Тренажер для сведения и разведения ног: Тренажер сведение-разведение ног сидя 2 в 1 Avenir AV217/80 с весом 80 кг в Омске
Тренажер сведение-разведение ног сидя 2 в 1 Avenir AV217/80 с весом 80 кг в Омске
Сведение-разведение ног сидя 2 в 1 80 кг AV217/80
Спортивный тренажёр «Сведение-разведение ног сидя 2 в 1 80 кг AV217/80» входит в группу грузоблочные тренажёры и категорию профессиональных или коммерческих. Он в основном используется в спортивных залах и клубах и применяется для изолированной тренировки мышц внутренней и наружной стороны бёдер. При сведении экстра нагрузку получают подвздошно-поясничная и гребенчатая мышцы, а при разведении — большая ягодичная и напрягатель широкой фасции. Благодаря некоторым особенностям дизайна, а также качеству узлов и материалов, на этой спортивной машине можно интенсивно тренироваться до 12 часов в день.
Особенности тренажёра AV217/80
- AV217/80 в первую очередь состоит из рамы, целиком сваренной из железной прямоугольной в сечении трубы размерами 80х40х3 миллиметра.
К вертикальной части рамы приварена жёсткая конструкция в виде стула с высокой спинкой.
- Все мягкие части (сиденье, спинка, опорные подушки) вырезаны из многослойной фанеры и прочного пенополиуретана и обиты добротным кожзаменителем.
- Блок весовой на грузки представляет собой две вертикальные зеркально отполированные направляющие из нержавеющей стали диаметром 25 мм, по которым бесшумно, благодаря поливинилхлоридным втулкам, перемещаются пятнадцать металлических пластин по 5 килограмм каждая. Сквозь все пластины проходит вертикальный металлический шток с отверстиями и при помощи штыревого фиксатора позволяет настраивать вес поднимаемого во время упражнения груза.
- Поскольку это комбинированное устройство, которое предназначено как для сведения, так и для разведения, оно оснащено сложной системой вертикальных и горизонтальных шкивов и копиров, позволяющей легко переключать режим пользования.
- Опорные подушки тоже имеют свой механизм переключения для расположения на наружной или на внутренней стороне бедра.
- Усилие с грузоблока на рабочие рычаги с подушками передаётся при помощи стального троса сечением 5 мм в ПВХ-оболочке.
- На рабочих рычагах для удобства спортсмена имеются покрытые резиной ручки и упоры для стоп.
- Основание тренажёра оснащено стальными опорами из толстой стальной пластины с отверстиями для крепления к полу.
- Металлические детали окрашены полимерной краской.
- Стандартный цвет покрытия черный.
- Цвет обивки чёрный.


Габариты изделия Д х Ш х В (мм): 1504 x 770 x 1570
Трансп.габариты Д х Ш х В (мм): 1504 x 770 x 1570
Вес стека (кг): 80
Макс.вес пользователя (кг): 180
тренажер для мышц ног
Тренажер механотерапевтический HUR Rehabilitation 5520 сведения и разведения ног
Описание
Тренажёр включает в себя две функции. Первая функция — сведение ног для тренировки внутренних (приводящих) мышц бёдер. Вторая функция — разведение ног — позволяет тренировать внешние (отводящие) мышцы бёдер и ягодичные мышцы.
Тренажёр двойной функции — сведения и разведения ног на проработку внутренних и внешних ножных мышц снабжён ограничителями амплитуды движения и возможностью провести силовой тест.
Тренажёр с двойной функцией позволяет экономить рабочую площадь в зале и снизить затраты клиники или больницы, т.к. при покупке одной тренировочной машины приобретаются функции и возможности двух машин.
Уникальная Система Естественной Передачи Усилия (Natural Transmission )– способ формирования рабочей нагрузки на тренажёрах HUR. Нагрузка поступает на тело не равномерно и не линейно, как в случае с грузовыми тренажёрами, а с постепенным нарастанием и постепенным угасанием, в соответствии с работой мышц человека. Из-за этого почти не вовлекаются в работу суставы и соединительные ткани, как происходит в грузовых тренажёрах, а нагрузка ложится только на мышечные волокна
В HUR Rehabilitation Smart помимо тренажера входит система смарт-карт.
Функции смарт-карты позволяют легко использовать и контролировать тренировочную программу, назначать и контролировать упражнения, подходы, количество, даёт биологическую обратную связь – ЧСС во время выполнения упражнения, настраивает тренажёр для действий пользователя, запоминает действия/результаты движений/показатели ЧСС пользователя и передаёт на центральный компьютер для проверки и контроля. Инновационный компонент тренажёров HUR — возможность для постоянных обновлений программы. Лёгкое обновление на дистанции за счёт отправки файлов. Система Смарт является настоящей компьютерной программой с разнообразием действий. Кроме назначения упражнений/обратной тренировочной связи позволяет управлять клиентским потоком клиники, вести отдельных пользователей и объединять их в группы, назначать и ограничивать время посещений.
