Тренажеры и группы мышц: Библиотека знаний
Какие мышцы работают на занятиях на гребном тренажере?
Тренажер-гребля представляет собой точную имитацию движений спортивной гребли. С помощью нехитрых упражнений и различных типов нагрузки на нем можно развить идеальный мышечный каркас на ногах, ягодицах, спине и руках. Тренировки с постоянной нагрузкой на гребном тренажере великолепно задействуют даже «спящие» мышцы. Здесь упражнения не строятся на преодолении собственного веса, поэтому тренажер рекомендован пользователям с избыточным весом, а так же людям с заболеваниями коленных и голеностопных суставов.
Какие мышцы работают при гребле?
В первую очередь, упражнение гребля включает в работу верхнюю часть тела – это плечи, спина, грудь и предплечье. Благодаря широкому охвату групп мышц, задействованных в работе при тренировках, качаться так же будут икроножные мышцы, четырехглавая мышца бедра, мышцы брюшного пресса, большая ягодичная мышца и многие другие. В целом же, механизм отработки упражнений на гребном тренажере сходен по принципам с тягой штанги к поясу, что, как известно, является основным упражнением для становления мышечного каркаса спины. Если подходить к тренировкам системно и грамотно следить за нагрузками, то можно разработать спину и плечи настолько, что они будут выглядеть заметно шире.
Если подходить к тренировкам системно и грамотно следить за нагрузками, то можно разработать спину и плечи настолько, что они будут выглядеть заметно шире.
Распространенные заблуждения
Тренажер гребля позволяет с успехом тренировать практически всё тело. Казалось бы, значительную нагрузку должны нести коленные суставы и позвоночник, а это сразу отсекает возможность использования тренажера для людей с избытком веса или больными суставами. Однако, при правильном выполнении упражнений: соблюдении правильного положения корпуса и плавным техничным движениям, нагрузка на больной позвоночник или суставы будет минимальна. И всё же совсем не лишним будет узнать о возможности использования тренажера у своего врача.
Вторым распространенным заблуждением насчет гребли является мнение прекрасной половины человечества о том, что тренировки, основанные на этом виде спорта, обязательно сделают спину широкой, а плечи – некрасивыми. Это мнение ошибочно, ведь гребной тренажер распределяет нагрузки равномерно между спиной, грудью, животом, ногами и руками.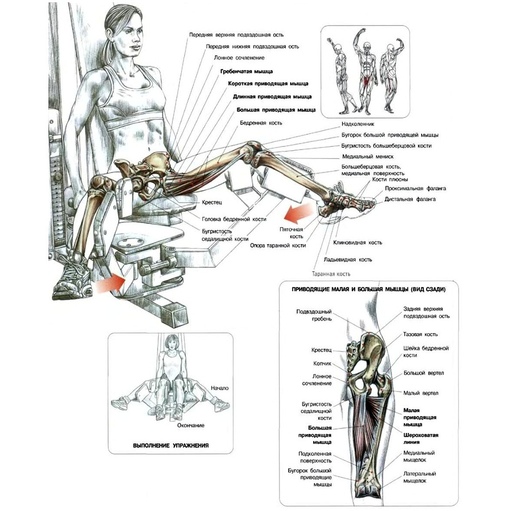 Если не делать специальных подходов с упражнениями на прокачку спины и плечей, то милые дамы рискуют только тем, что приведут тело в тонус и потеряют несколько лишних килограмм.
Если не делать специальных подходов с упражнениями на прокачку спины и плечей, то милые дамы рискуют только тем, что приведут тело в тонус и потеряют несколько лишних килограмм.
Качаем мышцы правильно
При выполнении упражнений всегда обращайте внимание на спину: ее нужно держать ровно и стараться не перенапрягать, основную нагрузку тут несут бедра и ягодицы. Следует следить и за коленями, они не должны сильно работать. Не забывайте проводить разминку до тренировки и растяжку – после нее. Чтобы разработать определенные группы мышц, нужно выполнять упражнения с различных хватом. Так, если использовать прямой хват, то есть направлять ладони вниз, тренажер работает в основном с трицепсом и мышцами спины, а в обратном хвате с ладонями вверх задействованы грудные и плечевые мышцы, в частности, — бицепс.
Выстраиваем цели тренировок
1.Разрабатываем и качаем мышцы
Для того, чтобы развить мускулатуру на гребном тренажере, следует заниматься не более 30 минут, при этом, сначала необходимо грести в медленном темпе, но с самым сильным сопротивлением, затем использовать быстрый темп и маленькую нагрузку. В первой части упражнения Вы будете производить не больше 20-ти гребков в минуту, тогда как во второй – около 80-ти. Полезно будет совершать перерыв в тренировке каждые 15 минут, при этом, не стоит расслабляться. Перерыв – это самое удачное время, чтобы сделать упражнения на пресс, мышцы рук и поприседать с весом. Обычное время перерыва – 1 минута.
В первой части упражнения Вы будете производить не больше 20-ти гребков в минуту, тогда как во второй – около 80-ти. Полезно будет совершать перерыв в тренировке каждые 15 минут, при этом, не стоит расслабляться. Перерыв – это самое удачное время, чтобы сделать упражнения на пресс, мышцы рук и поприседать с весом. Обычное время перерыва – 1 минута.
2.Худеем и приводим тело в тонус
Если Вы занимаетесь для снижения веса, то нужно делать равномерные плавные упражнения со средним сопротивлением. Начинать следует от легкого к тяжелому, от короткого времени занятия к более продолжительному процессу. Прекрасным подсказчиком тут послужит пульс. У многих моделей гребных кардиотренажеров имеется датчик пульса, например, в Kettler Favorit, Horizon Oxford II. Для сбрасывания лишних килограмм следует следить, чтобы пульс не превышал 60-70 % от допустимого. В целях же наращивания мышечной массы, это значение было бы больше.
Регулярность и систематичность в тренировках – это главный залог успешного построения красивого тела. Стоит помнить так же о здоровом питании и активном образе жизни, и тогда результат тренировок закрепится на долгие годы.
Стоит помнить так же о здоровом питании и активном образе жизни, и тогда результат тренировок закрепится на долгие годы.
Преимущества гребной тренировки
Впечатляющие преимущества гребной тренировки – не трюк и не маркетинговая уловка. Гребля — это не новое направление, требующее рекламной поддержки. Она имеет вековую историю, а ее бесчисленные преимущества научно доказаны!
Американский Колледж Спортивной Медицины (American College of Sports Medicine) рассматривает гребные тренажеры «лучшим оборудованием в спортивном зале», которое позволяет «тренировать все важнейшие группы мышц плавным и контролируемым движением». Журнал Men’s Health считает, что «гребные тренажеры обеспечивают лучшую тренировку для всего тела среди кардио тренажеров, потому что задействуют как нижнюю, так и верхнюю части тела, что ведет к повышенным результатам». Даже астронавты NASA используют гребные тренажеры из-за их эффективности.
Ниже описаны 10 основных преимуществ гребли:
1. Улучшение кардиоваскулярной системы
Как и другие кардио упражнения, гребля заставляет сердце «прокачивать» кровь через мышечную массу, насыщая ее энергией (кислородом), питательными веществами и выводя отходы (углекислый газ и молочную кислоту). Однако гребля оказывает гораздо большее влияние на описанные процессы, что делает тренировку эффективнее. Дело в том, что
Кроме того, учитывая, что человеческое тело потрясающе эффективно подстраивается под различные нагрузки, то для тренировки просто полезно менять нагрузку.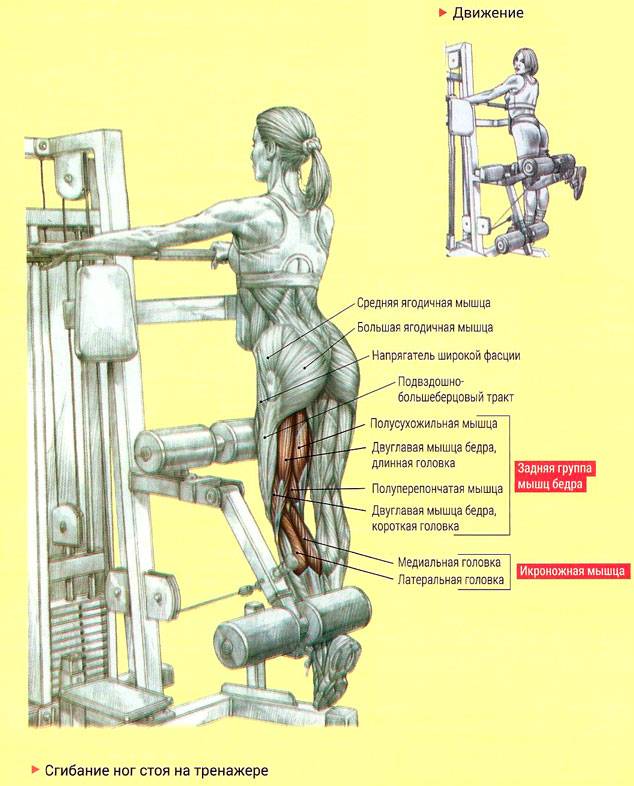
2. Повышенное сжигание калорий
Соревнующиеся гребцы тратят почти в 2 раза больше калорий на дистанции в 2000 м, чем бегуны с препятствиями на дистанции 3000 м.
Потрясающий эффект гребли в сжигании калорий вызван большим количеством задействованных мышц. Данные о количестве сжигаемых калорий разнятся, что объясняется разными условиями тренировок. К примеру, Harvard Health Publication заявляет, что гребец весом 84 кг сжигает 377 ккал за 30 минут. Фредерик Хагерман (Frederick Hagerman) из лаборатории физиологической работы в Университете Огайо утверждает, что гребля сжигает на 10–15% больше калорий, чем велоезда. Есть данные, что часовое занятие на гребном тренажере сжигает 600 ккал. Инструкторы программ ShockWave и Indo-Row, использующие гребные тренажеры WaterRower, утверждают, что участники данных программ сжигают в среднем по 800 калорий за час! Согласитесь, что сжигать 400–800 ккал за меньше, чем за час — это потрясающе.
3. Тренировка всего тела. Увеличение мышечной силы и выносливости
Уникальность гребли состоит в том, что она позволяет повышать как силу, так и выносливость (хотя выносливость, конечно, в первую очередь). За счет повторяющихся толкающих и тянущих движений вы вызываете адаптацию в организме, мышцам приходится совершать усилия без соответствующей усталости. Повышая нагрузку с течением времени, вы заставляете мышцы расти, становясь сильнее. При постоянных тренировках вы также ускорите свой метаболизм. Больше энергии — значит больше возможностей делать то, что вы любите!
Тем, кто никогда не сталкивался с гребным тренажером, может показаться, что вся нагрузка ложится на руки и корпус. На самом деле, в отличие от сайкл-классов, где нагрузка распределяется неравномерно (95% на нижнюю часть тела и 5% на верхнюю),
В начале движения задействуется нижняя часть тела. Первичными мышцами здесь являются квадрицепсы и мышцы передней поверхности бедра. Эти мышцы участвует в процессе разгибания колена, а также сгибание бедра, что позволяет делать мощное движение ног. Икроножные и ягодичные мышцы также нагружаются в гребле.
Первичными мышцами здесь являются квадрицепсы и мышцы передней поверхности бедра. Эти мышцы участвует в процессе разгибания колена, а также сгибание бедра, что позволяет делать мощное движение ног. Икроножные и ягодичные мышцы также нагружаются в гребле.
Во время гребка вы выполняете сгибание бедер и корпуса, что, казалось бы, задействует мышцы пресса аналогично скручиваниям. На самом деле, сопротивление направлено в обратную сторону, а значит, задействуются ягодичные мышцы, мышцы нижней части спины и мышцы задней поверхности бедра. Пресс же задействуется на стадии восстановления, когда вы возвращаетесь в исходную позицию!
4. Низкая травмоопасность
В гребле негативная нагрузка на суставы сведена к минимуму. Так как гребец находится в сидячем положении, ноги уперты в подставку, а руки держатся за рукоятку, то на голеностоп, колени, тазобедренный сустав, локти и плечи оказывается очень малая нагрузка.
Движение в гребле противоположно нашей повседневной нагрузке, когда мы сидим за компьютером, печатаем или едем за рулем. Это позволяет использовать греблю как «лекарство» от негативного воздействия современного образа жизни. Каждый гребок требует жима ногами, сгибания/разгибания тазобедренного сустава, сведения лопаток (открытие грудной клетки). Мы «проходим» через череду движений, увеличивающую мобильность нижней части спины, коленного и плечевого суставов.
Но гребля замечательно подходит не только для предупреждения травм, но и для тех, кто уже столкнулся с подобными проблемами. Для людей с избыточным весом или для тех, у кого имеются проблемы с суставами, гребля может быть выходом.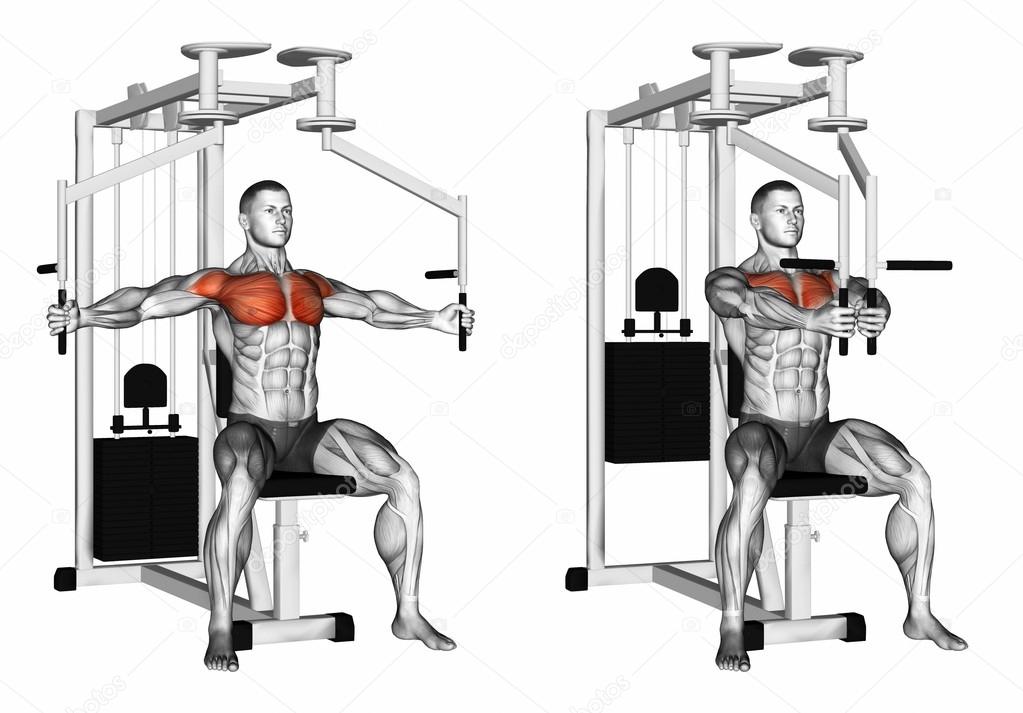
5. Командная или индивидуальная работа
Гребля может быть отличной индивидуальной или групповой тренировкой. В мире возникает множество гребных студий, по аналогии с сайкл-студиями, с энергичными инструкторами, ритмичной музыкой и простыми, повторяющимися движениями. Это отличная опция для тех, кто хочет получить все преимущества гребли, но не хочет заниматься один.
Ну, а если вы не фанат групповых тренировок, вы можете тренироваться в залах один, либо купить гребной тренажер домой, тем более он относительно недорогой.
6. Относительно недорого
Покупка высококачественного гребного тренажера обойдется дешевле, чем аналогичного по качеству сайкл-тренажера, не говоря о беговой дорожке.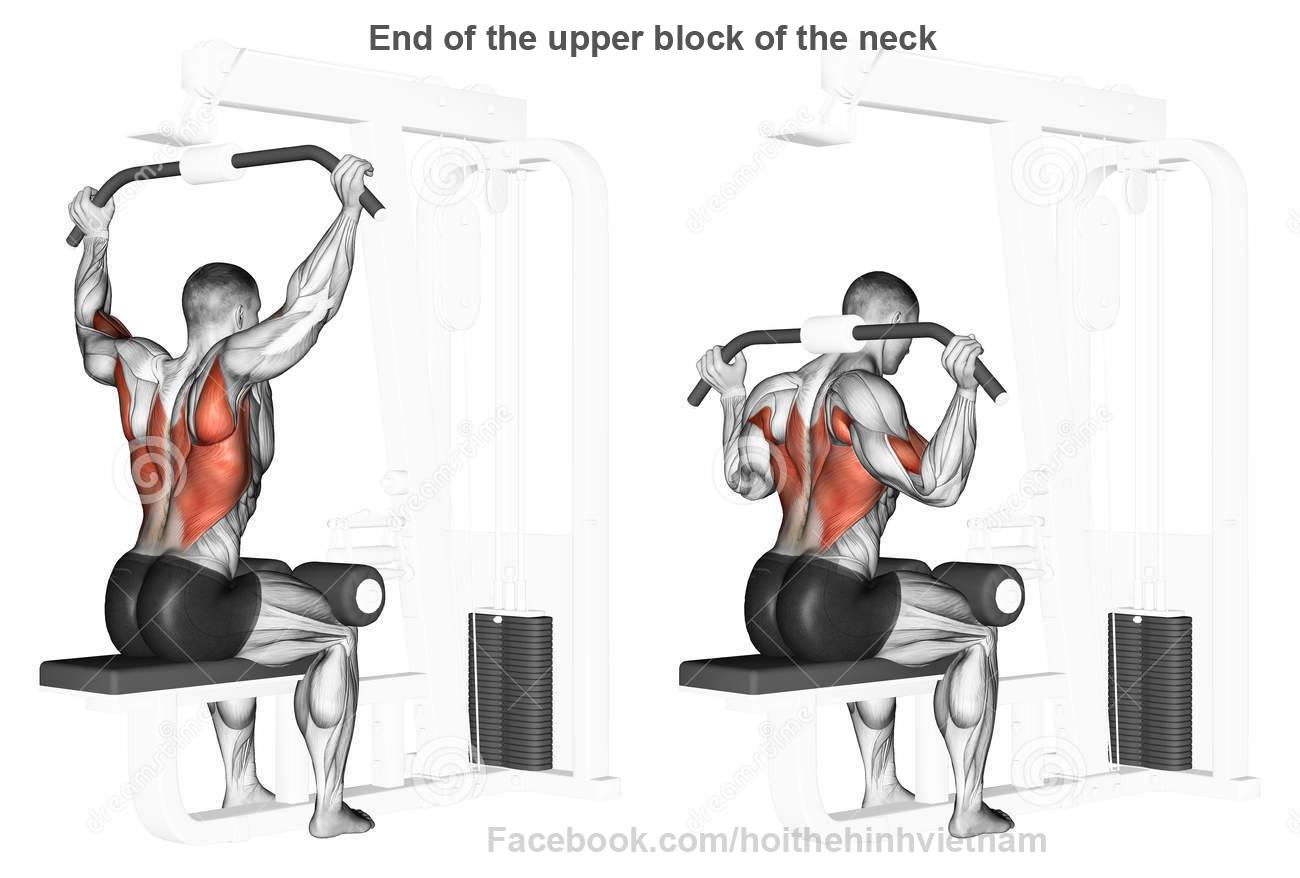
Если вы рассматриваете покупку гребного тренажера домой, то и здесь можно подобрать цены, которые подойдут именно вам.
7. Доступность
Задумывались вы или нет, но бегом, ездой на велосипеде, плаванием может в той или иной степени заниматься каждый, не ходя в зал. Что касается настоящей гребли, то здесь пользователи могут испытать ее преимущества только в тренажерном зале….или купив гребной тренажер домой. Покупка гребного тренажера может быть идеальным решением для тех, кто занимается бегом, велосипедной ездой летом, и ищет кардио тренажер на зиму.
8. Это весело
Поскольку гребля задействует все тело, то вы раньше увидите результат. Вы можете бросить себе вызов, увеличивая сопротивление. Вы можете включить любимое шоу или музыку во время занятий. И само движение не такое нудное, вам нужно меньше времени. Физическая активность стимулирует центры наслаждения в мозгу, кардиоваскулярная нагрузка увеличивает количество эндорфинов, что снижает уровень стресса и даже депрессии.
9. Экономит время
Тренировка всего тела экономит ваше время. Вам не нужно отдельно тренировать верхнюю или нижнюю части тела, пытаться дополнительно сжигать калории или давать аэробную нагрузку.
10. Легко начать
Как бы странно это не звучало, но человек не может просто взять и побежать. Точнее побежать может, а вот правильно побежать — уже нет. Бегу нужно учиться и долго. Аналогично нужно учиться играть в теннис, новым танцевальным движениям и проч., гребля не требует таких усилий. Правильному движению можно научиться за одно занятие.
Вместо послесловия
Если вы дочитали до этого места, то вы должно быть потрясены теми преимуществами, которые обладает гребля. Но чтобы быть до конца честными, следует оговориться, что не все тренажеры в равной степени эффективны. На сегодняшний день наиболее полно неповторимый эффект гребли воссоздают только два вида тренажеров: одни из них основаны на водном сопротивлении, конструкция других использует преимущества динамического движения.
Какие группы мышц можно прокачать на уличных тренажерах и с чего начать тренировки
Любитель воркаута Кирилл Климонтов в беседе с корреспондентом агентства «Минск-Новости» рассказал, за развитие каких групп мышц отвечают те или иные уличные тренажеры, и дал советы по организации самостоятельных занятий воркаутом.
К радости поклонников здорового образа жизни в Минске с каждым годом становится все больше уличных тренажеров. Их устанавливают возле школ, во дворах, в скверах, парках. Нехитрые конструкции по силам освоить молодежи, людям в возрасте, школьникам. А самое важное — тренировки проходят на свежем воздухе. Завсегдатаи говорят, что сюда приходят семьями, компаниями. И это здорово!
Одну из таких площадок — у средней школы № 203 — протестировал воркаутер с семилетним стажем Кирилл Климонтов.
Гребной тренажер
Профессиональным гребцам вряд ли поможет набрать кондиции, зато любителям — пожалуйста. Нагрузка на мышцы спины, груди, а также на бицепсы.
Твистер
Отличный вариант для разогрева мышц и сухожилий. Хорошо разминает косые мышцы пресса, поясницу. Можно использовать и в качестве брусьев. В этом случае задействованы мышцы груди и трицепсы.
Тренажер для разведения ног
Подходит для прокачки внешней части бедра.
Верхняя тяга
Задействована спина, в меньшей — степени бицепсы. Помогает подготовиться к подтягиванию на турнике.
Скамейка для пресса
Идеальна для проработки прямых и косых мышц пресса. Необходимо выполнять подъем туловища без резких рывков.
Тяга для трапециевидных мышц
Основное направление — нагрузка на трапециевидную мышцу и плечи. Снаряд можно использовать и как брусья. Только это будет облегченный вариант тренировок для тех, кто еще не научился отжиматься (задействованы мышцы груди и трицепсы).
Жим от груди
Хорошо работают плечи, в меньшей степени — грудь и бицепсы.
Подводим итог
Площадка — отличный вариант для начинающих, пожилых, школьников. Пожилым, например, тренировки помогают в решении проблем с суставами, кровообращением, пищеварением, остеопорозом. Только перед началом занятий желательно проконсультироваться с врачом.
Можно разминаться и подготовленным любителям здорового образа жизни, укреплять мышцы, сухожилия и связки. Хорошо, что есть навес, который спасает от солнца и дождя.
Не хватает снаряда, чтобы нагрузить ноги: велотренажера, жима ногами, шагового. Не помешал бы и турник со шведской стенкой. Неплохо, чтобы была табличка с картинками, как правильно использовать тренажеры. Не исключено, что табличка была, но ее вырвали.
Советы начинающим любителям спорта
1 Начинать необходимо с разминки. Пять минут позанимайтесь на кардиотренажерах или побегайте.
Внимание! Людям с лишним весом бегать не стоит — нагрузка на колени.
2 Поешьте за 1,5–2 часа до занятий. В рационе должны быть овсянка или гречка, ржаной хлеб, овощи, куриная грудка, рыба, яичный белок.
Внимание! Жесткая диета и тренировки несовместимы.
3 Тренировки раз в неделю не дадут желаемых результатов. Заниматься 6–7 раз в неделю тоже не нужно: мышцам надо отдыхать. Для начала достаточно делать 12–15 повторений за два подхода. Со временем число подходов можно увеличить.
Внимание! Лучше начинать с 2–3 тренировок в неделю.
4 Завершите занятие растяжкой, которая расслабит все мышцы. Выпады растянут мышцы внутренней стороны бедра, повороты шеи — кивательные и грудино-ключичные мышцы, наклоны к ноге — подколенные сухожилия.
Фото Сергея Шелега
Тренировка одной группы мышц на профессиональном оборудовании для тренажерного зала
Это вполне объяснимо: люди хотят видеть максимально быстрый результат, тем более, что реклама нередко щедро его обещает.
Существует стереотип, согласно которому чем чаще прорабатываешь интересующую группу мышц на профессиональном оборудовании для фитнеса – тем лучше. Однако он – ложный.
Слишком частая проработка одних и тех же мышц, без предоставления им времени на отдых и восстановление скорее сведет на нет все усилия. В то время как слишком редкие тренировки не дадут эффективного роста мышц… Найти золотую середину интенсивности проработки мышечных групп на профессиональных спортивных тренажерах непросто, но мы все-таки попробуем.
Для начала, напомним, что тренированность как таковая представляет собой приспособление организма к внешним воздействиям, которым вы подвергаете его на профессиональном оборудовании для фитнес-клуба. Вы используете профессиональные тренажеры – а тело откликается на это активизацией своих двигательных качеств. Чем больше вы используете профессиональные беговые дорожки, велотренажеры, эллиптические тренажеры и прочие кардиоснаряды – тем активнее идет похудение и возрастает выносливость. Чем больше используете профессиональные тренажеры для пресса и другие силовые тренажеры – тем активнее прокачиваете мышцы, добиваясь их роста.
Как только организм полностью привыкает к предлагаемому уровню нагрузок – качественный рост прекращается.
Поэтому для сохранения результативности нагрузки необходимо плавно повышать, а также время от времени корректировать план тренировок. Разумеется, это можно эффективно делать только в условиях фитнес-клуба. Купить профессиональные тренажеры разной направленности домой невозможно – они не влезут даже в достаточно обширное жилище. Даже если вы завели 1-2 домашних тренажера, возможности тренировки на них не сравнятся с теми, которые предоставляет фитнес-клуб.
Период, который понадобится организму для адаптации к нагрузкам на профессиональных тренажерах – краеугольный камень для вычисления интенсивности тренировок каждой мышцы или мышечной группы. Разумеется, тело каждого – индивидуально, и может выдавать совершенно разные реакции на тренировки. Однако существуют некие общие принципы.
Так, физиологи за годы наблюдений и становления фитнеса как прикладной науки установили, что мышцы позволяют себе «распускаться» не ранее, чем на седьмой день после прекращения тренировок.
Таким образом, до падения уровня выносливости, силы и уменьшения объема мышц у вас есть как минимум неделя как предельный срок.
Впрочем, это не означает, что вы должны забросить профессиональные тренажеры на неделю целиком и полностью. Напротив, идеальный цикл тренировок – это два-три занятия в неделю, причем не подряд. А вот планы тренировок для каждого занятия стоит менять. Допустим, одно занятие в неделю вы используете профессиональные тренажеры для пресса, скамьи для жима и прочие силовые тренажеры, прорабатывая интересующие группы мышц. А второе занятие будет полезно посвятить работе на кардио-оборудовании (профессиональные велотренажеры, эллиптические тренажеры, беговые дорожки) — для развития выносливости и похудения.
Если ваши тренировки для проработки конкретной мышечной группы или отдельной мышцу будут ударными, то стоит повторять их не чаще раза в неделю.
Чем интенсивнее тренировка – тем больше времени понадобится мышцам для восстановления и усвоения предложенного уровня нагрузки. Единственный вариант ускорения восстановления – это прием специальных анаболических стероидов, с которыми тем, кто ходит на профессиональные тренажеры для здоровья и красоты, связываться не стоит.
В принципе, если у вас стоят задачи по достижению результата ускоренными темпами, можно тренировать мышечную группу и два раза в неделю – но это предел.
Кроме того, только одна тренировка из этих двух может быть интенсивной. Вторую же стоит сделать более легкой. Кроме того, не забывайте о необходимости общей разминки – для этого используйте профессиональный эллиптический тренажер, беговую дорожку, велотренажер, прозанимавшись на них порядка 15-20 минут. В «легкой» тренировке профессиональное кардио-оборудование для фитнес-клубов можно задействовать еще более активно.
Если ваш обычный график посещения профессиональных тренажеров – два занятия в неделю, и при этом вы устаете в течение рабочего дня, прорабатывайте группу мышц один раз в неделю. Далее, по мере втягивания в тренировки, прислушивайтесь к своим ощущениям, реакциям тела, — и отталкивайтесь от них.
Таким образом, прорабатывать одну группу мышц при помощи профессиональных тренажеров нужно не реже, чем один раз в десять дней, но и не чаще двух раз в неделю.
Найти свою нишу в этом коридоре «от … до» можно только после изучения скорости и особенностей восстановления своего организма. А на нее влияет множество факторов: от интенсивности тренировки до пола, возраста, общей усталости за день и т.д. Закономерно, что с возрастом скорость восстановления тела замедляется. И, между прочим, мышцы женщин восстанавливаются быстрее, чем у мужчин, хотя как раз последние предпочитают силовые тренировки. В то время как дамы, стремящиеся к стройности и общей подтянутости тела, активнее используют профессиональные беговые дорожки, эллиптические тренажеры, велотренажеры и другое кардио-оборудование для фитнес-клубов.
Гребной тренажер: какие мышцы работают? | Статьи | Zonasporta.com
Гребной тренажер: какие мышцы работают?
Когда в дом хотят приобрести спортинвентарь, то немало внимания уделяют его характеристикам. Поэтому если вам нужен гребной тренажер, то какие мышцы работают при занятиях на нем – это один из самых важных вопросов. Ответ на него можно будет найти во время прочтения данной статьи.
Для начала разберемся с тем, что собой представляет рассматриваемое устройство. Тренажер, имитирующий греблю на лодке, – это простая конструкция, состоящая из ручек, сиденья, корпуса и маховика. При этом выполнение упражнений на ней направлено на улучшение здоровья и форм человека.
В качестве возможных результатов занятий на таком устройстве отмечают:
- Улучшение тонуса организма.
- Снижение веса.
- Улучшение работы сердца и дыхательной системы.
- Повышение настроения и снятие напряжения.
- Мышцы, которые качаются на гребном тренажере, приходят в тонус, увеличиваются в объеме. Также наблюдается повышение их силы и выносливости, впрочем, как и после выполнения других физических упражнений.
Противопоказаны ли кому-то занятия на рассматриваемом спортинвентаре? Да. Доктора настоятельно не рекомендуют тренироваться людям с дискогенным радикулитом, артериальной гипертензией, онкологическими заболеваниями и т.д. В идеальном варианте, перед тем как приступить к систематическим и интенсивным физическим нагрузкам, необходимо проконсультироваться с терапевтом.
Отдельно несколько строк нужно выделить для опровержения пары мифов, нередко нависающих над рассматриваемым устройством.
- Во-первых, некоторые представительницы слабого пола думают, что такое упражнение, как гребля, способно сделать их широкоплечими мужеподобными особями. Это не так. При выполнении базовых упражнений тело просто приводится в тонус. Чтобы существенно увеличить мышцы плеч и спины, нужно выполнять специальный комплекс.
- Во-вторых, раз качаются все мышцы, значит, позвоночник и коленные суставы будут слишком напряжены – полным людям и спортсменам с травмами такой тренажер противопоказан. Это не так. При верном выполнении упражнений (плавные движения, правильное положение тела и т.д.) нагрузка распределяется равномерно. Больной позвоночник и суставы не будут получать слишком большие нагрузки, то есть людям с лишним весом или травмами данный тренажер не противопоказан.
Вы решили приобрести гребной тренажер: какие группы мышц спины, плеч и туловища работают при выполнении упражнений на нем? Сейчас разберемся. Итак:
- Мускулатура спины (широчайшие и трапеция).
- Мышцы плеч (дельтовидная и др.).
- Грудные.
- Бицепсы и трицепсы.
- Пресс.
К слову, чтобы изменить нагрузку на ту или другую группу мышц, иногда достаточно просто изменить тип хвата. Приводим пример. Если хват прямой, то интенсивнее будут работать трицепсы, а также мышцы спины, если же он обратный, то нагрузка в основном придется на бицепсы, мышцы груди и плечевого пояса.
Гребной тренажер: получают ли нагрузку ноги?Если у вас появится гребной тренажер, ноги во время занятий тоже будут получать некоторую нагрузку. В случае, когда вы стремитесь увеличить мышцы нижних конечностей целенаправленно, лучше обратить свое внимание на другой спортинвентарь, например на велотренажеры.
Тем не менее, если вы хотите выполнять упражнения на гребном тренажере, чтобы подтянуть не отдельные мышцы, а все тело в целом (с акцентом на верхнюю часть туловища), будут качаться и ноги в том числе, в частности такие мышцы, как:
- Ягодичные.
- Четырехглавые.
- Прямые мышцы бедра.
- Седалищно-пещеристые.
- Икроножные и др.
Чтобы ваши тренировки проходили максимально эффективно, лучше всего первые занятия провести под присмотром специалиста. Он и программу вам поможет разработать, и пресечет ошибки в выполнении упражнений, что позволит вам заниматься дома без вреда себе.
Купить гребной тренажер по выгодной ценеКупить гребной тренажер, чтобы сделать мышцы крепче, можно быстро и без преград, если вы клиент ZonaSporta.
Наше предприятие не один год работает с целью увеличения своего ассортимента и повышения уровня сервиса. Такое направление деятельности позволяет расширять нашу клиентскую базу. При этом сами заказчики получают необходимую им продукцию в срок и обещанного качества.
Сегодня приобрести у нас гребные тренажеры довольно просто и чрезвычайно выгодно, в частности благодаря:
- Немалому ассортименту товаров из рассматриваемой категории.
- Демократичности нашей ценовой политики. Устанавливая стоимость отдельных единиц продукции, мы заботимся о клиентах. Специалисты занимаются анализом рынка и уровнем потребительской способности россиян с целью нахождения того уровня цен, при котором обе стороны (продавец и покупатель) были бы удовлетворены взаимным сотрудничеством.
- Оперативности доставки.
- Возможности осуществления самостоятельного вывоза продукции.
- Удобным способам внесения оплаты.
- Предоставлению официальной гарантии на всю нашу продукцию.
- Бесплатным и своевременным консультациям.
Желаете обзавестись гребным тренажером? Тогда звоните в ZonaSporta.
Какие группы мышц работают на гребном тренажере?
Гребной тренажер — механизм универсального назначения для развития или подтягивания многих групп мышц. Этот аппарат, позволяющий имитировать работу гребца в лодке, способен давать приличную нагрузку на мускулатуру не только плечевого пояса, а практически всего тела.
Давайте более подробно обсудим, какие мышцы работают на гребном тренажере.
Показания к использованию
Гребной тренажер подходит для применения в целях повышения тонуса отдельных групп мышц и всего тела.
Рекомендуется для людей разной степени тренированности и имеющих противопоказания для некоторых видов спортивных занятий.
Главные преимущества этого тренажера:
- разрешен для тренировок тем, кто имеет лишний вес, т.к. даже при интенсивной нагрузке не оказывает травмирующего ударного воздействия на коленный и бедренные суставы;
- способствует снижению веса и укреплению сердечно-сосудистой системы;
- помогает развитию атлетических параметров корпуса: развивает и увеличивает рельефность мышц;
- помогает укрепить мышечный корсет, поддерживающий позвоночник в хорошем состоянии, растянуть нуждающиеся в растяжке группы мышц.