Инновационный компонент тренажёров HUR — возможность для постоянных обновлений программы. Лёгкое обновление на дистанции за счёт отправки файлов. Система Смарт является настоящей компьютерной программой с разнообразием действий. Кроме назначения упражнений/обратной тренировочной связи позволяет управлять клиентским потоком клиники, вести отдельных пользователей и объединять их в группы, назначать и ограничивать время посещений.
Выдаёт подробные отчёты, сравнения во времени.
Возможна работа в «облаке».
Все тренажёры со смарт-картой могут использоваться и без неё.
Выбор цвета обивки
7 стандартных вариантов (синий, зелёный, красный, лайм, коричневый, чёрный, бежевый, а также 5 вариантов с дополнением серой полосы (вставки) — чёрный с серой полосой, синий с серой полосой, зелёный с серой полосой, красный с серой полосой, лайм с серой полосой) и также возможен любой цвет обивки на заказ.
Выбор цвета рамы
3 стандартных варианта (белый, светло-серый, чёрный) и также возможен любой цвет рамы на заказ.
Размеры:
Ширина (см): 90
Длина (см): 120
Высота (см): 130
Вес (кг): 75
Тренажер механотерапевтический HUR Rehabilitation 5520 сведения и разведения ног по отличной цене в Санкт-Петербурге от компании Атриум-Медикал. На нашем сайте представлены характеристики, описания и информация о покупке. Купите Аппараты механотерапии с доставкой.
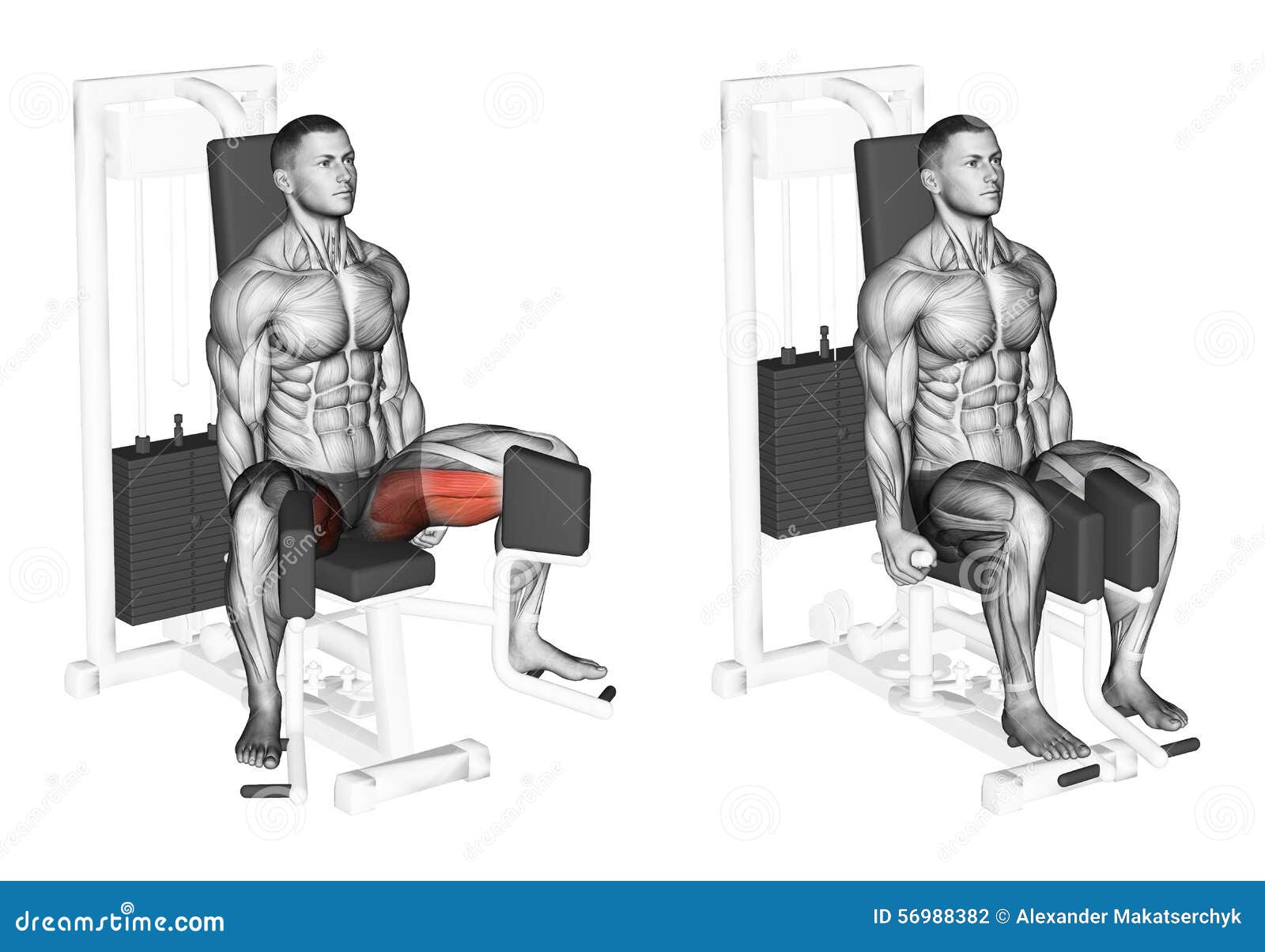
Сведение и разведение ног в тренажёре. Тренажёрный зал.