Видео тренировки на гребном тренажере:
Работающие мышцы
При правильно организованной тренировке на гребном имитаторе задействованы многие мышцы:
- грудная большая;
- дельтовидная;
- трапециевидная;
- передней стенки живота;
- плечевая;
- предплечья;
- бицепс;
- трицепс;
- ягодичная большая;
- передняя бедра;
- четырехглавая бедра;
- прямая бедренная;
- седалищно-пещеристая;
- икроножная.
Из списка видно, что задействованы мускулы груди, спины, живота, рук и ног. 80% мышц в той или иной степени участвуют в работе тела.
Организация тренировок
Самое главное правило — регулярность. Тренировки проводят с установленной периодичностью не реже 3 раз в неделю.
Очень важна постепенность увеличения нагрузок и продолжительности занятий.
В дозировании рекомендуется ориентироваться на показания частоты сердечных сокращений по известной формуле: 220 минус количество лет занимающегося.При кардиозанятиях с целью борьбы с лишним весом пульс должен быть 60 — 70% от разности по формуле. Для силовых тренировок и развития мышц — выше 70%.
Процесс тренировки также различен. Для моделирования тела подойдут несколько подходов с ускорением в конце каждого и сменой деятельности в перерыве. А для худеющих — равномерно распределенные по времени нагрузки с постепенным нарастанием от занятия к занятию.
Советы тренеров
Тренировка не должна занимать меньше 40 и больше 60 минут.
Перед началом работы на тренажере необходимо провести разогревающую разминку.
Во время тренировки на гребном имитаторе важно следить за поддержанием правильной осанки. Во время тяги и отведения туловища наклон должен составлять не менее 45 градусов.
Рекомендуется менять положение рук при захвате рукояток — ладонями вверх или вниз — задействуя разные мышцы.
Положение стоп хорошо фиксируется на упоре.
Тяга проводится на вдохе, возврат и группировка — на выдохе.
В перерывах между подходами рекомендуется проводить приседания.
Противопоказания
При наличии хронических заболеваний сердца тренировки возможны вне острого периода и с разрешения лечащего врача.
При проблемах с позвоночником также не следует самостоятельно принимать решение о тренировках на этом аппарате.
Заболевания суставов плеча требует консультации специалиста перед началом тренировок.
Обмен опытом и отзывы
Михаил, 34 года: регулярно занимаюсь на имитаторе гребли дома в течение 7 месяцев, 5 раз в неделю, примерно по 40 мин. Избавился от 8 кг, руки стали сильнее. Прошли головные боли, сердце стало лучше справляться с нагрузкой — без труда поднимаюсь на 9 этаж.
Татьяна, 42 года: были слабыми руки и ягодицы. Прогулки и бег не укрепили их. А с гантелями заниматься не смогла — не моё. После тренировок на гребном тренажере исправилась осанка, спина и ягодицы стали упругими, а походка пружинистой.
Алексей: гребной тренажер мне подходит для развития многих групп мышц и поддержания тонуса тела.
Имитатор гребли — это тренажер широкого спектра воздействия на мускулатуру тела. Его использование для аэробных кардиозанятий способствует формированию желаемой фигуры без перегрузок организма. Можно заниматься в тренажерном зале или приобрести портативный аппарат для домашнего использования.
Перед началом тренировок рекомендуется получить советы врача и тренера. Желаем успехов!
Смотрите видео, какие еще упражнения можно выполнять на гребном тренажере:
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Локомоторная стратегия при педалировании: группы мышц и биомеханические функции
Группа одновременно возбужденных мышц, чередующаяся с другой группой, является обычным элементом моторного контроля, включая формирование двигательного паттерна. В этом исследовании использовалось компьютерное моделирование для изучения педалирования человека с каждой мышцей, время от времени закрепленной за группой. Моделирование было создано путем применения паттернов мышечных возбуждений к модели опорно-двигательного аппарата, которая включает динамические свойства мышц, сегментов конечностей и нагрузку на кривошип.Raasch et al. показали, что электромиограммы, силы реакции педали и кинематика конечностей и кривошипа, записанные во время педалирования на максимальной скорости, могут быть воспроизведены с помощью двух сигналов, управляющих возбуждением четырех групп мышц (одна группа чередуется с другой, образуя пару). Здесь также показано, что контрольная группа с четырьмя мышечными группами воспроизводит устойчивое педалирование. Однако симуляции показывают, что три сигнала, управляющие шестью группами мышц (т. Е. 3 парами), являются гораздо более биомеханически устойчивыми, так что можно хорошо выполнять широкий спектр задач, связанных с педалями вперед и назад.Мы обнаружили биомеханические функции, необходимые для вращения педалей, и то, как эти функции могут выполняться группами мышц. В частности, фазирование двух пар по отношению к разгибанию и сгибанию конечностей и переходы между разгибанием и сгибанием не меняются в зависимости от направления педалирования. Одна пара групп (моносуставные разгибатели бедра и колена, чередующиеся с их анатомическими антагонистами) генерирует энергию, необходимую для движения конечности и кривошипа во время разгибания и сгибания конечностей, соответственно.Во второй паре подошвенные сгибатели голеностопного сустава передают энергию от инерции конечности к кривошипу во время последней части разгибания конечности и последующего перехода конечности от разгибания к сгибанию. Дорсифлексоры чередуются с подошвенными. Фазирование третьей пары (двухсуставных мышц бедра) меняется в зависимости от направления педалирования. При педалировании вперед подколенное сухожилие возбуждается во время перехода от разгибания к сгибанию и при вращении назад во время противоположного перехода. В обоих случаях подколенные сухожилия толкают кривошип назад через переход.Прямая мышца бедра чередуется с подколенными сухожилиями и продвигает кривошип кпереди через переходы. С помощью трех управляющих сигналов, по одному для каждой пары групп, можно достичь различных частот вращения педалей (или выходных мощностей) путем настройки общего возбуждающего движения в соответствии с элементами, генерирующими рисунок, и различных целей педалирования (например, плавного или энергоэффективного педалирования; 1 — или педалирование на двух ногах), регулируя уровни относительного возбуждения между группами мышц. Предлагается, чтобы эти шесть групп мышц были элементами общей стратегии управления педалями, которая может быть применима к другим локомоторным задачам человека.
Моделирование сложных динамических архитектур опорно-двигательного аппарата
Человеческий локтевой сустав
Сначала мы рассмотрим человеческий локтевой сустав, состоящий из мышц, сухожилий и костей (рис. 1a), чтобы проиллюстрировать, как сборки стержней соотносятся с физиологией, динамикой и морфологией. . В отличие от полностью совместимой системы, локтевой сустав демонстрирует как мягкие, так и жесткие характеристики, а также упрощенную динамику и уменьшенное пространство для конфигурации.Тем не менее, его анализ позволяет нам проверить и откалибровать нашу модель по множеству легко доступных данных (анатомических и биомеханических) и связать наше описание с широко используемой моделью Хилла 30 (см. Дополнительное примечание 1). Он также служит для иллюстрации уровня детализации нашего представления, который можно использовать для удовлетворения кинезиологических потребностей конкретного пациента.
Рис. 1Приведение в действие локтя человека. a Анатомия локтя. b Моделирование локтя, состоящего из трех костей (плечевая, локтевая и лучевая) и двух головок двуглавой мышцы (короткая и длинная голова), при выполнении полного сгибания. c Экспериментальные данные 60 и моделирование активной и пассивной силы, нормализованной пиковой силой \ ((F _ {\ mathrm {m}} {/} F _ {\ mathrm {max}}) \) во время изометрического упражнения (\ ({F} _ {\ mathrm {set}} \) имитирует сопротивление, с которым сталкивается мышца, и приводит к ее равновесной длине \ (\ eta \)). d Экспериментальные 61 и моделирование измерения крутящего момента локтевого сустава (под углом 60 °), выполняющего максимальные изокинетические концентрические сгибания при различных угловых скоростях вместе с соответствующим демпфированием общей скорости деформации мышц \ (\ zeta \).Затем численно определенные \ (\ zeta \) (см. Дополнительное примечание 2) сравниваются с теоретическими оценками, основанными на модели Хилла. 62
Мы воспроизводим двуглавую мышцу плеча (рис. 1b, оранжевые элементы) in silico, каждая голова смоделирована. как связка из 18 вязкоупругих стержней Коссера, каждый стержень представляет 20 двигательных единиц, всего 360, в соответствии со средними физиологическими измерениями 58 . Отметим, что количество моторных единиц на стержень может варьироваться в зависимости от желаемого уровня детализации.Эти стержни, основные уравнения которых можно найти в разделе «Методы», могут активно сокращаться и расслабляться. Их характерные выходные силы и время подергивания могут быть напрямую связаны с их площадью поперечного сечения через сократительное напряжение (\ ({\ sigma} _ {\ text {m}} \)). Это позволяет мышце соответствовать принципу размера 59 , который связывает низкую силу, медленно сокращающуюся активность с меньшими двигательными единицами, а высокую силу, быстро сокращающуюся активность — с более крупными (см. Дополнительное примечание 1). Для завершения сборки локтевого сустава мы рассматриваем плечевую, локтевую и лучевую кости (все они являются тонкими костями), представленные в виде пассивных жестких (фактически жестких) стержней с сужающимся сегментарным радиусом (рис.1б, фиолетовые элементы). Точно так же проксимальные и дистальные сухожилия моделируются как конические пассивные, но на этот раз эластичные стержни (рис. 1b, желтые элементы). Отметим, что кости не всегда тонкие, и в этом случае следует использовать смешанное представление, включающее твердые тела или МКЭ.
Окончательная сборка и ее конфигурационное пространство достигаются путем задания граничных условий и связи между различными элементами. Сферические суставы (свободное относительное вращение) используются для соединений мышца-сухожилие, кость-сухожилие и плечо-плечо.Шарнирное соединение (относительное вращение в заданной плоскости) применяется для соединения плечевой кости и лучевой кости, в то время как неподвижное соединение (без относительного движения) используется для соединения локтевой кости и лучевой кости. Для имитации чистых упражнений на сгибание-разгибание (как здесь предполагается) мы не учитываем относительное вращение между локтевой и лучевой костями, которое происходит во время пронации-супинации. Однако эти движения можно смоделировать, переопределив соединение сустава, чтобы учесть повороты в двух перпендикулярных плоскостях. Полная сборка колена изображена на рис.1b. Подробную информацию о моделировании и граничных условиях можно найти в разделе «Методы», а биомеханические свойства составляющих элементов обобщены в дополнительной таблице 1.
Затем мы выполнили изометрические (статические) и изокинетические (динамические) тесты для проверки их соответствия экспериментам 60, 61 . Изометрический тест проводится с двуглавой мышцей, выполняющей максимальное произвольное сокращение (MVC) против неподвижной ручки, так что движение в локтевом суставе ограничивается, а длина мышцы \ (\ eta \) двуглавой мышцы остается постоянной.Повторяя это упражнение для разных положений рукоятки, выходная статическая сила отображается на мышцы разной длины (рис. 1c). Чтобы выполнить тест in silico, мы используем имеющиеся экспериментальные данные (рис. 1c) для вычисления полиномиальных подгонок, которые определяют активную MVC мышцы и пассивную упругую реакцию (рис. 1c) в зависимости от ее удлинения \ (\ eta \) (см. Дополнительные Заметка 2). Как только эти биомеханические свойства определены, мы позволяем мышце (инициализированной при длине покоя \ (\ eta = 1 \)) выполнять свой MVC, применяя предписанные внешние силы \ ({F} _ {\ mathrm {set}} \) на своем заканчивается.Затем моделирование динамически развивает мышцу до ее статической равновесной длины \ (\ eta \). Повторяя этот эксперимент для различных \ ({F} _ {\ text {set}} \), мы можем связать длину мышцы со статической выходной силой (рис. 1c), подтверждая хорошее соответствие между симуляциями и экспериментами.
Изокинетические тесты вместо этого измеряют выходной динамический момент мышцы, выполняющей MVC, относительно ручки, движущейся с постоянной скоростью (сгибание сустава на рис. 1b). Когда мышца выполняет MVC во время срабатывания с изменением длины, ее вязкость вызывает демпфирующие эффекты, которые уменьшают выходную статическую силу.Мы принимаем во внимание эти эффекты с помощью коэффициента демпфирования \ (\ zeta \), который численно устанавливается для согласования смоделированных и экспериментальных выходных крутящих моментов (рис. 1d). Полученное значение \ (\ zeta \) было затем сравнено с теоретическими оценками 62 (дополнительное уравнение 5) и оказалось в разумном согласии (рис. 1d).
Наше моделирование также фиксирует морфологические деформации при изгибе сустава. Действительно, во время сокращения двигательные единицы укорачиваются, и из-за несжимаемости мышц 63 радиус двуглавой мышцы увеличивается (рис.1б). Наша модель учитывает несжимаемость (коэффициент Пуассона \ (\ nu = 0,5 \)) через фактор локальной дилатации \ (e \) уравнений. (3) и (4) (раздел «Методы» — математический вывод в Gazzola et al. 64 ) и предотвращает взаимное проникновение стержней, проверяя наличие столкновений между ними (уравнение (7)). Мы измеряем увеличение площади поперечного сечения бицепса на \ (\ sim \) на 28%, когда локоть образует угол 90 °, что соответствует \ (\ sim \) 30–34%, наблюдаемым экспериментально 65 .
Таким образом, мы виртуально реконструировали трехмерную копию локтевого сустава человека и, используя преимущества изометрических и изокинетических тестов, смоделировали, откалибровали и подтвердили срабатывание отдельных мышечных единиц, чтобы воспроизвести динамическое и морфологическое поведение этой системы.В целом, этот подход к моделированию имеет несколько преимуществ по сравнению с обычно используемой моделью Хилла: (a) Отдельные стержни (двигательные единицы разных размеров) можно выборочно задействовать или сделать пассивными (имитируя травму). В качестве примера в дополнительном примечании 6.2 мы предлагаем вспомогательное устройство (навеянное спиральными лесками Хейнса и др. 66 ), которое преобразует внутреннее скручивание в силы сокращения, чтобы помочь восстановить возможности тяжелой атлетики травмированного бицепса. (б) Податливые мышцы могут сгибаться, скручиваться и срезаться, чтобы реалистично реагировать на динамику всей конструкции и окружающей среды.Действительно, исследования, представленные в дополнительном примечании 6, показывают, что пренебрежение скручиванием или сдвигом (не учитываемым в моделях Кирхгофа или прядей 35,36,40,41,42 ) может иметь значительное количественное и качественное влияние, особенно когда окружающая среда производит три: размерные, колебательные и импульсные нагрузки.
Разработка биогибридных роботов
Далее мы используем наш решатель для разработки и изготовления плавательных и ходячих биогибридных ботов миллиметровой длины.
Для исследования плавающих биогибридных роботов мы сначала решаем прямую задачу путем численного моделирования и моделирования биогибридных жгутиков Williams et al. 23 , первый экземпляр функционализированного PDMS (полидиметилсилоксана) в сочетании с культивированными кардиомиоцитами, бьющимися в вязких жидкостях. Мы создаем однозначную вычислительную копию исходного пловца длиной \ (L = 1927 \) мм: подложка PDMS моделируется как одна пассивная нить накала, повторяющая экспериментальную геометрию и свойства материала 23 , а живой компонент — кластер культивируемых клеток представляет собой небольшую мягкую сократительную нить, соединенную с субстратом.{-2} \)), так что гидродинамические нагрузки могут быть захвачены с помощью теории тонкого тела 67 . Подробная информация о системе представлена на рис. 2 и в дополнительном примечании 3.
Рис. 2Конструкция биогибридного робота. a Индивидуальное сравнение робота с экспериментальными фотографиями 23 на разных этапах одного плавательного цикла. b Осевое положение центра робота отслеживалось более 20 циклов по сравнению с экспериментальными данными. c Курс оптимизации: Сходимость к оптимальному решению наблюдается через 48 поколений.Оптимизация была ограничена длиной головки в пределах \ ([0,1.927] \, \, \ text {мм} \), радиусом головки в пределах \ ([4,40] \, {\ upmu} \ text {m} \, \ ), радиус хвоста в пределах \ ([4,6.5] \, \ upmu \ text {m} \, \) и расположение ячейки в любой точке вдоль хвоста. Продольный размер бота зафиксирован на уровне \ (L = 1.927 \, \, \ text {mm} \, \), так что длину хвоста можно определить по длине головы. Диапазоны параметров определены с учетом фактической технологичности. d Визуализация как оригинального, так и оптимального дизайна, показывающая конфигурации в состоянии покоя и срединные кинематические огибающие за один период.{-3} \, \, {\ mathrm {Pa}} \ cdot {\ mathrm {s}} \, \). Оптимизированные детали пловца: субстрат имеет длину и радиус \ (190 \, \ upmu \ text {m} \, \) и \ (32.3 \, \ upmu \ text {m} \, \) соответственно. Сократительная клетка прикреплена на расстоянии \ (190 \, \ upmu \ text {m} \, \) от головы, а толщина хвоста составляет \ (4.3 \, \ upmu {\ mathrm {m}} \). e Общий дизайн ходунка с желтыми элементами, представляющими мышечные кольца, и фиолетовыми элементами, представляющими скелет. Экспериментальные изображения адаптированы из 21 . f Моделирование и эксперимент: перемещение бота за 2 секунды при частоте срабатывания 1 Гц. г Визуализация первоначальной и оптимизированной конструкции ходунка. ч Курс оптимизации сходится через 25 поколений. Оптимизация была ограничена модулем Юнга скелета [250–350] кПа, длиной более короткого столба [2,4–3,4] мм и расположением мышечной полосы [0,5–3] мм (расстояние от земли), все из которых выбирались в соответствии с технологичностью изготовления. ограничения. i Динамическое поведение моделируемого (сплошные линии) и экспериментального (маркеры с полосами погрешностей) ходунка с сокращением мышц на разных частотах и сравнение эффективности ходьбы между исходным (сплошные линии) и дальнейшим оптимизированным дизайном (пунктирные линии)
Как наблюдалось на рис.2, мы получаем хорошее качественное и количественное совпадение между моделированием и экспериментами как в оценке плавательного движения (рис. 2а), так и в смещении вперед центра масс бота (рис. 2b).
Имея в руках рабочую модель, мы решаем обратную задачу оптимизации макета бота, чтобы максимизировать его скорость плавания. Чтобы определить оптимальный дизайн, мы объединяем наш решатель с алгоритмом стратегии адаптации-эволюции ковариационной матрицы (CMA-ES, Hansen et al. 68 ).CMA-ES — это алгоритм стохастической оптимизации, который постепенно производит выборку поколений векторов параметров (совокупность ботов, характеризующихся разными макетами) из многомерного распределения Гаусса \ ({\ mathcal {N}} \). Хотя математического доказательства сходимости к глобальному оптимуму нет, CMA-ES доказала свою надежность при решении многомодальных непрерывных задач малой размерности 69,70 и использовалась в ряде инженерных и биофизических приложений 71, 72,73,74 .
Таким образом, мы позволили CMA-ES развить четыре ключевых параметра, которые характеризуют структуру бота — длину головы, радиус головы, радиус хвоста и расположение ячеек — в пределах установленных диапазонов с учетом фактической технологичности. Длина бота остается фиксированной.
Курс оптимизации, показанный на рис. 2c, сходится к оптимальному решению, которое улучшает максимальную скорость исходного пловца в 2,44 раза. Оптимальный дизайн требует более короткой, но широкой головы, мышечных клеток, прикрепленных ближе к голове, и более тонкого на \ (\ sim {\! \!} 38 \% \) хвоста (точные параметры указаны на рис.2). Мы видим, что более длинный (из-за более короткой головы) и более тонкий (таким образом, более гибкий) хвост в оптимальной конструкции обеспечивает больший прогиб изгиба (рис. 2d), что приводит к большему толчку вперед, который ускоряет пловца, в то время как оптимизированная голова вносит свой вклад в уравновешивание переданного углового момента. Отметим, что оптимизатор не выбрал нижнюю границу достижимого радиуса хвоста, что предполагает, что для оптимальной производительности необходим баланс между гибкостью и сопротивлением, связанным с большим отклонением хвоста.Таким образом, этот подход закладывает основу для нового поколения биогибридных плавательных роботов 24 .
В дополнение к моделированию и оптимизации биогибридного пловца, мы также занялись вычислительным дизайном биогибридного ходунка, что привело к изготовлению и тестированию самой большой и самой быстрой мобильной биологической машины (биобота) на сегодняшний день 21 . Унаследовав дизайн биогибридного робота от предыдущей демонстрации 22 , ходунки Pagan-Diaz et al. 21 состоит из асимметричного гидрогелевого каркаса и тканей скелетных мышц, напоминающих отношения мышцы-сухожилия-кости, обнаруженные in vivo.Ходунки работают в ванне с раствором, в которой мышцы подвешиваются и подвергаются электрическому шоку, вызывая сокращения, которые приводят к движению из-за асимметрии и трения. Мы смоделировали эту архитектуру и, ориентируясь на длину бота \ (14 \, \, \ text {мм} \), что примерно в два раза больше, чем предыдущая самая большая попытка, использовали наши модели для разработки нового каркаса и топологического расположения мышц бота. . Решающее значение для конструкции имеет новая топология мышечная ткань (представленная посредством стержневой сборки, рис.2e), в котором тонкая полоска соединяет два кольца, обернутых вокруг ног скелета, для передачи сил сокращения мышц. Сократительное напряжение мышцы (\ ({\ sigma} _ {\ mathrm {m}} \)) было охарактеризовано с помощью эталонных экспериментов 21 и реализовано в моделировании как абсолютное значение синусоидального сигнала с амплитудой \ ({\ sigma } _ {\ text {m}} \). Таким образом, максимальная сила \ ({F} _ {\ text {m}} \), которая действует на мышечную ткань с площадью поперечного сечения \ ({A} _ {\ text {m}} \) и модуль Юнга \ ({ E} _ {\ text {m}} \) может воздействовать на скелет, выражается как
$$ {F} _ {\ text {m}} = {A} _ {\ text {m}} \ left ( \ gamma {\ sigma} _ {\ text {m}} — \ frac {{E} _ {\ text {m}} \ epsilon} {1- \ epsilon} \ right), $$
(1)
, где \ (\ gamma = {A} _ {\ text {act}} / {A} _ {\ text {m}} \) — отношение активной площади поперечного сечения мышцы к общей (определяется в языческом -Diaz et al. 21 ) и \ (\ epsilon \) обозначают деформацию. Второй член справа отражает упругий отклик деформирующейся нити и изменение ее поперечного сечения при ее укорачивании или удлинении. Принимая во внимание свойства гидрогеля (модуль Юнга \ (E \)) и возможности 3D-печати, мы переработали макет целевого робота, изменив жесткость материала, длину ног, топологию мышц и геометрию, пока не получили более быстрый дизайн. Затем этот расчетный план был экспериментально протестирован и продемонстрирован в Pagan-Diaz et al. 21 (рис. 2е). Согласно расчетам, бот способен ходить при различных частотах стимуляции мышц (рис. 2i), при этом максимальная скорость в два раза выше, чем у ранее описанной конструкции 22 .
Здесь мы бросаем вызов нашей вычислительной структуре для дальнейшего улучшения ходунка Pagan-Diaz et al. 21 путем оптимизации скорости, нетривиальная задача, учитывая нелинейное взаимодействие между асимметричным трением, жесткостью каркаса на изгиб и соотношением длин двух стоек.Таким образом, зафиксировав общую длину и ширину ходунка и частоту сокращения мышц на уровне 2 Гц, мы определяем три критических параметра: модуль Юнга скелета, длину более короткого столба и расположение мышечной полосы. Как видно на рис. 2i, недавно определенное оптимальное решение (рис. 2g) локомотирует с удвоенной (\ (\ sim \) 250%) скоростью Паган-Диаз и др. 21 , на всех частотах стимуляции (2 Гц, 1 Гц и 0,5 Гц), благодаря более мягкой соединительной перемычке, соединенной с немного более асимметричными ножками (рис.2г).
В ходе этих исследований мы показали, что наш вычислительный подход может уловить физику мягких роботизированных систем, работающих на клетках и мышцах, и дополнительно оптимизировать их конструкцию для достижения желаемой производительности. Это также показывает, как надежность и универсальность нашего решателя в сочетании с методами обратного проектирования могут быть использованы для создания более эффективных прототипов.
Синтез скользящих змей
Здесь мы используем наш численный подход для выделения принципов проектирования и извлечения широко применимых архитектурных мотивов из сложных биологических систем (в данном случае, змеи с ее замысловатым расположением мускулатуры) в пользу инженерной технологичности и биомеханического понимания .
Была проделана обширная работа по пониманию передвижения змей 12,29,75 , нацеленных на реплики роботов, состоящих из жестко связанных элементов, приводимых в действие серводвигателями 76,77 . Здесь мы проиллюстрировали жизнеспособность полностью мягкой эластичной змеи, смоделированной и разработанной с помощью вычислений, вдохновленной реальными змеями, но эффективно приводимой в действие с помощью небольшого количества групп мышцы-сухожилия для достижения плавного волнообразного движения. Змеи обладают сложной архитектурой, состоящей из сотен перекрывающихся гомологичных латеральных сегментов мышц, каждый из которых охватывает несколько позвонков (рис.3а). Хотя змеи оснащены множеством мускулов для управления различными походками и деформациями тела, мы предполагаем, что для эффективного и плавного скольжения вперед необходимо лишь несколько и, что важно, перекрывающихся исполнительных механизмов. Мы проверяем эту гипотезу, рассматривая упрощенную архитектуру змеи, состоящую из небольшого числа симметричных и антагонистических пар латеральных мышц и сухожилий. Затем мы позволяем CMA-ES определять местоположения и схемы срабатывания, чтобы максимизировать скорость движения змеи.Таким образом, архитектурные мотивы могут свободно появляться, а их характеристики можно сравнить с эталонными симуляциями 64,78,79 и экспериментальными записями 75,80 . В то время как предыдущие справочные исследования позволяли реалистично воспроизводить различные походки с помощью постоянно приводимых в действие упругих балок 64,78,79 , мы подчеркиваем, что наша цель здесь — выявить скрытые принципы архитектурного проектирования и раскрыть их функции для инженерных целей. Здесь это достигается с помощью общего, не зависящего от вида подхода, а не детального анализа функционирования какой-либо конкретной змеиной архитектуры (дополнительное примечание 4).
Рис. 3Эмерджентная мускульная архитектура змеи. a (вверху) Моделирование континуума змеи с непрерывным профилем крутящего момента вдоль однородного тонкого тела 64 . (В центре) Эскиз анатомии латеральной мышцы змеи, выделяющий эпаксиальный мышечный сегмент, состоящий из нескольких мышц и сухожилий (адаптирован и изменен с разрешения Джейн 81 ). (Внизу) Наша упрощенная модель мышечной змеи состоит из податливого континуального тела и антагонистических мышечных сегментов, расположенных между сухожилиями.{я}\). e Сравнение между самой быстрой походкой, наблюдаемой в непрерывном образце 64 , нашей скелетно-мышечной модели и экспериментальных записях быстрых змей, характеризующихся аналогичным числом Фруда 80 (шкала, 0,2 л). f Скорость движения вперед и в поперечном направлении для моделей с постоянным крутящим моментом и опорно-двигательного аппарата. г Волнообразное движение змеи, скользящей в течение одного цикла, иллюстрирующее уровень сокращения каждой мышцы на разных фазах в течение одного периода срабатывания.{-3} \) и модуль Юнга \ (E = 10 \, \, \ text {MPa} \, \) (силиконовая резина средней жесткости)
Тогда наш безногий мягкий робот состоит из конусообразного упругого скелет, смоделированный как нить, и, чтобы сохранить биологическую аналогию, мы измеряем длину змеи в позвонках от 0 (голова) до 100 (хвост). В нашем моделировании три основные группы боковых мышц и сухожилий, ответственные за передвижение (semispinalis-spinalis (SSP-SP), longissimus dorsi (LD) и iliocostalis (IC)), объединены в одну группу — один мышечный пучок, который находится между двумя сухожилия (рис.3а). Два сустава закрепляют экстремумы этих продольных приводов вдоль тела змеи на половине ее радиуса от средней линии позвонка. Несмотря на то, что это упрощает общую архитектуру змеи, она сохраняет ее основные компоненты и позволяет нам проверить, возникают ли естественным образом перекрывающиеся макеты мышц как благоприятные решения. Наконец, мышцы и сухожилия «приклеиваются» к телу, следовательно, подчиняются одной и той же локальной кривизне в ответ на динамику всего тела. Взаимодействие между змеей и землей осуществляется посредством анизотропного трения с использованием модели Газзола и др. 64 , а также экспериментальные коэффициенты трения и число Фруда \ (Fr \) (отношение между силами инерции и трения) в справочниках. {i} \ le 3500 \) Н (соответствует местному крутящему моменту от 0 до \ (\ sim \) 40 Нм, в соответствии с диапазон в Gazzola et al.{я}\). Оптимальный набор параметров, который максимизирует среднюю скорость движения за один период срабатывания, снова определяется через CMA-ES. Эта схема позволяет нам делать значимые сравнения с предыдущими исследованиями 64 , в которых использовался тот же метод оптимизации.
Рассматривая змей с увеличивающимся числом пар мышц (\ (1 \ le n \ le 6 \)), отдельно оптимизированных по скорости, мы показываем в дополнительном примечании 4, что всего четыре мягких продольных привода могут точно приблизиться к идеализированному непрерывному номер 64 , который устанавливает верхнюю границу достижимой скорости.Курс оптимизации 37-го поколения этой четырехмышечной архитектуры представлен на рис. 3b и показывает, как средняя скорость сходится к максимальному значению, совпадающему с верхней границей. Таким образом, показано, что змея, несущая всего четыре группы мышц, работает сравнимо с моделью непрерывного срабатывания. Идентифицированный дизайн демонстрирует группы мышц, которые охватывают примерно 30-40 позвонков (рис. 3d). Это разумно согласуется с биологическими наблюдениями 81 , где основные эпаксиальные мышечные сегменты змеи в общем размахе \ (\ sim \) 27 позвонков (рис.3a, адаптировано из Jayne 81 ). Различия фаз между мышечными группами показаны на рис. 3c. Более того, перекрытие исполнительных механизмов (рис. 3d) последовательно идентифицируется как ключевая особенность, независимо от количества рассматриваемых пар мышц (дополнительное примечание 4). Действительно, неперекрывающиеся архитектуры систематически отбрасывались CMA-ES как субоптимальные (снижение скорости до 60%).
Сравнение динамического поведения Gazzola et al. 64 с нашей идентифицированной моделью, мы наблюдаем, что, несмотря на примерно равные средние скорости движения вперед (\ (\ sim {\ hskip -2pt} 0.{-1} \)), наше мышечно-скелетное представление демонстрирует большие колебания прямой и поперечной скорости (рис. 3f). Это происходит из-за ограниченного количества мышц и отражается в более заметном латеральном смещении кинематики средней линии (рис. 3e). Для сравнения мы дополнительно сообщаем экспериментально зарегистрированные срединные походки кукурузной змеи, самые быстрые, зарегистрированные в Hu and Shelley 80 среди различных видов, характеризуемых \ (Fr \ sim 0,1 \). Наблюдаемая походка очень похожа на наши модели (рис.3д). Тогда удивительно, как тщательная оркестровка распределенного срабатывания (четыре продольные группы мышц) позволяет добиться плавных реалистичных походок, несмотря на свою простоту. Это резко контрастирует с жестким аналогом робота-змеи, оснащенным всего четырьмя серводвигателями, которые в противном случае демонстрировали бы менее изысканное и менее плавное движение.
Это исследование иллюстрирует структуру для упрощения, тестирования и выделения биомеханических принципов из сложных биологических систем, как показано на полностью совместимой, реалистично скользящей и быстрой змейке, состоящей из нескольких простых приводов.Таким образом, путем решения обратной задачи идентифицируется опорно-двигательный аппарат потенциальной мягкой роботизированной змеи, что определяет ее практическое проектирование и производство. Показано, что это приближает идеализированный случай непрерывного срабатывания, подчеркивая роль естественного решения, основанного на перекрывающихся продольных исполнительных механизмах.
Репликация пернатых крыльев
До сих пор мы изучали костно-мышечные схемы, которые собраны из двух ключевых компонентов: источника энергии (мышцы, клетки) и субстрата (кости, эластичные тела), что влечет за собой \ ({\ mathcal {O}) } (10) \) стержни, производящие локомотивные функции на поверхностях или в объемных жидкостях.{3}) \) стержни. Пример исследования здесь служит иллюстрацией способности нашего решателя качественно воспроизводить полномасштабные биологические системы, фиксируя основные черты лежащего в основе биофизического поведения, тем самым обеспечивая доступный инструмент для их понимания in silico.
Было проведено множество исследований для понимания различных биофизических аспектов полета птиц, от моделей мышечной активации для различных режимов полета 82 до геометрических и механических свойств перьев 83 в отношении создания тяги, снижения лобового сопротивления и подавления звука 84 .На основании этих исследований мы рассмотрим динамику строения крыльев голубя (Columba livia). Мы реконструируем перья in silico remiges и моделируем рахис как нити с жесткостью на изгиб \ (EI \) в соответствии с 85 . В зависимости от длины пера к одному стержню прикрепляются \ (\ sim {\! \!} 80 {\!} — {\!} 200 \) зубцов (рис. 4а). Каждый расчетный зубец представляет собой примерно пять реальных зубцов с радиусом, установленным в соответствии с расчетной совокупной жесткостью на изгиб 86 (см. Дополнительное примечание 5.1). Всего к крылу прикреплено 19 перьев, так что общая площадь крыла соответствует биологическим данным 87 . Наша вычислительная модель включает в себя всего \ (\ sim {\! \!} 3000 \) стержней на крыло. Мы рассматриваем четыре мышцы, связанные с плечевым и локтевым суставами, чтобы контролировать приведение в действие и изменение крыла (рис. 4b), с биомеханическими параметрами, адаптированными из человеческого локтевого сустава, из-за отсутствия конкретных измерений. В нашей модели с четырьмя мышцами пара supracoracoideus – pectoralis контролирует дорсовентральный угол плеча, а пара двуглавая мышца – лопатка-мышца контролирует угол локтя во время сгибания – разгибания.Временная эволюция переднезаднего угла возникает в результате динамического взаимодействия между структурой и окружающей средой. Аэродинамические нагрузки оцениваются с помощью модели пониженного порядка, в которой силы масштабируются квадратично с местной скоростью тела (см. Дополнительное примечание 5.2). Хотя эта модель не может охватить сложную нестационарную аэродинамику, связанную с колеблющимся полетом, тем не менее, она дает предварительную оценку. Мы подчеркиваем качественный характер этой конкретной демонстрации.