Это самый любимый тренажёр девушек и женщин. Они выполняют эти упражнения, думая что таким образом смогут изменить форму наружной поверхности бедра (разведения) и форму внутренней поверхности бедра (сведения).
А что, очень лёгкий тренажёр, садишься себе и не напрягаясь разводишь ноги без особого труда. Чем легче тренажёр, тем меньше результат от него.
Если бы всё так было просто. Посмотрите статью проблемные зоны.
А в этой статье я вам поясню почему выполнение этих упражнений пустая трата времени. И почему инструктора дают эти упражнения девушкам и женщинам.
Обычно сведения и разведения делаются с целью повлиять на проблемные зоны и вторая цель это укрепить те мышцы, которые тренируются этим упражнением.
Если цель только укрепить внешнюю или внутреннюю поверхность бедра, тогда безусловно от регулярных тренировок она укрепится. Но не ждите, чтобы бёдра уменьшились или увеличились. Или от этого упражнения сойдёт жир на этих местах. Этого не произойдёт. Почему??1. Жир не уходит с поверхности той мышцы которую мы тренируем. Читайте статью проблемные зоны.
2. Приводящие и портняжная мышцы бедра (внутренняя поверхность) довольно маленькие, а мы знаем чем меньше мышцы, тем труднее их увеличить.
3. Само по себе эти упражнения слишком лёгкие для мышц и не оказывают нужного воздействия для того, что бы мышцы изменились или приобрели желаемую форму.
Возможно инструктор сам не до конца разобрался в этом вопросе.
Гораздо легче дать эти упражнениям девушкам, чем долго объяснять что это упражнение бесполезное.
А где же выход спросите вы. Что делать с проблемными зонами?
Выход есть, просто многие о нём не знают. Нужно делать базовые упражнения.
Если вам нужно увеличить внешнюю поверхность бедра можно делать приседания со штангой на плечах. Или приседать в гакк — машине. Самое главное ноги ставить как можно уже. Тогда будет приличная нагрузка на внешнюю часть бедра.
Но ведь большинство девушек и женщин хотят уменьшить эти места. Они даже называются проблемные зоны, потому что вызывают проблемы. Людям не понятно что можно с этим явлением сделать.
Людям не понятно что можно с этим явлением сделать.
Что бы уменьшить галифе или внутреннюю поверхность бедра, совсем не нужно тренировать эти мышцы на тренажёрах. В этом случае помогут интервальные тренировки.
Только помните что наш организм или весь худеет, или весь поправляется.
Поэтому уменьшив галифе и внутреннюю поверхность бедра вы похудеете во всех местах и на животе и плечевой пояс похудеет.
Нужно знать, что форму проблемных зон вы изменить не сможете. Увеличить — да. Уменьшить — да. А форма какой была, такой и останется.
Составлю вам программу тренировок.
Ещё минус этих тренажёров в том что они блочные, т. е. Груз висит на тросике. И нам очень трудно подобрать нужный вес. Например вы уже «выросли» из веса в 20 кг. И вам вполне бы подошёл вес 22 кг. А вес можно увеличить только на 10 кг.
Тренажер для ног Leg Magic в Уфе в клубе Fitness Woman
Занимаясь на Leg Magic, вы совершаете всего два вида упражнений. От вас требуется лишь сведение и разведение ног стоя на тренажере.
По мнению создателей Leg Magic считается, что принцип сведения и разведения ног способствует объединению всего полезного от кардио упражнения и силовых нагрузок. Таким образом, достигается одновременное сжигание жира и эффективное подтягивание мышц. Тренажер для ног leg magic — упражнения против жира Начнем с того, что зона ваших бедер и ягодиц имеет довольно значительную прослойку жира. При соблюдении какой либо диеты у вас худеют грудь, лицо и руки, но вот нижняя часть тела категорически отказывается от избавления. В таком случае Leg Magic не послужит вам в помощь. И даже при условии, что ваши тренировки будут длиться дольше положенных десяти минут, потраченной энергии будет не достаточно для активизации процесса похудения.