Рис. 4Махающие оперенные крылья. a Модель пера, состоящего из стержней и зубцов. b Расчетное крыло (справа), состоящее из 3171 нитей (крупный план с нескольких точек зрения, представленных на дополнительном рис. 5), которое имитирует иллюстрацию (слева) анатомии крыла. c Углы локтевого, дорсовентрального и переднезаднего суставов. d Процесс инициирования, при котором крыло поднимается из горизонтального положения, за которым следует одиночный ход вниз и вверх на этапе взлета.{2} \). Дополнительные подробности можно найти в дополнительном примечании 5
Затем мы настроили воспроизведение кинематики трансформации крыльев в течение полного цикла хода в режиме взлета. Сначала мы инициализируем наше моделируемое крыло в прямой, плоской конфигурации (рис. 4d) и на этапе инициации устанавливаем (произвольно) активацию мышц с помощью дополнительного уравнения. 6, чтобы подготовить крыло к фазе хода вниз (рис. 4д, е). Во время фазы движения вниз и вверх характер срабатывания мышц (дополнительные уравнения.7–10) вместо этого основаны на экспериментально зарегистрированных сигналах электромиографии (ЭМГ) 82 (рис. 4f). Поскольку измерения ЭМГ не позволяют определить величину, с которой работают мышцы (только их временные последовательности), мы устанавливаем силу срабатывания мышцы (\ (\ sim \) 10 Н, такой же порядок величины, как у Бивенера и др. 88 , Дополнительное примечание 7.4). Как видно на рис. 4e, наша модель отражает временную эволюцию трех углов сочленения, что качественно согласуется с экспериментальными измерениями 82 .Это нетривиальная задача, учитывая крайне нелинейное взаимодействие между мышечным срабатыванием, пассивной структурной динамикой и аэродинамическими нагрузками. Основное несоответствие наблюдается для угла переднезаднего сустава. Это неудивительно, так как четыре мускула практически не контролируют его, и его временная эволюция возникает в результате общей динамики системы, что делает ее наиболее чувствительной к приближениям моделирования. В этом контексте по-прежнему примечательно, что, несмотря на все приближения, которые неизбежно влечет за собой наша модель, моделирование может качественно отражать общее поведение крыла с максимальным отклонением угла сочленения от экспериментов в \ (\ sim \) 10 °, что сравнимо с вариациями измерений. .
Таким образом, здесь мы продемонстрировали потенциал нашего метода в представлении сложных, гетерогенных биологических структур с высокой степенью детализации для исследования локомотивных функций.
Важность всех режимов деформации
Наконец, отметим, что, хотя роль различных режимов деформации может быть предсказана априори для простых задач, их значение в более сложных гетерогенных архитектурах, взаимодействующих с неопределенными средами, может представлять проблему.В этом свете и для дальнейшего развития аргумента в пользу необходимости фиксировать все моды деформации, мы расширяем наше исследование, чтобы понять, в частности, влияние скручивания и сдвига (часто предполагаемого несущественным) на архитектуры, представленные в этом исследовании, посредством численного скручивания и сдвига. эксперименты по упрочнению на сдвиг. Результаты можно найти в дополнительном примечании 6, где наблюдается взаимодействие с окружающей средой (особенно трение) для возбуждения этих режимов, тем самым влияя на реакцию системы. Кроме того, представлены две демонстрации, функциональность которых критически зависит от режимов скручивания (вспомогательное устройство локтя) и сдвига (скольжение по неровной местности), чтобы подчеркнуть возможность моделирования этих эффектов.
OpenSim — см. Работу
Спортсмены, от обычных футболистов до олимпийских десятиборцев, должны выступать оптимально и без травм. Моделирование может показать, как мышцы организуют такие движения, как прыжки, спринт, удары ногами и езда на велосипеде. Эта информация жизненно важна для определения моделей, которые увеличивают производительность или могут привести к растяжению мышц или перегрузке суставов.
Бег с ног на голову: Выявление вклада мышц в толчок и поддержку во время бега.
Легкоатлеты, кружащие вокруг олимпийского овала, делают бег легким, но бегуны используют сложную комбинацию мышц, чтобы продвигать свое тело вперед при каждом шаге. Сэмюэл Хамнер из Стэнфордского университета возглавляет проект с использованием OpenSim, чтобы понять, какие мышцы отвечают за поддержку тела и ускорение его движения вперед во время бега. Хамнер создал трехмерную модель тела и использовал OpenSim для моделирования бега, которым управляют 92 различные мышцы.
Хамнер и его команда продемонстрировали, что две группы мышц являются основными участниками бега. Когда ступня бегуна впервые касается земли, известная как фаза торможения, тело реагирует на удар ступни, используя четырехглавую мышцу (большие мышцы в передней части бедра), чтобы тормозить поступательное движение тела, а также поддерживать тело, не давая ноге сложиться. Затем, во время фазы движения, когда бегун готовится к отталкиванию, подошвенные сгибатели (икроножные мышцы) вносят наибольший вклад как в поддержку тела, так и в продвижение его вперед.
Имитация бега, управляемая мышцами. Мышцы, активированные на каждой фазе бегового цикла, показаны красным.
Эти первоначальные открытия закладывают основу для дальнейшего исследования травм и заболеваний суставов. В будущем OpenSim можно будет использовать для понимания того, как разные мышечные силы изменяют нагрузку на тазобедренные и коленные суставы. Увеличивают или уменьшают нагрузки на суставы разные схемы бега? Понимание взаимосвязи между мышечными силами беговой походки и силами в бедре и колене необходимо для выявления механизмов травматических повреждений, таких как разрывы подколенного сухожилия, и дегенеративных заболеваний, таких как остеоартрит.
Чтобы узнать больше о модели, использованной в проекте, и симуляторах бега, посетите проект Хамнера на SimTK.org.
Переподготовка мышечной координации на основе моделирования опорно-двигательного аппарата: исследование по снижению нагрузки на колени
Abstract
Люди обычно координируют свои мышцы для достижения целей движения, таких как минимизация затрат энергии. При наличии патологии важность приобретают новые цели, такие как снижение нагрузки на суставы, страдающие остеоартритом, но люди часто не меняют паттерны мышечной координации для достижения этих новых целей.Здесь мы используем моделирование опорно-двигательного аппарата, чтобы определить простые изменения в координации, которым можно научить, обеспечивая обратную связь электромиографической активности для достижения терапевтической цели — уменьшения нагрузки на суставы. Наше моделирование предсказало, что изменение относительной активации избыточных подошвенных сгибателей голеностопного сустава может снизить силу контакта колена во время ходьбы, но было неясно, могут ли люди повторно координировать избыточные мышцы во время такой сложной задачи, как ходьба. С помощью простой биологической обратной связи электромиографической активности здоровые люди снижали соотношение активации икроножной и камбаловидной мышц на 25 ± 15% (p = 0.004). Результирующая модель походки «избегание икроножной мышцы» снизила пик силы контакта колена в поздней стойке, оцененный с помощью моделирования, на 12 ± 12% (p = 0,029). Переподготовка мышечной координации на основе моделирования может быть многообещающим методом лечения остеоартрита коленного сустава и мощным инструментом для оптимизации координации для различных реабилитационных и тренировочных приложений.
Введение
Опорно-двигательная система человека оснащена мышцами, превышающими минимальное количество мышц, необходимых для движения.Эта мышечная избыточность позволяет центральной нервной системе оптимизировать движение для достижения конкретных целей производительности, таких как эффективная ходьба, безопасное лазание или быстрый бег. Огромное количество стратегий координации мышц могут генерировать одно и то же движение, но каждая стратегия приводит к различным внутренним величинам, таким как нагрузка на суставы, метаболические затраты или напряжение сухожилий. Например, считается, что во время ходьбы здоровые люди выбирают стратегию координации, которая оптимизирует показатели производительности, такие как снижение метаболических затрат 1,2 и повышение стабильности 3 .При наличии таких патологий, как остеоартрит, инсульт или повреждение связок, новые показатели эффективности могут приобретать все большее значение. Однако люди не всегда принимают новые стратегии координации, которые оптимизируют эти новые показатели, возможно, из-за отсутствия надежных и своевременных механизмов обратной связи или недостаточного изучения новых схем координации 4 . Моделирование опорно-двигательного аппарата позволяет нам изучить взаимосвязь между нервно-мышечным контролем, кинематикой и клинически значимыми показателями, такими как нагрузка на суставы, чтобы определить более благоприятные стратегии координации, которые людям было бы сложно обнаружить без руководства.В этом исследовании изучается полезность переобучения мышечной координации под управлением моделирования при разработке вмешательства по разгрузке суставов для людей с остеоартритом коленного сустава.
Снижение сжимающей нагрузки на колено является целью многих нехирургических методов лечения остеоартрита коленного сустава из-за взаимосвязи между чрезмерной нагрузкой и симптомами остеоартрита 5 и прогрессированием 6–8 . Во время ходьбы сжимающая контактная сила колена (KCF) в 2-4 раза превышает массу тела (BW; Рисунок 1).От пятидесяти до семидесяти пяти процентов этой силы является реакцией на растягивающие мышечные силы в суставе 9–12 , а оставшаяся сила является результирующей силой обратной динамики, называемой межсегментарной силой. Такие вмешательства, как остеотомия 13 , фиксация 14 и кинематическая переобучение походки 15–17 , направлены на снижение нагрузки на колено за счет изменения межсегментарной силы. Однако эти вмешательства не нацелены, а часто увеличивают вклад крупных мышц в KCF 18 .Кроме того, несмотря на взаимосвязь между нагрузкой на колени и болью, люди с остеоартритом не выбирают естественным образом стратегии координации, которые минимизируют нагрузку на суставы 19–21 . Даже при наличии обратной связи по KCF в реальном времени люди не могут изменить координацию своих мышц, чтобы уменьшить KCF 22 . Это говорит о том, что сложная динамика, связывающая моторный контроль с KCF, а не только отсутствие обратной связи, может ограничивать способность людей с остеоартритом применять стратегию координации, снижающую нагрузку.
Рисунок 1:Относительный вклад межсегментарной силы реакции (результирующая сила из обратной динамики) и мышечных сил в силу контакта колена. Вклады мышечной силы преобладают подколенные сухожилия в первые 10% стойки, квадрицепсы в стойке 10-40% и икроножные мышцы в стойке 40-90%. Компоненты силы контакта колена показаны для 10 здоровых субъектов в этом исследовании с активацией мышц, оцененной путем минимизации суммы квадратов активаций с использованием статической оптимизации.
Моделирование опорно-двигательного аппарата позволяет определить стратегии координации, снижающие KCF. Второй или поздний пик силы контакта с коленом (KCF P2 ) чувствителен к изменениям в координации мышц и теоретически может быть изменен в несколько раз без изменения кинематики 20,23,24 . Стратегия координации, которая сводит к минимуму KCF P2 , может быть достигнута путем изменения активации каждой мышцы нижних конечностей 20,24 , но это решение слишком сложно для изучения.Решения, которые включают более простые изменения в координации мышц, такие как снижение активации икроножной мышцы 11,20,23–25 , вероятно, легче усвоить и все же могут значительно снизить KCF P2 . Хотя моделирование предполагает, что стратегия координации «избегание икроножной мышцы» может эффективно снизить KCF P2 , остается неясным, какие избыточные мышцы должны будут компенсировать снижение активации икроножной мышцы. Более того, неизвестно, смогут ли люди научиться изменять относительную активацию избыточных мышц во время такой сложной задачи, как ходьба.
Электромиография (ЭМГ) биологической обратной связи — эффективный инструмент для исследования пределов волевого моторного контроля. Во время ходьбы биологическая обратная связь передней большеберцовой мышцы или икроножной мышцы может помочь восстановить нормальные моменты тыльного или подошвенного сгибания голеностопного сустава у людей с инсультом или церебральным параличом 26,27 . Люди также могут получить избирательный контроль над несколькими двигательными единицами в течение одного сеанса биологической обратной связи 28,29 , но большинство людей теряют этот избирательный контроль во время выполнения динамических задач 30 .ЭМГ биологическая обратная связь также может помочь в выборе кинематических стратегий, которые изменяют относительную активацию избыточных мышц во время физиотерапевтических упражнений 31,32 . Однако работа по изучению того, могут ли люди изменить относительную активацию избыточных мышц без изменения кинематики во время динамических задач, таких как ходьба, была ограничена.
Целью этого исследования было разработать и внедрить вмешательство по переподготовке мышечной координации, которое учит людей уменьшать силу контакта колена.Сначала мы использовали моделирование опорно-двигательного аппарата, чтобы определить подмножество мышц, на которые нужно воздействовать с помощью биологической обратной связи, которая уменьшит силу контакта колена без изменения кинетики суставов (рис. 2а). Основываясь на результатах моделирования, мы разработали вмешательство биологической обратной связи ЭМГ, чтобы проверить, могут ли здоровые люди научиться изменять координацию избыточных мышц во время ходьбы (рис. 2b). Затем мы использовали моделирование на основе ЭМГ, чтобы оценить, снизили ли участники силу контакта колена при ходьбе с новым паттерном координации (рис. 2c).В более общем плане мы описываем схему использования моделирования для разработки простых вмешательств с биологической обратной связью, которые учат людей новым паттернам координации, которые имеют терапевтический эффект или эффект повышения производительности.
Рисунок 2:(a) Чтобы разработать вмешательство биологической обратной связи для обучения людей ходить без активации икроножной мышцы (икроножной мышцы), мы смоделировали ходьбу здорового взрослого человека, используя как естественную, так и целевую функцию избегания икроножной мышцы (уравнения 1 и 2). в решателе статической оптимизации мышечной избыточности. (b) На основе результатов моделирования мы предоставили пациентам электромиографическую (ЭМГ) биологическую обратную связь, которая проинструктировала их изменить координацию их подошвенно-сгибательных мышц голеностопного сустава. Участники выполнили пять испытаний ходьбы: исходное испытание (естественная ходьба), три испытания с визуальной биологической обратной связью и испытание удержания без обратной связи. Во время всех трех испытаний с обратной связью (FB) визуальная биологическая обратная связь проинструктировала участников снизить соотношение активации икроножной и камбаловидной мышцы (величина столбца).Во время последних двух сессий обратной связи была предоставлена дополнительная обратная связь, в которой участникам предлагалось также снизить среднюю активность икроножных мышц (цвет полоски). Мы проанализировали шаги с последней минуты каждого испытания, в течение которого обратной связи не поступало. (c) Мы создали модели статической оптимизации на основе данных ЭМГ, чтобы оценить влияние модели координации избегания икроножной мышцы на силу контакта колена. Смоделированное соотношение активации икроножной и камбаловидной мышцы было ограничено, чтобы соответствовать соотношению, измеренному с помощью ЭМГ.
Результаты
Дизайн вмешательства, основанный на моделировании
Чтобы разработать вмешательство по переобучению координации, мы стремились понять компенсаторные активации мышц, которые необходимы для создания нормальной кинетики ходьбы с минимальной активацией икроножных мышц (рис. 2а). Мы смоделировали кинетику здоровой ходьбы с двумя различными целевыми функциями статической оптимизации: цель естественной координации, которая является суррогатом метаболической энергии 33,34 (уравнение 1), и цель избегания икроножной мышцы, которая дополнительно снижает активацию икроножной мышцы 20 (уравнение 2) .
Эти симуляции показали, что ходьба без активации икроножной мышцы требует увеличения силы со стороны камбаловидной мышцы, подколенных сухожилий и сгибателей бедра (рис. 3). Повышенная сила камбаловидной мышцы дополняет момент подошвенного сгибания голеностопного сустава, создаваемый икроножной мышцей, но, в отличие от икроножной мышцы, камбаловидная мышца не пересекает колено, что позволяет ей подошвенное сгибание голеностопного сустава без сжатия колена. Повышенная сила подколенных сухожилий дополняет момент сгибания колена, создаваемый икроножной мышцей, но подколенные сухожилия в среднем имеют момент сгибания колена, равный 1.В 7 раз больше, чем икроножная мышца 35 , что позволяет этим мышцам генерировать тот же момент с меньшей силой. Значительные изменения силы, необходимой для подошвенных сгибателей голеностопного сустава, в сочетании с их важной ролью в создании нормальной кинематики ходьбы 36,37 заставили нас сосредоточить вмешательство биологической обратной связи на относительной активации икроножных и камбаловидных мышц. С целью научить участников уменьшать силу икроножной мышцы без уменьшения момента их подошвенного сгибания, мы разработали биологическую обратную связь, которая проинструктировала участников снизить активацию икроножной мышцы и увеличить активацию камбаловидной мышцы.
Рисунок 3:Моделирование идентичной кинетики сустава (n = 1) с естественной (уравнение 1) и статической целевой функцией оптимизации (уравнение 2) с предотвращением икроножной мышцы. Во время поздней стойки мышцы создают моменты подошвенного сгибания голеностопного сустава, сгибания колена и бедра. Паттерн координации избегания икроножной мышцы требует, чтобы камбаловидная мышца и мышцы подколенного сухожилия генерировали больше силы, чтобы компенсировать функции икроножной мышцы, вызывающие сгибание голеностопного сустава и сгибание колена.Благодаря большему моменту сгибания колена (r), подколенные сухожилия могут создавать момент сгибания колена с меньшей силой, чем икроножная мышца, тем самым уменьшая вклад мышц в силу контакта колена. Эта увеличенная сила подколенного сухожилия создает антагонистический момент разгибания бедра, которому противодействует увеличение силы подвздошно-поясничной мышцы. Усредненные по группе мышц моментные руки рассчитывались как средневзвешенное значение моментов рук (подколенные сухожилия: длинная головка и короткая головка двуглавой мышцы бедра, полусухожильная, полуперепончатая мышца; икроножная мышца: медиальная и латеральная головки) на 75% фазы стойки, взвешенные по каждой из них. оптимальная сила мышцы в скелетно-мышечной модели 35 .
Эксперимент по переподготовке мышечной координации
Мы провели эксперимент, чтобы выяснить, могут ли люди научиться изменять относительную активацию икроножных и камбаловидных мышц во время ходьбы при визуальной биологической обратной связи. Во время одного сеанса 10 здоровых взрослых выполнили пять испытаний шестиминутной ходьбы на беговой дорожке с инструментами: исходное испытание, три испытания с обратной связью и испытание удержания (рис. 2b). Во время всех испытаний с обратной связью, гистограмма в реальном времени проинструктировала участников снизить коэффициент активации икроножной и камбаловидной мышцы (уравнение 3): где и — средние линейные огибающие ЭМГ за фазу стойки для медиальных икроножных и камбаловидных мышц, соответственно.Во время последних двух испытаний с обратной связью участникам также была предоставлена обратная связь, чтобы уменьшить их среднюю активацию икроножной мышцы, чтобы предотвратить снижение коэффициента активации только за счет увеличения активации камбаловидной мышцы. Во время испытания удержания участников проинструктировали сохранить усвоенный паттерн координации, но не получили обратной связи.
После первого испытания, в котором участникам была предоставлена обратная связь только о коэффициенте активации, они снизили коэффициент активации на 22 ± 12% (p <0.001), но существенно не уменьшали активацию икроножной мышцы (рис. 4а). Добавляя обратную связь об активации икроножной мышцы во время второго и третьего испытаний с обратной связью, мы стремились научить участников снижать коэффициент активации за счет уменьшения активации икроножной мышцы. После третьего испытания с обратной связью участники снизили активацию икроножной мышцы на 17 ± 19% (p = 0,033) по сравнению с исходным уровнем. Наконец, мы исследовали, могут ли люди сохранять свой новый паттерн координации после шести минут ходьбы без обратной связи.В конце испытания удержания у участников сохранялось снижение коэффициента активации на 25 ± 15% (p = 0,004) и снижение активации икроножной мышцы на 17 ± 21% (p = 0,033). Несмотря на это изменение коэффициента активации, средний момент в голеностопном суставе изменился только на 3 ± 14% (рис. 4e) во время исследования удержания по сравнению с исходным уровнем, что имело тенденцию к статистической эквивалентности в пределах одного базового стандартного отклонения (p = 0,063).
Рисунок 4:(a) Среднее значение (столбец) и стандартное отклонение (столбец ошибки) изменений мышечной активации, измеренных с помощью электромиографии (n = 10).Участники снизили коэффициент активации икроножной (икроножной) и камбаловидной мышцы на 22 ± 12% (p <0,001) после первоначального сеанса обратной связи и сохранили снижение на 25 ± 15% (p = 0,003) в конце испытания удержания. Участники снизили среднюю активацию икроножной мышцы на 17 ± 19% (p = 0,033) после третьего сеанса обратной связи и сохранили снижение на 17 ± 21% (p = 0,033). (b-e) Среднее (линия) и стандартное отклонение (штриховка) активности медиальной икроножной и камбаловидной мышц и механики голеностопного сустава для исходного уровня (базовый.) и удержание (в отставке). Несмотря на изменение коэффициента активации на 25 ± 15% от исходного уровня к испытанию с удержанием, средний момент в голеностопном суставе изменился только на 3 ± 14%, что имеет тенденцию быть эквивалентным исходному уровню в пределах одного базового стандартного отклонения (p = 0,063). .
Имитация контактной силы колена на основе данных ЭМГ
Мы оценили, достигла ли модель координации избегания икроножной мышцы, которую приняли участники, желаемой терапевтической цели: снижение оцененного с помощью моделирования KCF P2 .Используя статическую оптимизацию, мы смоделировали пять циклов походки с последней минуты как базового уровня, так и испытания удержания. Чтобы зафиксировать изменения в активности подошвенно-сгибательной мышцы голеностопного сустава между состояниями, мы ограничили соотношение активации икроножной и камбаловидной мышцы на каждом временном шаге в моделировании, чтобы оно соответствовало соответствующему соотношению, измеренному с помощью ЭМГ (рис. 2с). Смоделированные активации качественно соответствовали паттернам ЭМГ для основных групп мышц, пересекающих колено и лодыжку (рис. 5).
Рисунок 5: Линейные огибающие для электромиографии (ЭМГ)с электромеханической задержкой 40 мс по сравнению с моделированными активациями мышц для исходных испытаний и испытаний удержания для всех участников (n = 10).Несмотря на различия в величине между ЭМГ и моделируемыми активациями икроножной и камбаловидной мышц, относительные изменения между испытаниями согласуются, что указывает на то, что наша методика статической оптимизации на основе ЭМГ зафиксировала изменения активности подошвенно-сгибательной мышцы голеностопного сустава, измеренные с помощью ЭМГ. ЭМГ не сообщала об активации мышц в верхнем ряду при моделировании. Форма, время и изменения моделируемой активации соответствовали ЭМГ для этих мышц, за исключением прямой мышцы бедра.
Чтобы определить эффективность вмешательства, мы проанализировали совместные контактные силы для восьми человек, у которых сохранялось снижение активации икроножной мышцы в поздней стойке во время испытания с удержанием. В среднем эти люди снизили свой KCF P2 на 0,38 ± 0,39 BW (12 ± 12%, p = 0,029) во время испытания удержания по сравнению с исходным уровнем (рис. 6a). Снижение доли икроножной мышцы в KCF на 0,25 ± 0,30 BW было основным фактором снижения KCF P2 (Рисунок 6b).Вопреки прогнозу моделирования вмешательства-дизайна (рис. 3), ни линейная огибающая ЭМГ подколенных сухожилий (рис. 5), ни вклад подколенных сухожилий в KCF (рис. 6b) не увеличиваются во время поздней стойки. Единственным значимым различием в кинематике или кинетике сагиттального сустава нижних конечностей было уменьшение на 0,72 ± 0,63% BW * высоты (31 ± 24%, p = 0,015) момента сгибания коленного сустава в поздней стойке (Рисунок 7). Это открытие согласуется с наблюдаемым нами снижением активации икроножной мышцы, но без изменений активации подколенных сухожилий.
Рисунок 6:(a) Среднее (линия) и стандартное отклонение (штриховка) силы контакта колена для участников (n = 8), которые снизили активацию икроножной мышцы в поздней стойке во время испытания с удержанием. Эти участники снизили свой второй пик силы контакта колена на 0,38 ± 0,39 раза от веса тела (BW), или на 12 ± 12% (p = 0,029) во время испытания удержания, по сравнению с исходным уровнем. (b) Для тех же восьми испытуемых изменение силы контакта колена разбито на компоненты межсегментарной и мышечной силы.Снижение на 0,25 ± 0,30 BW силы икроножной мышцы во время второго пика силы контакта с коленом было основным вкладом в уменьшение силы контакта второго пика. (c) Изменения первой и второй пиковых контактных сил между исходным (базовым) и удерживающим (рет.) Значениями показаны для всех участников (n = 10), с двумя участниками, которые не сохранили снижения в поздней стойке. деятельность gastrocnemius представлена пунктирными линиями. Шесть из восьми человек, которые снизили активацию икроножной мышцы в поздней стойке, снизили свой второй пик силы контакта с коленом, но пять увеличили свой первый пик.
Рисунок 7:Среднее (линия) и стандартное отклонение (затемнение) кинематики и кинетики колена и бедра для участников (n = 8), у которых сохранялось снижение активации икроножной мышцы в поздней стойке во время испытания с удержанием. Во время испытания с удержанием участники ходили с меньшим моментом сгибания колена в поздней стойке на 0,72 ± 0,63% BW * ht (31 ± 24%, p = 0,015). Во время испытания с удержанием наблюдались большие различия в первом пике угла колена и момента. Пиковая кинематика и кинетика бедра существенно не различались во время ранней или поздней стойки.
Обсуждение
Мы разработали методику повторной тренировки координации мышц, которая снижает нагрузку на колени. Сначала мы использовали моделирование опорно-двигательного аппарата, чтобы выявить простые изменения в координации, которые уменьшают силу контакта колена, что послужило основой для разработки вмешательства с биологической обратной связью. С помощью простой биологической обратной связи мышечной активности здоровые люди могли быстро изменить относительную активацию икроножных и камбаловидных мышц, при этом создавая аналогичный момент подошвенного сгибания голеностопного сустава.Это изменение координации привело к снижению на 12% расчетной силы контакта коленного сустава, что может иметь терапевтический эффект для людей с остеоартритом коленного сустава. Эти результаты свидетельствуют о том, что проектирование вмешательств на основе моделирования является многообещающим инструментом для определения новых, обучаемых стратегий координации, которые позволяют достичь терапевтических целей.
Наши результаты основаны на предшествующей работе с биологической обратной связью ЭМГ, демонстрируя, что люди могут быстро изменить координацию избыточных мышц во время сложной задачи с помощью простой обратной связи.Острые изменения координации были выявлены в течение одного посещения статической деятельности 28 , но программы переподготовки клинической координации могут длиться несколько недель 31 . Наши участники снизили коэффициент активации икроножной и камбаловидной мышц во время ходьбы всего через пять минут обратной связи. Это говорит о том, что за одно посещение приложений можно обучить нескольким стратегиям координации, таким как оптимизация с участием человека в цикле, при которой пользователям необходимо быстро адаптироваться к новым условиям 38 .Предыдущая работа также продемонстрировала, что точный контроль отдельных двигательных единиц или мышц легче достигается во время изометрических сокращений 28,30 или контролируемых физиотерапевтических мероприятий 31,32 , но это исследование предполагает, что координацию мышц можно повторно тренировать во время динамической активности. нравится гулять. Необходимы дальнейшие исследования, чтобы определить, каким сложным изменениям координации можно научиться во время функциональной активности.
Pizzolato et al. показали, что во время одного посещения здоровые люди не могли идентифицировать паттерны координации, которые снижали KCF, с обратной связью в реальном времени только по KCF 39 .Это может быть связано со сложностью динамики, которая связывает координацию мышц с KCF. Получив обратную связь об активации двух мышц, большинство наших участников снизили KCF, что подчеркивает важность выбора простых и эффективных целей биологической обратной связи.
Способность паттерна координации избегания икроножной мышцы уменьшать контактную силу колена предполагает, что переобучение координации может быть использовано для уменьшения совместных контактных сил других суставов, страдающих артритом, по всему телу.Снижение веса KCF P2 на 0,38BW или 12% аналогично эффекту совместной разгрузки при потере 15–38% массы тела 40–42 . Снижение KCF P2 аналогично тому, что было достигнуто с помощью кинематических модификаций походки 43,44 или вспомогательных устройств 14,43,45 , но не требует заметных изменений кинематики или образа жизни, которые часто мешают усыновлению пациента 17 , 46 . За счет использования функциональных различий между избыточными мышцами опорно-двигательного аппарата повторная тренировка координации является гибким способом снижения нагрузки.Его можно использовать для переноса нагрузки между отделениями колена или для уменьшения нагрузки на другие суставы, такие как тазобедренный 24 , для которого существует ограниченное количество других вмешательств по разгрузке.
В дополнение к разработке вмешательств для уменьшения силы контакта суставов, моделирование опорно-двигательного аппарата может определить вмешательства по переподготовке координации, которые оптимизируют для других важных клинических показателей и показателей спортивных результатов. Моделирование может определить оптимальные стратегии координации мышц при ходьбе или беге с помощью вспомогательного роботизированного устройства 47,48 .Обеспечение биологической обратной связи ЭМГ на основе моделирования может улучшить естественный процесс моторного обучения, позволяя пользователю устройства быстрее выработать энергетически выгодную стратегию координации. Кроме того, модели мышечной координации, выявленные с помощью моделирования, могут улучшить спортивные результаты. Например, паттерны координации, которые максимизируют расстояние прыжка в длину 49 , могут быть обучены спортсменам с помощью упрощенной биологической обратной связи ЭМГ. Наконец, эта структура может стать важным инструментом профилактики травм и реабилитации.Например, могут быть разработаны новые схемы координации, которые помогут уменьшить напряжение передней крестообразной связки при разрезании или локтевой коллатеральной связки во время подачи бейсбола. Даже после травмы новые паттерны мышечной координации могут помочь нормализовать механику суставов 23 , потенциально делая переобучение координации важной частью посттравматической реабилитации.
Важно понимать ограничения этого исследования. Мы демонстрируем, что здоровые люди могут учиться и сохранять новый паттерн координации в контексте одного посещения, но необходима дальнейшая работа для оценки обучения и удержания в течение длительного времени в условиях свободной жизни.Несмотря на то, что существуют проблемы с повседневной нормализацией ЭМГ, биологическая обратная связь на основе ЭМГ может быть использована как носимое решение для домашних тренировок. Во-вторых, мы показываем возможность переподготовки мышечной координации у молодых, здоровых участников. Людям с остеоартритом может быть сложнее изучить эту модификацию из-за нарушения мышечной силы или двигательного контроля. В-третьих, в среднем наши участники не сохранили свою естественную кинетику ходьбы при принятии координационного паттерна избегания икроножных мышц.Наши отзывы успешно научили людей изменять активность подошвенных мышц голеностопного сустава, сохраняя при этом естественный момент подошвенного сгибания голеностопного сустава; однако мы не давали обратной связи для увеличения активации подколенных сухожилий, что приводило к снижению момента сгибания колена в поздней стойке. Если будущие исследования направлены на сохранение идентичной кинематики и кинетики суставов, необходимо дать дополнительную обратную связь, чтобы проинструктировать участников о достижении всех необходимых компенсаторных изменений в активации мышц. В-четвертых, хотя шесть из восьми субъектов, которые снизили активность икроножной мышцы в поздней стойке, снизили второй пик KCF, пять из этих людей увеличили свой первый пик KCF.В будущих исследованиях, посвященных изучению этой модели походки, следует отслеживать изменения кинетики и мышечной активности во время ранней стойки, которые влияют на первый пик KCF. Наконец, мы оценили изменения в KCF, используя модель опорно-двигательного аппарата, вместо того, чтобы напрямую измерять их с помощью имплантата коленного сустава. Тем не менее, аналогичный подход к статической оптимизации был показан для точного обнаружения вызванных модификацией походки изменений в KCF, измеренных с помощью оснащенного имплантатом коленного сустава 50 . Изменения в моделируемой мышечной активации между естественной походкой и походкой с избеганием икроножных мышц также соответствовали изменениям в ЭМГ (рис. 5), обеспечивая уверенность в точности наших смоделированных изменений в KCF.
Таким образом, при простой биологической обратной связи люди могут учиться и сохранять изменения в структуре мышечной координации во время ходьбы. Мы учили здоровых взрослых изменять активацию избыточных мышц подошвенного сгиба, что уменьшало нагрузку на колени, демонстрируя, что переподготовка координации может быть ценным новым консервативным лечением для разгрузки суставов, страдающих остеоартритом. В более общем плане переподготовка мышечной координации на основе моделирования может быть эффективным способом научить людей новым терапевтическим стратегиям координации.Этот подход основан на адаптируемости нервно-мышечно-скелетной системы человека для оптимизации координации мышц, а также на эффективных приложениях для предотвращения травм, реабилитации и спортивных результатов.
Методы
Дизайн вмешательства на основе моделирования
Предыдущая работа предполагала, что сила контакта колена может быть уменьшена с помощью координационного паттерна избегания икроножной мышцы 20 , но было неясно, какие компенсаторные изменения в активации мышц были необходимы.Чтобы ответить на этот вопрос, мы смоделировали один цикл походки нормальной кинематики ходьбы (здоровый мужчина, скорость 1,25 м / с) с двумя возможными паттернами мышечной координации: естественным паттерном, который минимизировал суррогат для расхода энергии, и паттерном избегания икроножных мышц, который минимально активировал gastrocnemius (рис. 2а). Мы использовали OpenSim 4.0 51,52 и специальную реализацию статической оптимизации в MATLAB R2017b (Mathworks, Inc., Натик, Массачусетс, США) для моделирования и симуляции опорно-двигательного аппарата.
Мы смоделировали нижние конечности и туловище, используя скелетно-мышечную модель, описанную Rajagopal et al. 35 с 21 степенью свободы, 80 исполнительными механизмами опорно-двигательного аппарата для нижних конечностей и тремя идеальными исполнительными механизмами крутящего момента для торса. Модель включала шесть степеней свободы между тазом и землей, три степени свободы вращения между тазом и туловищем, три степени свободы вращения в бедре, одну степень свободы вращения в колене, которая параметризовала оставшиеся степени вращения и поступательного движения. свободы тибиофеморального 53 и пателлофеморального 54 суставов и по одной степени свободы вращения в каждом голеностопном и подтаранном суставах.Мы модифицировали модель, откалибровав кривые зависимости силы от длины пассивной мышцы каждой мышцы так, чтобы моменты в суставах, создаваемые силами пассивных мышц, более точно соответствовали экспериментальным данным 55 . Мы также изменили траектории мышц отводящей мускулатуры бедра, чтобы более точно соответствовать моментным рычагам, оцененным из экспериментов 56,57 , моделей конечных элементов 58 и МРТ 59 (см. Дополнительные материалы). Модифицированная модель была масштабирована, чтобы соответствовать антропометрическим измерениям, полученным в статическом испытании, и виртуальные маркеры на модели были перемещены в соответствии с положениями экспериментальных маркеров во время этого испытания.Кинематика модели оценивалась с помощью инструмента «Обратная кинематика» в OpenSim, который сводит к минимуму ошибку между положениями экспериментальных маркеров и маркеров виртуальной модели. Моменты суставов были рассчитаны с помощью инструмента Inverse Dynamics в OpenSim с кинематикой с фильтрацией нижних частот (6 Гц, 6 -й порядок , нулевой фазовый сдвиг Баттерворта) и силами реакции земли (6 Гц, 4 -й порядок , нулевой фазовый сдвиг. Баттерворта) в качестве входных данных.
Мы разработали специальный алгоритм статической оптимизации в MATLAB, используя OpenSim API, для решения проблемы избыточности мышц.Использовались две целевые функции. Первый минимизировал сумму квадратов активаций мышц (уравнение 1), что является обычно используемым суррогатом метаболических затрат 33,34 . Второй — целевая функция избегания икроножной мышцы с сильно взвешенным штрафом на активацию икроножной мышцы 20 (уравнение 2). Создаваемые мышцами суставные моменты были ограничены, чтобы соответствовать суставным моментам из обратной динамики (уравнение 4) на каждом временном шаге ( t k ). где M ID, j — моменты в суставах обратной динамики для каждой из j степеней свободы (DOF), — моменты рычагов 60 i th привода опорно-двигательного аппарата (MTU) относительно j th DOF, а это силы MTU.Силы MTU были рассчитаны с использованием модели типа Хилла 61 , описанной Millard et al. 62 . Мы аппроксимировали податливость сухожилий, решив уравнение статического равновесия мышц сухожилий (уравнение 5) для длины мышечных волокон, используя длину MTU из текущего шага и активацию из предыдущего шага: где — оптимальная мышечная сила, f T ( l M , l MTU ) — множитель силы сухожилия на длину в зависимости от длины мышечного волокна и длины MTU, α — активация мышцы от 0 до 1, f l ( l m ) — активный множитель силы мышечного волокна на длину, f PE ( l m ) — сила пассивного мышечного волокна. множитель длины, а α ( l m ) — угол перистости мышцы.После решения уравнения 5 для l m ( t k ) с использованием метода Ньютона 62 , мы зафиксировали l m ( t k ) и решили для F MTU ( t k ) как функция проектной переменной α ( t k ) для каждой мышцы (уравнение 6).