Для фигуры по типу «Груши» необходима не подтяжка мышц, а усиленная коррекция мышечного корсета. Идеальным началом для процесса похудения будут упражнения из комплексов калланетики и пилатеса. Благодаря выполнению упражнений из этих комплексов происходит ускорение метаболизма, что способствует уменьшению прослойки жира в проблемных зонах. Так же с их помощью, возможно, предотвратить уменьшение объемов груди и рук. А еще с их помощью вы значительно укрепите свою осанку. А при наличии ровного позвоночника гарантируется улучшение кровообращения в области бедер. Через пару месяцев после начала тренировок необходимо разнообразить их кардио упражнениями, такими как плавание и эллиптический тренажер. И важно запомнить, что минимальное количество простых углеводов в вашем питании является основой стратегии в борьбе с полными бедрами.
Благодаря выполнению упражнений из этих комплексов происходит ускорение метаболизма, что способствует уменьшению прослойки жира в проблемных зонах. Так же с их помощью, возможно, предотвратить уменьшение объемов груди и рук. А еще с их помощью вы значительно укрепите свою осанку. А при наличии ровного позвоночника гарантируется улучшение кровообращения в области бедер. Через пару месяцев после начала тренировок необходимо разнообразить их кардио упражнениями, такими как плавание и эллиптический тренажер. И важно запомнить, что минимальное количество простых углеводов в вашем питании является основой стратегии в борьбе с полными бедрами.
Тренажер для ног leg magic — упражнения против дряблости Если ваша основная проблема заключена не в наличии лишних жировых отложений, а в вялости и дряблости мускулатуры, обвисших ягодицах и наличии целлюлита то способом решить вашу проблему будут занятия на Leg Magic. При условии, что вы новичок в спорте, то понадобится не менее трех месяцев для изучения техники самостоятельно.
Тренажер для сведения и разведения ног Haukka K265 «» ГАРАНТИЯ, цена 30524 грн
Тренажер для сведения и разведения ног Haukka K265″» ГАРАНТИЯ
Сведение и разведние ног для приводящих и отводящих мышц бедра.
Тренажер относится к изолирующим упражнениям, а именно, направленным на проработку одной группы мышц.
Этот тренажер является одним из любимых тренажеров для женской половины, потому что позволяет проработать те мышцы ног, которые в других упражнениях или тренажерах не задействуются и почти нет альтернатив.
Для высокой эффективности проработки мышцы требуется специальный тренажер — тренажер сведение и разведение ног с целенаправленной нагрузкой, с возможностью регулировать вес утяжеления.
Удобные и прочные ППУ сиденья обшиты на тканевой основе кожзамом.
Рама окрашена порошковой краской, имеющей значительную устойчивость к повреждениям.
Все крутящиеся и поворотные механизмы снабжены подшипниками для долговечной плавной работы. Вес грузового блока составляет 105 кг, с плитками по 5 кг. Направляющие из нержавеющей стали также играют не маловажную роль в плавности хода груза.
В целом ресурс тренажер изготовлен с запасом и выполняет все заявленные характеристики, а также проработает больше гарантийного срока при минимальном обслуживании. Та же мягкая часть тренажера при аккуратном обращении остается целой даже спустя 5 лет работы интенсивной эксплуатации в спортивных залах.
Характеристики:
Высота — 1650 мм.;
Длина — 1700 мм.;
Ширина — 920 мм.;
Вес пользователя — до 150 кг.;
Вес стека — 105 кг.
Шаг нагрузки — 5 кг.;
Материал мягкой части — вспененный пенополиуретан;
Материал обшивки — износостойкий кожзаменитель;
Толщина металла — 3,5 мм.;
Покрытие металла — порошковая полимерная краска;
Цвет — белый;
Материал направляющих — нержавеющая сталь;
Вес — 200 кг.
Особенности:
— Полимерная покраска.
— Для устойчивости на краях ножек подъемы.
— ППУ спинки анатомической формы.
— Мощная конструкция.
— В узлах тренажера установлены подшипники.
— Полуавтоматические фиксаторы.
— Регулировка упоров для ног.
— Тросик в силиконовой оплетке.
— Тихая работа тренажера.
— Гарантия на металлическую конструкцию 5 лет.
— Гарантия на мягкую часть 2 года.
— Вес пользователя до 150 кг.
— Стек 105 кг.