Затем мы использовали fmincon в MATLAB для решения задачи статической оптимизации с комбинацией уравнений 4 и 6 в качестве ограничения и либо уравнения 1, либо уравнения 2 в качестве целевой функции.Вычисление статического равновесия в уравнении 5 не учитывает свойство силы-скорости мышцы. Однако в ходе пилотных испытаний мы обнаружили, что решения по статической оптимизации, в которых использовалось податливое сухожилие, но исключали свойство силы-скорости мышцы, приводили к активациям, которые более точно соответствовали ЭМГ, чем решения, которые предполагали жесткое сухожилие, но включали свойство силы-скорости. Это улучшение было особенно заметно в мышцах, таких как икроножная и камбаловидная, сухожилия которых в несколько раз длиннее оптимальной длины мышечных волокон.
Используя мышечные силы из статической оптимизации, мы использовали инструмент анализа реакций суставов в OpenSim для вычисления KCF как силы реакции вдоль продольной оси большеберцовой кости. Мы также сравнили различия в мышечных силах в основных группах мышц, которые создают моменты подошвенного сгибания голеностопного сустава в позднем положении, сгибания колена и бедра: камбаловидной мышцы, икроножной мышцы (медиальная и латеральная головки), подколенных сухожилий (полусухожильной, полуперепончатой, двуглавой мышцы бедра). femoris (длинная и короткая головка), подвздошно-поясничную (подвздошную, поясничную) и прямую мышцу бедра.Наконец, после оценки изменений мышечной силы между паттернами координации, мы решили сосредоточить биологическую обратную связь на двух группах мышц с наибольшими изменениями силы: икроножной и камбаловидной мышцах. Уменьшая активацию икроножной мышцы и увеличивая активацию камбаловидной мышцы, человек теоретически может уменьшить вклад икроножной мышцы в силу контакта колена без изменения чистого момента подошвенного сгибания голеностопного сустава.
Эксперимент по переподготовке мышечной координации
В исследовании приняли участие 11 человек и 10 (4 женщины, 26 ± 4 лет, 22.8 ± 2,1 ИМТ) заполнили его после предоставления информированного согласия на протокол, одобренный Советом по институциональной проверке Стэнфордского университета. Мы включили людей, у которых в прошлом году не было травм нижних конечностей. Перед тем, как люди начали часть исследования, связанную с ходьбой, мы оценили, могут ли наши поверхностные электроды ЭМГ измерять различные сигналы между медиальной икроножной и камбаловидной мышцами. Мы попросили участников выполнить упражнения на подошвенное сгибание стоя и сидя, поскольку эти упражнения вызывают большие изменения в относительной активации икроножных и камбаловидных мышц из-за разной степени сгибания колена 63 .Поскольку наше целевое снижение коэффициента активации икроножной и камбаловидной мышцы во время ходьбы составляло 15%, мы включили только тех участников, которые снизили коэффициент активации не менее чем на 15% во время активности подошвенного сгибания сидя по сравнению с активностью подошвенного сгибания стоя. По этой причине был исключен один участник.
Участники завершили одно посещение лаборатории захвата движения с беговой дорожкой с силовыми инструментами (Bertec Corporation, Колумбус, штат Огайо, США), системой захвата движения с 11 камерами (Motion Analysis Corporation, Санта-Роза, Калифорния, США) и беспроводная наземная система ЭМГ (Delsys Corp., Натик, Массачусетс, США). Мы разместили маркеры с двух сторон на головках 2-й и 5-й плюсневых костей, пяточной кости, медиальной и латеральной лодыжках, медиальных и латеральных надмыщелках бедренной кости, передних и задних верхних подвздошных отростках, акромиальных отростках, клювовидных суставах и на позвонках C7. Маркеры на медиальных надмыщелках бедренной кости и лодыжках были удалены перед испытаниями при ходьбе, и было использовано 16 дополнительных маркеров для помощи в отслеживании конечностей. После случайного выбора ноги для анализа и биологической обратной связи мы поместили девять электродов ЭМГ в одностороннем порядке на камбаловидную мышцу (медиальный аспект), медиальную икроножную мышцу, латеральную икроножную мышцу, переднюю большеберцовую мышцу, двуглавую мышцу бедра, полусухожильная мышца, прямая мышца бедра, медиальная широкая мышца бедра и латеральная широкая мышца бедра.
Перед ходьбой участники выполняли максимальные произвольные сокращения для нормализации ЭМГ, статические и динамические калибровочные испытания, чтобы помочь в масштабировании скелетно-мышечной модели, и подъемы на носки для оценки размещения датчика ЭМГ. После прогулки по беговой дорожке для разминки участники выполняли два изометрических и изокинетических максимальных произвольных сокращения с сопротивлением: сгибание колена лежа и сгибание лодыжки лежа на спине. Затем участники выполнили пять ударов ногами с максимальным усилием сгибанием бедра и пять прыжков на максимальную высоту 64 .Мы рассчитали линейные огибающие ЭМГ с помощью полосовой фильтрации (30-500 Гц, 4 -й порядок , нулевой фазовый сдвиг Баттерворта), выпрямления и фильтрации нижних частот (6 Гц, 4 -й порядок , нулевой фазовый сдвиг Баттерворта). ЭМГ-сигналы. Мы нормализовали все будущие линейные огибающие ЭМГ на максимальное значение для каждой мышцы, измеренное во время любого из максимальных произвольных сокращений. Затем участники выполнили пробную статическую калибровку модели для масштабирования модели и испытания циркумдукции бедра для определения функциональных местоположений центра тазобедренного сустава 65 .Чтобы познакомить участников с анатомией их трехглавых мышц верхней части грудной клетки, мы показали им изображения икроножных и камбаловидных мышц и пальпировали обе мышцы. Чтобы участники могли почувствовать разницу между активацией икроножной и камбаловидной мышц и оценить различия в сигналах ЭМГ, участники выполнили два подхода по 10 подъемов на носки двумя ногами. Участники стояли (бедро и колено под углом 0 °) во время первого подхода, чтобы в первую очередь активировать икроножную мышцу, и сидели (бедро и колено под углом 90 °) с 4.Вес по 5 кг на каждое колено во втором подходе для активации камбаловидной мышцы. Среднее снижение коэффициента активации икроножной мышцы к камбаловидной мышце во время испытания сидя по сравнению с испытанием стоя составило 68% ± 14% для 10 человек, завершивших исследование, и 11% для человека, который был исключен из исследования для невозможность снизить коэффициент активации по крайней мере на 15% во время подошвенного сгибания сидя.
После привыкания к ходьбе на беговой дорожке со скоростью 1,25 мс –1 в течение пяти минут участники выполнили пять пробных шестиминутных испытаний ходьбой: исходное испытание, три испытания с обратной связью и испытание удержания (рис. 2b).Во время испытания базовой ходьбой их проинструктировали ходить естественно. Мы вычислили их исходное соотношение активации икроножной мышцы к камбаловидной мышце (уравнение 3) и линейную огибающую средней ЭМГ икроножной мышцы, усредненной по фазе опоры. Мы усреднили эти значения за последнюю минуту базового исследования и нормализовали измерения в реальном времени по средним базовым значениям в последующих испытаниях. Во время первого испытания с обратной связью мы использовали гистограмму в реальном времени, чтобы проинструктировать участников снизить коэффициент активации как минимум на 15% относительно исходного уровня при сохранении нормальной кинематики ходьбы.Мы проинструктировали их изучить различные стратегии в течение первых четырех минут испытания, сойтись на их наиболее успешной стратегии в течение пятой минуты и сохранить эту стратегию после того, как обратная связь была удалена на шестой минуте. Во время второго и третьего испытаний с обратной связью участников проинструктировали продолжать снижать коэффициент активации ниже целевой линии, которая была установлена либо на 15% -ное снижение от исходного уровня, либо на их среднее снижение от исходного уровня во время предыдущего испытания, в зависимости от того, что было больше.Целевой показатель 15% был выбран в качестве достижимой цели из пилотного тестирования, но адаптивный метод постановки целей позволил достичь все более сложных целей для участников, которые добились успеха во время предыдущего испытания. Во время этих двух последних испытаний участникам была предоставлена дополнительная информация об их средней активности икроножной мышцы, представленная цветом полосы. Мы проинструктировали их снизить коэффициент активации, уменьшив активацию икроножной мышцы, или получить небольшую синюю полосу (рис. 2b). Во время испытания удержания мы удалили обратную связь, но проинструктировали участников следовать схеме координации, которую они усвоили во время испытаний с обратной связью.Мы проанализировали последние 30 шагов шестой минуты всех испытаний. Для анализа мы использовали те же процессы фильтрации и нормализации ЭМГ, что и в эксперименте в реальном времени, и усредняли мышечную активность по продолжительности фазы стойки.
ЭМГ-моделирование силы контакта колена
Мы смоделировали эти экспериментальные данные для оценки кинематики, кинетики и KCF сустава с помощью OpenSim 52 и ранее описанной реализации пользовательской статической оптимизации.Для моделирования были выбраны пять циклов походки из каждого из испытаний исходного уровня и испытания удержания, которые имели наименьшие абсолютные различия в коэффициенте активации по сравнению со средним значением из последних 30 шагов испытания.
Изменения ЭМГ подошвенной мышцы были включены в моделирование статической оптимизации путем ограничения смоделированного отношения активации икроножной мышцы к камбаловидной мышце в соответствии с соотношением, измеренным с помощью ЭМГ. Сначала к линейным оболочкам ЭМГ медиальной икроножной, латеральной и камбаловидной ЭМГ была добавлена электромеханическая задержка 40 мс 66 .Смоделированное соотношение активации медиальной икроножной и камбаловидной мышцы было ограничено, чтобы соответствовать соотношению ЭМГ в пределах 2% (уравнение 7). Аналогичное ограничение было наложено на соотношение активации латеральной икроножной и камбаловидной мышцы.
Для проверки наших расчетов мы качественно сравнили смоделированные активации с линейными огибающими ЭМГ с электромеханической задержкой 40 мс (рис. 5). Для этого сравнения мы вычислили средневзвешенные значения симулированной активации и линейных огибающих ЭМГ для vasti (медиальная широкая мышца бедра и латеральная широкая мышца бедра) и двухсуставных подколенных сухожилий (полусухожильная мышца и длинная головка двуглавой мышцы бедра).Оптимальная мышечная сила из скелетно-мышечной модели использовалась в качестве веса для каждой мышцы.
Мы использовали решения по статической оптимизации и инструмент анализа совместной реакции, чтобы вычислить KCF и разложить его на компоненты мышечной и межсегментарной силы. Мы нашли межсегментарную силу реакции путем вычисления KCF из моделирования со всеми степенями свободы, приводимыми в действие идеальными приводами крутящего момента. Чтобы выяснить вклад различных групп мышц в KCF (рисунок 1, рисунок 6b), мы назначили мышечные силы на основе статической оптимизации подмножеству мышц, сгенерировали оставшиеся чистые суставные моменты с помощью идеальных приводов крутящего момента и вычли межсегментарную силу из вычисленный KCF.Мы определили следующие функциональные группы мышц, пересекающих колени: четырехглавую мышцу (медиальная широкая широкая мышца, средняя широкая мышца бедра, латеральная широкая мышца бедра и прямая мышца бедра), подколенные сухожилия (длинная и короткая головки двуглавой мышцы бедра, полусухожильная, полуперепончатая, тонкая мышца и портняжная мышца), gastrocnemius (медиальная и латеральная гастрокнемии) и растяжимая широкая фасция.
Статистика
Все статистические анализы были выполнены в MATLAB (R2017b), если не указано иное. После тестирования данных на нормальность с помощью теста Шапиро Уилка 67 мы сравнили нормально распределенные данные с использованием парной выборки, двустороннего t-критерия и сравнили данные с ненормальным распределением, используя двусторонний знаковый ранговый критерий Уилкоксона.Для сравнения коэффициента активации и изменений мышечной активации в испытаниях с обратной связью и удержанием мы сообщаем p-значения после контроля ложного обнаружения с помощью R (v3.5.3, R Foundation for Statistical Computing, Вена, Австрия) 68,69 . Мы использовали двусторонний тест на эквивалентность с помощью инструмента, предоставленного Lakens et al. 70 с границами эквивалентности одного базового стандартного отклонения для сравнения среднего момента подошвенного сгибания голеностопного сустава между исходным уровнем и испытанием ретенции.Мы определили пики на кривых угла и момента коленного и тазобедренного суставов как максимальное значение в течение первых 50% фазы стойки и минимальное значение в течение последних 50% фазы стойки. Из-за исследовательского характера оценки углов пиков изменений и моментов между исходным уровнем и удержанием мы не корректировали множественные сравнения. Представленные значения представляют собой среднее ± стандартное отклонение, а α = 0,05.
Вклад авторов
Исследование разработано SDU и SLD. SDU выполнила моделирование опорно-двигательного аппарата, собрала экспериментальные данные и проанализировала результаты.AS консультировал с разработкой программного обеспечения для моделирования. Все авторы оказали помощь в интерпретации данных. SDU подготовил рукопись, и все авторы критически отредактировали и одобрили окончательную рукопись.
Конкурирующие интересы
Стэнфордский университет подал заявку на патент от имени SDU и SLD, описывающий методику переобучения мышечной координации, под названием Электромиографическая обратная связь в реальном времени для изменения мышечной активности во время сложных движений . Патент находится на рассмотрении на момент подачи рукописи.У авторов нет других конкурирующих интересов, которые следует раскрывать.
Благодарности
Авторы хотели бы поблагодарить Ника Бьянко, Кармайкла Онга и Эми Силдер за их советы по моделированию и экспериментам. SDU финансировался за счет стипендии Национального научного фонда (DGE-114747) и стипендии Sang Samuel Wang Stanford Graduate Fellowship из Стэнфордского офиса вице-проректора по последипломному образованию. Эта работа также была поддержана грантом P41 EB027060 Национального института здоровья.
SkyTechSport Симуляторы для бизнеса: тренажерные залы и фитнес
Развлекательная составляющая обязательна для фитнес-центров и оздоровительных клубов. Новая технология SkyTechSport обеспечивает интерактивную и увлекательную тренировку, предлагая вам грандиозную тренировку, затрагивающую все чувства.
- Первое действительно забавное фитнес-оборудование!
- Высокоинтенсивное сердечно-сосудистое выгорание 700-1000 ккал за сеанс
- Задействует как большие группы мышц, так и крошечные мышцы-стабилизаторы.
- Не ограничивает мышцы, обеспечивая естественное движение
- Режим силовых упражнений специально нацелен на рост мышц
- Эффект G-force запускает естественные процессы регенерации тела
- Регулируемые уровни сложности
- Безопасно для травм из-за небольших вертикальных нагрузок
«Я езжу на SkyTechSport два раза в неделю по религиозным причинам.Причина: это на самом деле ВЕСЕЛО. Знаете, как кататься на лыжах.
Ллойд Тейлор,
сценарист и продвинутый лыжник
Деловые кейсы
Клайпеда, Латвия
Оздоровительный клуб EOLA площадью 9000 кв. Футов представляет собой идеальную коммерческую модель SkyTechSport — 19 ‘President. Это средство больше не только для тяги, подъема и бега трусцой, оно привлекает клиентов, которые ценят активный образ жизни, занимаются активными видами спорта или просто устали от однообразных и повторяющихся тренировок.
Anytime Fitness, Сими-Вэлли, Калифорния
Без снега. Без проблем. Anytime Fitness в Сими-Вэлли — первый тренажерный зал в США, предлагающий тренажер для занятий лыжным спортом и сноубордом SkyTechSport.
Это невероятная кардио-тренировка, которая тонизирует мышцы кора, пресса и икры. В Anytime Fitness занятия доступны без участия.
Смотрите захватывающий сюжет от ABC7!
«Лос-Анджелес неизменно находится в авангарде тенденций в области фитнеса и здоровья, и это не исключение.Пришло время обновить тренажерные залы до уровня крутости, и мы начинаем движение здесь. Симулятор горных лыж и сноуборда SkyTechSport подходит для всех возрастов и не похож ни на одну тренировку в Вестсайде ».
Сохаил Абдали, Владелец и президент Anytime Fitness в Сими-Вэлли
Инновационный тренажерный зал XFit
В самом сердце холодной Сибири, недалеко от местного горнолыжного курорта Мекка — Шерегеш, 1700-метровое красивое пространство велнеса получило свою вишенку — самое инновационное и захватывающее из всех тренажеров.