Быстрая доставка по всей Украине
МЫ СТАРАЕМСЯ ДЛЯ ВАС
Разведение ног в тренажере сидя, наклоны вперед, стоя. Техника выполнения, какие мышцы работают
Содержание
- Правила и особенности
- Зачем нужен
- Противопоказания и возможный вред
- Основной комплекс
- Сидячая техника
- Разведение с наклоном вперед
- Техника выполнения в положении стоя
- Техника в положении лежа
- Домашние упражнения
- Недельный график
- Когда ожидать эффекта
- Тренажер видео
Тренажер, предназначенный для подъема ног в положении сидя, обязательно найдется в любом тренажерном зале. С его помощью можно выполнять упражнения на отведение и приведение бедра, разнообразив тренировку и сделав ее максимально эффективной.
С его помощью можно выполнять упражнения на отведение и приведение бедра, разнообразив тренировку и сделав ее максимально эффективной.
Подъем ног в тренажере сидя, наклоны вперед, стоя помогают проработать боковую поверхность бедра, а в сочетании с другими вариантами тренировок можно быстро сделать бедра более округлыми, выделив линию талии.
Правила и особенности
Подъем ног сидя — это поддерживающее и формирующее упражнение.Во время его выполнения целевыми мышцами считаются приводящая и средняя ягодичные мышцы. А главная польза упражнения в том, что оно позволяет задействовать приводящую мышцу, которая в повседневной жизни пассивна.
То же самое относится и к ягодичной мышце, которая передает всю свою нагрузку на соседние. А благодаря тренировкам с абдуктором ног можно изолировать целевые группы мышц, заставляя их нагружать по максимуму без помощи вспомогательных зон.
Происходит увеличение объема ягодиц и бедер, но это не основная цель данного упражнения — упор делается на укрепление слабых мест, которые невозможно тренировать в повседневной жизни.

Но максимальный эффект можно получить, если сначала использовать прогревающую разминку, ведь с ее помощью можно стимулировать выработку в суставах жидкости, которая действует как суставная смазка и сводит к минимуму вероятность получения повреждений.
При проработке мышц отводящих мышц голени работают в основном основные мышцы: верхняя, средняя и малая ягодичная.
Но, если строго соблюдать все рекомендации, учитывать правила, то дополнительно будут работать и другие мышцы:
- разгибатели позвоночника;
- большой ведущий;
- грушевидный;
- Пресс;
- широкий боковой;
- напрягатель широкой фасции;
- квадрат поясничный.
Подъем ног в тренажере сидя — это упражнение, имеющее свои технические тонкости, если вооружиться ими, то можно сделать любое занятие в зале максимально эффективным и результативным:
- При работе с тренажером должен функционировать только тазобедренный сустав.
- Мощным движением разведите ноги в стороны и медленно сведите их вместе.
- В точке максимального разведения ног следует задержаться на 2-3 секунды, чтобы максимально нагрузить мышцы.
- Ноги необходимо максимально развести в стороны.
- Ладонями нужно крепко держаться за специальные ручки тренажера.
- Поднимите вес на тренажере без фанатизма. Большой вес будет давать сильную нагрузку на все тело и в итоге после доработки всех подходов будет намного сложнее, а это неправильно и результата не принесет.
- Нельзя делать резкие рывки, использовать только целевые мышцы.
- Не нужно доводить ноги до конца, так как в этом случае снимается нагрузка с мышц.Напряжение должно сохраняться на протяжении всей работы с тренажером.
- Обязательно соблюдать технику дыхания: выдох — разведение, вдох — смешение.
- Во время выполнения упражнения тело должно быть неподвижно. Особенно следует следить за спиной, ведь если во время выполнения упражнения спина смещается в сторону, то поясница получит максимальную нагрузку, а в некоторых случаях даже сильную травму.
- Во время выполнения упражнения нужно следить за внешней линией бедра, чтобы оно плотно касалось тренажера.В противном случае вся нагрузка пойдет на квадрицепсы.
- Для максимальной нагрузки на ягодичные мышцы носки лучше развернуть наружу.


Если учесть все тонкости вышеописанного упражнения, то можно получить массу преимуществ:
- возможность прорабатывать отдельные группы мышц по максимуму;
- держать в тонусе мышцы бедра снаружи;
- формируют правильно отводящие группы мышц;
- усиливают кровообращение в органах малого таза;
- укрепить ягодичные мышцы;
- минимальная нагрузка ложится на спину;
- техника исполнения под силу даже неопытным новичкам.
Зачем нужен
Подъем ног в тренажере сидя в первую очередь рекомендуется тем, кто только собирается начать заниматься спортом и восстановить утраченные формы. Новички не всегда могут с первого раза освоить тяжелый базовый комплекс, дающий сильнейший анаболический отклик.
Также это упражнение идеально подходит для девушек, многие считают его чисто женским, которые уже смогли с помощью фитнеса сделать свою фигуру практически идеальной, но все же легкая шлифовка ей все же требуется.Часто заметно, что ягодичная мышца немного ослаблена и не имеет объема, поэтому ее необходимо «надуть».
Противопоказания и возможный вред
Разгибание ног сидя в тренажере нельзя использовать во время тренировки в 2 случаях:
- при болях в спине;
- при травме спины в поясничном отделе;
- после травмы бедра.
Главный комплекс
Разведение ног в положении сидя выполняется на специальном тренажере, на котором перед началом тренировки обязательно нужно установить вес.Для мужчин оптимальный вес колеблется в пределах 20-25 кг, а для женщин – 10-20 кг. Подобрать оптимальный вес для каждого человека в отдельности не составит труда.
Установите минимальный показатель, выполните упражнение 10-15 раз, если сможете выполнить его полностью, то вес правильный, если же чувствуется жжение в мышцах нижних конечностей, то вес превышен. Когда вес правильный, вы можете начать выполнять упражнения, и есть много вариантов.
Когда вес правильный, вы можете начать выполнять упражнения, и есть много вариантов.
Техника сидя
Как уже было сказано, изначально устанавливается оптимальный для каждого человека вес.
Тренировка ног в тренажере в положении сидяИ далее точно по такой методике:
- необходимо сесть в тренажер, плотно прижать таз и позвоночник к перекладине;
- ножки удобно размещаются на специальной подставке;
- прижать наружную часть бедра к специальным упорам, предусмотренным в тренажере;
- обхватить руками подлокотники тренажера, мышцы живота должны быть напряжены, только так можно зафиксировать позвоночник в правильном положении;
- выпустив воздух из легких, разведите ноги в стороны и делать это нужно в быстром темпе, но без резких движений, не следует расставлять ноги слишком широко, суставы должны работать максимально, но ягодицы должны чувствовать напряжение Хорошо;
- на вдохе в медленном темпе свести бедра вместе, но так, чтобы они не соприкасались, в отводящих мышцах должно сохраняться напряжение, полностью опускать блочные плиты следует только в конце всех повторений;
- выполнить упражнение столько раз, чтобы в ягодицах ощущалось легкое жжение.
Разведение с наклоном вперед
Этот вариант базового упражнения сидя помогает перенести нагрузку с бедер на ягодицы и помогает изолировать ягодичные мышцы.
Это работает так:
- не забывайте про вес, который нужно установить на тренажере;
- если тренажер универсальный и предназначен не только для разведения, но и для сведения ног, то под упорами есть специальный механизм, с помощью которого можно переключать механизм, задавая положение для разведения;
- сядьте на сиденье тренажера;
- положить ноги на специальную поставку;
- сомкнуть руки «в замок» и вытянуться вперед, немного прогнуть спину в пояснице и наклониться вперед – это положение позволяет перенести нагрузку на ягодицы;
- выдох – ноги в стороны, на вдохе вернуться в исходное положение;
- нельзя допускать полного расслабления ног во время выполнения упражнения, лучше снова поставить бедра;
- не раскачивать корпус;
- это упражнение дополнительно нагружает мышцы спины, поэтому их не стоит сильно перегружать.

Техника выполнения в положении стоя
Упражнение на разгибание ног стоя можно выполнять в специальном тренажере, но не всегда его можно найти в спортзале, т.к. основное его отличие от сидячего варианта — отсутствие скамьи и наличие передних ручек для фиксации тело.
Поэтому упражнение можно делать на тренажере, оборудованном скамьей, а можно так:
- установите нужный вес, как было рекомендовано ранее, при выполнении других упражнений;
- положить ноги на специальную подставку;
- наклонить корпус вперед, держась за конструкцию тренажера;
- поднять таз и удерживать его с навесом при выполнении всего комплекса;
- не надо сильно двигать ногами, амплитуда та же.
Этот вариант способствует максимальной нагрузке на ягодицы, а в статическом положении идет дополнительная нагрузка на сгибатели и разгибатели нижних конечностей.
Техника в положении лежа
Трудно найти специальный тренажер для выполнения упражнений в положении лежа, но в некоторых конструкциях спину можно опустить максимально, чтобы у спортсмена была возможность принять положение лежа. Эта методика помогает минимизировать нагрузку на позвоночник и мышцы поясничного отдела.
Эта методика помогает минимизировать нагрузку на позвоночник и мышцы поясничного отдела.
Именно благодаря этой методике упражнение можно использовать даже в период восстановления после травм и при проблемах с позвоночником. Этот вариант помогает лучше проработать нижнюю часть большой ягодичной мышцы.