% PDF-1.7 % 194 0 объект > эндобдж xref 194 118 0000000016 00000 н. 0000003544 00000 н. 0000003813 00000 н. 0000003840 00000 н. 0000003889 00000 н. 0000004018 00000 н. 0000004076 00000 н. 0000004574 00000 н. 0000004691 00000 н. 0000004808 00000 н. 0000004925 00000 н. 0000005042 00000 н. 0000005159 00000 н. 0000005276 00000 н. 0000005393 00000 п. 0000005510 00000 н. 0000005627 00000 н. 0000005744 00000 н. 0000005860 00000 н. 0000005975 00000 н. 0000006090 00000 н. 0000006205 00000 н. 0000006321 00000 п. 0000006434 00000 н. 0000006582 00000 н. 0000006721 00000 н. 0000006860 00000 н. 0000007014 00000 н. 0000007156 00000 н. 0000007313 00000 н. 0000007393 00000 н. 0000007473 00000 н. 0000007553 00000 н. 0000007633 00000 н. 0000007714 00000 н. 0000007794 00000 н. 0000007873 00000 п. 0000007953 00000 н. 0000008033 00000 н. 0000008111 00000 п. 0000008189 00000 н. 0000008266 00000 н. 0000008345 00000 н. 0000008423 00000 н. 0000008502 00000 н. 0000008581 00000 н. 0000008659 00000 н. 0000008738 00000 н. 0000008817 00000 н. 0000008895 00000 н. 0000008973 00000 п. 0000009053 00000 п. 0000009133 00000 п. 0000009213 00000 н. 0000009294 00000 п. 0000009374 00000 п. 0000009454 00000 п. 0000009534 00000 п. 0000009614 00000 н. 0000009694 00000 п. 0000009774 00000 н. 0000009854 00000 н. 0000010078 00000 п. 0000010630 00000 п. 0000010942 00000 п. 0000011314 00000 п. 0000011392 00000 п. 0000017622 00000 п. 0000018126 00000 п. 0000018497 00000 п. 0000019417 00000 п. 0000019930 00000 п. 0000020164 00000 п. 0000025917 00000 п. 0000026334 00000 п. 0000026717 00000 п. 0000027010 00000 п. 0000027791 00000 п. 0000028874 00000 п. 0000029959 00000 н. 0000030396 00000 п. 0000033414 00000 п. 0000033709 00000 п. 0000034088 00000 п. 0000034266 00000 п. 0000035343 00000 п. 0000036359 00000 п. 0000036716 00000 п. 0000037768 00000 п. 0000038650 00000 п. 0000061644 00000 п. 0000079312 00000 п. 0000079858 00000 п. 0000080070 00000 п. 0000080365 00000 п. 0000080433 00000 п. 0000081664 00000 п. 0000081903 00000 п. 0000082238 00000 п. 0000082334 00000 п. 0000083990 00000 п. 0000084270 00000 п. 0000084684 00000 п. 0000084754 00000 п. 0000085168 00000 п. 0000085238 00000 п. 0000085296 00000 п. 0000085520 00000 п. 0000085608 00000 п. 0000085699 00000 н. 0000085804 00000 п. 0000085923 00000 п. 0000086022 00000 п. 0000086118 00000 п. 0000086249 00000 п. 0000086342 00000 п. 0000003373 00000 н. 0000002711 00000 н. трейлер ] >> startxref 0 %% EOF 311 0 объект > поток xb«f`g`g` ̀
Мышечные динамические симуляторы для исследования нормальной и патологической походки | Журнал нейроинжиниринга и реабилитации
Yamaguchi GT: Динамическое моделирование опорно-двигательного аппарата. Нью-Йорк, Спрингер; 2001.
Глава Google ученый
Zajac FE: Мышцы и сухожилия: свойства, модели, масштабирование и применение в биомеханике и моторном управлении. Crit Rev Biomed Eng 1989, 17: 359-411.
CAS PubMed Google ученый
Zajac FE, Neptune RR, Kautz SA: Биомеханика и координация мышц при ходьбе человека. Часть I: введение в концепции, передачу мощности, динамику и моделирование. Походка 2002, 16: 215-232. 10.1016 / S0966-6362 (02) 00068-1
Артикул PubMed Google ученый
Zajac FE, Neptune RR, Kautz SA: Биомеханика и координация мышц при ходьбе человека: часть II: уроки динамического моделирования и клинические последствия. Походка 2003, 17: 1-17. 10.1016 / S0966-6362 (02) 00069-3
Артикул PubMed Google ученый
Нептун RR: Компьютерное моделирование и симуляция движений человека. Приложения в спорте и реабилитации. Phys Med Rehabil Clin N Am 2000, 11: 417-34, viii.
CAS PubMed Google ученый
Hatze H: Фундаментальные вопросы, последние достижения и будущие направления миодинамики. J Electromyogr Kinesiol 2002, 12: 447-454. 10.1016 / S1050-6411 (02) 00038-X
CAS Статья PubMed Google ученый
Панди MG: Компьютерное моделирование и симуляция движений человека. Annu Rev Biomed Eng 2001, 3: 245-273. 10.1146 / annurev.bioeng.3.1.245
CAS Статья PubMed Google ученый
Shelburne KB, Pandy MG, Anderson FC, Torry MR: Картина силы передней крестообразной связки при нормальной ходьбе. Дж. Биомех 2004, 37: 797-805. 10.1016 / j.jbiomech.2003.10.010
Статья PubMed Google ученый
Shelburne KB, Pandy MG, Torry MR: Сравнение поперечных сил и нагрузки на связки в здоровом колене и колене с дефицитом ACL во время ходьбы. Дж. Биомех 2004, 37: 313-319. 10.1016 / j.jbiomech.2003.07.001
Статья PubMed Google ученый
Piazza SJ, Delp SL: Трехмерное динамическое моделирование движения полного эндопротезирования коленного сустава во время выполнения задачи повышения. J Biomech Eng 2001, 123: 599-606. 10.1115 / 1.1406950
CAS Статья PubMed Google ученый
Caruntu DI, Hefzy MS: Трехмерное анатомическое динамическое моделирование человеческого колена, включая тибио-бедренные и пателло-бедренные суставы. J Biomech Eng 2004, 126: 44-53. 10.1115 / 1.1644565
Артикул PubMed Google ученый
Halloran JP, Petrella AJ, Rullkoetter PJ: Явное конечно-элементное моделирование механики тотального эндопротезирования коленного сустава. Дж. Биомех 2005, 38: 323-331.10.1016 / j.jbiomech.2004.02.046
Статья PubMed Google ученый
Bei Y, Fregly BJ: Многотельное динамическое моделирование механики контакта с коленом. Med Eng Phys 2004, 26: 777-789. 10.1016 / j.medengphy.2004.07.004
PubMed Central Статья PubMed Google ученый
Фрегли Б.Дж., Сойер В.Г., Харман М.К., Бэнкс С.А.: Расчетное прогнозирование износа при полной замене коленного сустава на основе кинематики in vivo. Дж. Биомех 2005, 38: 305-314. 10.1016 / j.jbiomech.2004.02.013
Статья PubMed Google ученый
Neptune RR, Sasaki K: Создание силы подошвенного сгибателя голеностопного сустава является важным фактором, определяющим предпочтительную скорость перехода от ходьбы к бегу. J Exp Biol 2005, 208: 799-808. 10.1242 / jeb.01435
Артикул PubMed Google ученый
Sasaki K, Neptune RR: Механическая работа мышц и использование упругой энергии во время ходьбы и бега с близкой к предпочтительной переходной скорости походки. Gait Posture 2005, в печати.
Google ученый
Сасаки К., Нептун RR: Различия в мышечной функции при ходьбе и беге с одинаковой скоростью. J Biomech 2005, в печати.
Google ученый
Hreljac A: Предпочтительные и энергетически оптимальные скорости перехода походки при движении человека. Med Sci Sports Exerc 1993, 25: 1158-1162.
CAS Статья PubMed Google ученый
Hreljac A: Детерминанты скорости перехода походки при движении человека: кинематические факторы. J Biomech 1995, 28: 669-677. 10.1016 / 0021-9290 (94) 00120-S
CAS Статья PubMed Google ученый
Прилуцкий Б.И., Грегор Р.Дж.: Действия мышц, связанные с махами и опорой, по-разному запускают переходы человека-бега и бега-ходьбы. J Exp Biol 2001, 204: 2277-2287.
CAS PubMed Google ученый
Райт И.К., Нептун Р.Р., ван ден Богерт А.Дж., Нигг Б.М.: Влияние податливости и гибкости голеностопного сустава на растяжение связок голеностопного сустава. Med Sci Sports Exerc 2000, 32: 260-265.10.1097 / 00005768-200002000-00002
CAS Статья PubMed Google ученый
Райт И.К., Нептун Р.Р., ван ден Богерт А.Дж., Нигг Б.М.: Влияние положения стопы на растяжение связок голеностопного сустава. Дж. Биомех 2000, 33: 513-519. 10.1016 / S0021-9290 (99) 00218-3
CAS Статья PubMed Google ученый
Маклин С.Г., Хуанг X, Су А., Ван ден Богерт А.Дж.: Биомеханика в сагиттальной плоскости не может повредить ПКС во время обрезания в сторону. Clin Biomech 2004, 19: 828-838. 10.1016 / j.clinbiomech.2004.06.006
Статья Google ученый
Андерсон Ф.К., Пэнди MG: Динамическая оптимизация ходьбы человека. J Biomech Eng 2001, 123: 381-390. 10.1115 / 1.1392310
CAS Статья PubMed Google ученый
Дэви Д.Т., Оду М.Л .: Метод динамической оптимизации для прогнозирования мышечных сил в фазе качания походки. Дж. Биомеханика 1987, 20: 187-201. 10.1016 / 0021-9290 (87)-1
CAS Статья Google ученый
Yamaguchi GT, Zajac FE: Восстановление естественной походки без посторонней помощи пациентам с параличом нижних конечностей с помощью функциональной нервно-мышечной стимуляции: исследование с компьютерным моделированием. IEEE Trans Biomed Eng 1990, 37: 886-902. 10.1109 / 10.58599
CAS Статья PubMed Google ученый
Чоу CK, Джейкобсон DH: Изучение передвижения человека с помощью оптимального программирования. Math Biosci 1971, 10: 239-306. 10.1016 / 0025-5564 (71)
-9
Артикул Google ученый
Gerritsen KG, van den Bogert AJ, Hulliger M, Zernicke RF: Внутренние свойства мышц облегчают локомоторный контроль — исследование с компьютерным моделированием. Управление двигателем 1998, 2: 206-220.
CAS PubMed Google ученый
Saunders JBDCM, Inman VT, Eberhart HD: Основные детерминанты нормальной и патологической походки. JBJS 1953, 35-A: 543-558.
CAS Google ученый
Гард С.А., Чайлдресс DS: Влияние сгибания колена в фазе опоры на вертикальное смещение туловища при нормальной ходьбе. Arch Phys Med Rehabil 1999, 80: 26-32. 10.1016 / S0003-9993 (99)
-9CAS Статья PubMed Google ученый
Ortega JD, Farley CT: Сведение к минимуму вертикального движения центра масс увеличивает метаболические затраты при ходьбе. J Appl Physiol 2005.
Google ученый
Pandy MG, Berme N: Количественная оценка детерминант походки во время одиночной стойки с помощью трехмерной модели — Часть 1.Походка нормальная. Дж. Биомех 1989, 22: 717-724. 10.1016 / 0021-9290 (89) -5
CAS Статья PubMed Google ученый
Neptune RR, Zajac FE, Kautz SA: Требования к механической работе мышц во время нормальной ходьбы: энергетические затраты на поднятие центра масс тела значительны. Дж. Биомех 2004, 37: 817-825. 10.1016 / j.jbiomech.2003.11.001
CAS Статья PubMed Google ученый
Mochon S, McMahon TA: Баллистическая ходьба. Дж. Биомеханика 1980, 13: 49-57. 10.1016 / 0021-9290 (80)-X
CAS Статья Google ученый
Александр РМ: Энергосберегающие механизмы при ходьбе и беге. J Exp Biol 1991, 160: 55-69.
CAS PubMed Google ученый
Neptune RR, Kautz SA, Zajac FE: Вклад отдельных подошвенных сгибателей голеностопного сустава в поддержку, продвижение вперед и начало движения во время ходьбы. Дж. Биомех 2001, 34: 1387-1398. 10.1016 / S0021-9290 (01) 00105-1
CAS Статья PubMed Google ученый
Anderson FC, Pandy MG: Вклад отдельных мышц в поддержку нормальной ходьбы. Походка 2003, 17: 159-169.10.1016 / S0966-6362 (02) 00073-5
Артикул PubMed Google ученый
Neptune RR, Zajac FE, Kautz SA: Мышечная сила перераспределяет сегментарную силу для движения тела во время ходьбы. Походка 2004, 19: 194-205. 10.1016 / S0966-6362 (03) 00062-6
CAS Статья PubMed Google ученый
Райли П.О., Делла Кроче У., Керриган, округ Колумбия: Пропульсивная адаптация к изменению скорости походки. Дж. Биомех 2001, 34: 197-202. 10.1016 / S0021-9290 (00) 00174-3
CAS Статья PubMed Google ученый
Neptune RR, Kautz SA, Zajac FE: Комментарии к «Движущей адаптации к изменению скорости походки». Дж. Биомех 2001, 34: 1667-1670. 10.1016 / S0021-9290 (01) 00093-8
CAS Статья PubMed Google ученый
Piazza SJ, Delp SL: Влияние мышц на сгибание в коленях во время фазы качания походки. Дж. Биомех 1996, 29: 723-733. 10.1016 / 0021-9290 (95) 00144-1
CAS Статья PubMed Google ученый
Anderson FC, Goldberg SR, Pandy MG, Delp SL: Вклады мышечных сил и кинематики отталкивания пальцев в максимальное сгибание колена во время фазы качания при нормальной походке: анализ индуцированного положения. Дж. Биомех 2004, 37: 731-737. 10.1016 / j.jbiomech.2003.09.018
Статья PubMed Google ученый
Goldberg SR, Anderson FC, Pandy MG, Delp SL: Мышцы, влияющие на скорость сгибания колена при двойной опоре: последствия для походки с скованным коленом. Дж. Биомех 2004, 37: 1189-1196. 10.1016 / j.jbiomech.2003.12.005
Статья PubMed Google ученый
Райли П.О., Керриган, округ Колумбия: Кинетика жесткой походки: анализ индуцированного ускорения. IEEE Trans Rehabil Eng 1999, 7: 420-426. 10.1109 / 86.808945
CAS Статья PubMed Google ученый
Райли П.О., Керриган, округ Колумбия: Крутящее действие двусуставных мышц в период качания при походке с неподвижными ногами: анализ прямой динамической модели. Дж. Биомех 1998, 31: 835-840.10.1016 / S0021-9290 (98) 00107-9
CAS Статья PubMed Google ученый
Goldberg SR, Ounpuu S, Delp SL: Важность начальных условий фазы качания при походке с жесткими коленями. Дж. Биомех 2003, 36: 1111-1116. 10.1016 / S0021-9290 (03) 00106-4
Артикул PubMed Google ученый
Higginson JS, Zajac FE, Neptune RR, Kautz SA, Delp SL: Вклад мышц в поддержку походки у человека с постинсультным гемипарезом. J Biomech 2005, в печати.
Google ученый
Siegel KL, Kepple TM, Stanhope SJ: Использование индуцированного ускорения для понимания стабильности колена во время походки людей с мышечной слабостью. Gait Posture 2005, в печати.
Google ученый
Арнольд А.С., Андерсон Ф.К., Панди М.Г., Делп С.Л.: Мышечный вклад в разгибание бедра и колена во время фазы опоры на одну конечность при нормальной походке: основа для исследования причин походки приседания. Дж. Биомех 2005, 38: 2181-2189. 10.1016 / j.jbiomech.2004.09.036
Статья PubMed Google ученый
Thelen DG: Регулировка параметров модели механики мышц для имитации динамических сокращений у пожилых людей. J Biomech Eng 2003, 125: 70-77. 10.1115 / 1.1531112
Артикул PubMed Google ученый
Lloyd DG, Besier TF: Модель опорно-двигательного аппарата на основе ЭМГ для оценки мышечных сил и моментов в коленных суставах in vivo. Дж. Биомех 2003, 36: 765-776. 10.1016 / S0021-9290 (03) 00010-1
Артикул PubMed Google ученый
Манал К., Бьюкенен TS: Однопараметрическая модель нейронной активации к мышечной активации: оценка изометрических суставных моментов по электромиограммам. Дж. Биомех 2003, 36: 1197-1202.10.1016 / S0021-9290 (03) 00152-0
Артикул PubMed Google ученый
Гарнер Б.А., Панди М.Г.: Оценка свойств сухожилий в верхней конечности человека. Энн Биомед Eng 2003, 31: 207-220. 10.1114 / 1.1540105
Артикул PubMed Google ученый
Asakawa DS, Blemker SS, Rab GT, Bagley A, Delp SL: Трехмерная геометрия мышцы-сухожилия после переноса сухожилия прямой мышцы бедра. J Bone Joint Surg Am 2004, 86-A: 348-354.
PubMed Google ученый
Блемкер С.С., Пинский П.М., Delp SL: Трехмерная модель мышцы выявляет причины неравномерного напряжения двуглавой мышцы плеча. Дж. Биомех 2005, 38: 657-665. 10.1016 / j.jbiomech.2004.04.009
Статья PubMed Google ученый
Blemker SS, Delp SL: Экскурсии волокон прямой мышцы бедра и широкой мышцы бедра, спрогнозированные с помощью трехмерных моделей мышц. J Biomech 2005.
Google ученый
Blemker SS, Delp SL: Трехмерное представление сложной архитектуры и геометрии мышц. Энн Биомед Eng 2005, 33: 661-673. 10.1007 / s10439-005-1433-7
Артикул PubMed Google ученый
Телен Д.Д., Ревальд С.А., Асакава Д.С., Сангер Т.Д., Делп SL: Аномальное соединение моментов колена и бедра при максимальных нагрузках у людей с церебральным параличом. Мышечный нерв 2003, 27: 486-493. 10.1002 / mus.10357
Артикул PubMed Google ученый
Riewald SA, Delp SL: Действие прямой мышцы бедра после переноса дистального сухожилия: вызывает ли оно момент сгибания колена? Dev Med Child Neurol 1997, 39: 99-105.
CAS Статья PubMed Google ученый
Lundberg A: Кинематика голеностопного сустава и стопы. Рентгеновская стереофотограмметрия in vivo. Acta Orthop Scand Suppl 1989, 233: 1-24.
CAS Статья PubMed Google ученый
Reinbolt JA, Schutte JF, Fregly BJ, Koh BI, Haftka RT, George AD, Mitchell KH: Определение кинематических моделей многосуставных суставов для конкретного пациента посредством двухуровневой оптимизации. Дж. Биомех 2005, 38: 621-626.