Домашние упражнения
Если вдруг по каким-то причинам не получилось посетить спортзал, а пропускать тренировку нежелательно, то есть специальные упражнения, которые помогут проработать те же мышцы, что и на тренажере.Для этого следует приобрести резинку или мини-резинку.
Домашние упражнения могут включать следующие упражнения:
| Разведение ног с резинкой сидя на стуле | Сядьте удобно на стул, при этом спина должна быть идеально ровной. Натяните резинку на бедра, поставьте ноги на ширине плеч. Разведите ноги в разные стороны, максимально натянув резинку, а затем верните их в исходное положение, но не расслабляйте, мышцы должны быть постоянно нагружены. |
| Ягодичный мостик | Примите положение лежа на спине с резинкой на уровне бедер. Руки лежат вдоль туловища, а ноги согнуты в коленях, ступни твердо стоят на полу. Ягодицы и живот должны быть максимально напряжены, бедра слегка отрываться от пола. Стоя в мосту, выпрямить одну ногу и вернуть ее назад, опустить бедра. Повторить двумя ногами 10-12 раз. |
| Махи в сторону с приседанием | Резинка должна быть поднята немного выше уровня колена.Расставьте ноги как можно шире. Присаживайтесь, но не сильно, а при вставании нужно махнуть ногой в сторону. Выполнив очередной присед, поменяйте ногу на другую. |
| Щипцы | Необходимо принять положение лежа, выполнить полумост. Расположите резинку чуть выше колен. Во время упражнения ягодицы не должны касаться пола. Колени нужно развести в стороны, а затем свести вместе, но стараться не касаться друг друга. Нужно работать ногами, как щипцами, которые пытаются что-то захватить. |
| Фонтан | Переместите резинку на середину стоп, упритесь в пол коленями и ладонями рук, приняв положение стоя на четвереньках. По очереди поднимайте вверх согнутую в колене ногу, голень при этом должна занимать положение перпендикулярно бедру. Нога должна быть струей фонтана, бьющего из-под земли. Работайте с одной ногой, а затем со второй. |
| Подъемы ног лежа на боку | Наденьте эластичную ленту на ноги и разместите ее прямо над ступнями.Примите лежачее положение на боку, при этом подложив руку под туловище так, чтобы положение было как бы полулежа. Поднимите одну ногу вверх, пока не почувствуете жжение в ягодичной мышце. Пробегите 10-12 раз, а затем перевернитесь и повторите столько же раз на вторую ногу. |
| Отведение ноги к колену | Закрепите резинку на уровне колена. Примите положение стоя на четвереньках. Выполнить мах ногой вверх, при этом нога должна оставаться согнутой в колене.Повторить 10 раз и не менее 3 подходов. |
| Боковые ступеньки с резинкой | Встаньте на пол, наденьте резинку на ноги и расположите ее чуть выше уровня стопы. Боковые шаги выполнять до 10-15 раз, подходов должно быть не менее 3-4. |
| Махи назад с резинкой в положении стоя | Встать, корпус слегка наклонить вперед, ногу отвести назад и чуть вверх. Чем выше поднимается нога, тем больше нагрузка на мышцы бедра.Сначала работайте с одной ногой, а затем повторите то же самое со второй. |
Недельный график
Подъем ног в тренажере сидя будет полезен, если правильно составить программу тренировок:
- должно включать не менее 6 упражнений;
- каждая тренировка должна быть направлена на проработку 1 или 2 группы мышц, так, например, в 1-й день прорабатываются грудные мышцы, во 2-й день прокачивается спина и бицепс, а в 3-й день — ноги;
- количество повторений и подходов должно быть традиционным: 8-12 и 3-4, можно и увеличить.

Итак, тренировка на проработку мышц бедра и ягодиц должна включать:
- разминка — 5-10 минут;
- разведение ног сидя – 10-12 раз по 3 подхода;
- разведение в наклоне туловища вперед — 10-12 раз до 3-х подходов;
- разведение в положении стоя — 10-12 раз до 3-х подходов;
- разведение лежа на скамье — 10-12 раз по 3 подхода;
- растяжка мышц — 5-10 мин.
Если не было возможности пойти в спортзал, то тренировку проводят дома, не забывая о разминке и растяжке в конце всех упражнений. Выполняйте каждое упражнение не менее 10 раз и не менее 3 подходов.
Когда ожидать эффекта
Для того, чтобы результаты были быстрыми, их можно будет заметить через 1-2 месяца регулярных тренировок — не менее 3 раз в неделю, есть несколько советов:
- угол сгибания ног не менее 90 градусов и должен быть таким постоянно;
- все движения плавные;
- отдыхать по 2 минуты между подходами, но не сидеть, а растягивать мышцы ног, не давая им остыть и быть готовыми к следующему подходу;
- последний подход лучше выполнять с небольшим снижением веса и делать это нужно быстро, не давая мышцам остыть.

Разведение ног в тренажере в любом из положений сидя, стоя, лежа, это отличная комплексная проработка мышц бедра и ягодиц, которые остаются в повседневных и других упражнениях задействованными.
Стоит помнить, что это упражнение считается изолированным и выполняется после базовых упражнений. Именно база поможет сделать форму ног более красивой, а мышцы более упругими. Только в сочетании с базой можно значительно ускорить обмен веществ, помочь сжечь лишний жир.
Видеотренажер
Техника и нюансы разведения ног на тренажере:
Влияние конструкции и механики тренажера тазобедренного сустава на износ и ползучесть подшипников металл-полиэтилен
Proc Inst Mech Eng H. 2016 May; 230(5): 389–397.
Murat Ali
1 Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс, Великобритания
Mazen Al-Hajjar
1 Институт медицинской и биологической инженерии, Школа машиностроения , Университет Лидса, Лидс, Великобритания
Сьюзен Партридж
1 Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс, Великобритания
Софи Уильямс
1 Институт медико-биологической медицины Машиностроение, Школа машиностроения, Университет Лидса, Лидс, Великобритания
Джон Фишер
1 Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс, Великобритания
2 Лидс Опорно-двигательный биомедицинский Исследовательский отдел, Учебная больница Лидса NHS Trust, Университет Лидса, Лидс, Великобритания
90 144 Louise M Jennings1 Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс, Великобритания
1 Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс , Великобритания
2 Отдел биомедицинских исследований опорно-двигательного аппарата Лидса, Учебная больница Лидса NHS Trust, Университет Лидса, Лидс, Великобритания
Луиза М. Дженнингс, Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс LS2 9JT, Великобритания.Электронная почта: ku.ca.sdeel@sgninnej.ml
Дженнингс, Институт медицинской и биологической инженерии, Школа машиностроения, Университет Лидса, Лидс LS2 9JT, Великобритания.Электронная почта: ku.ca.sdeel@sgninnej.mlПоступила в редакцию 13 июня 2015 г.; Принято 11 ноября 2015 г.
Abstract
Симуляторы тазобедренного сустава широко используются для доклинических испытаний эндопротезов тазобедренного сустава. Различия в конструкциях тренажеров и условиях испытаний, используемых во всем мире, могут повлиять на трибологические характеристики полиэтилена. Целью данного исследования было оценить влияние механики и конструкции тренажера на износ и ползучесть полиэтилена сверхвысокой молекулярной массы. В первой части этого исследования электромеханический и пневматический симуляторы использовались для сравнения износа и ползучести компонентов металл-полиэтилен при одинаковых стандартных условиях ходьбы.Во второй части исследования тот же электромеханический тренажер тазобедренного сустава использовался для изучения влияния кинематики на износ. При использовании электромеханического симулятора наблюдались более высокие скорости износа и глубина проникновения по сравнению с пневматическим симулятором. Когда приведение/отведение было введено в цикл ходьбы, не было существенной разницы в износе с износом, полученным в условиях цикла ходьбы без приведения/отведения. Это исследование подтвердило влияние конструкции тренажера тазобедренного сустава и условий нагрузки на износ полиэтилена, поэтому следует избегать прямых сравнений абсолютных скоростей износа между различными тренажерами тазобедренного сустава.Это исследование также подтвердило, что результирующая траектория износа является определяющим фактором для получения клинически значимой скорости износа, и это может быть достигнуто как с двумя осями, так и с тремя осями вращения. Тем не менее, три оси вращения (с включением приведения/отведения) более точно воспроизводят клинические условия и поэтому должны быть подходом к проектированию недавно разработанных симуляторов тазобедренного сустава, используемых для доклинических испытаний.
При использовании электромеханического симулятора наблюдались более высокие скорости износа и глубина проникновения по сравнению с пневматическим симулятором. Когда приведение/отведение было введено в цикл ходьбы, не было существенной разницы в износе с износом, полученным в условиях цикла ходьбы без приведения/отведения. Это исследование подтвердило влияние конструкции тренажера тазобедренного сустава и условий нагрузки на износ полиэтилена, поэтому следует избегать прямых сравнений абсолютных скоростей износа между различными тренажерами тазобедренного сустава.Это исследование также подтвердило, что результирующая траектория износа является определяющим фактором для получения клинически значимой скорости износа, и это может быть достигнуто как с двумя осями, так и с тремя осями вращения. Тем не менее, три оси вращения (с включением приведения/отведения) более точно воспроизводят клинические условия и поэтому должны быть подходом к проектированию недавно разработанных симуляторов тазобедренного сустава, используемых для доклинических испытаний.
Ключевые слова: Замена тазобедренного сустава, симулятор тазобедренного сустава, полиэтилен, износ
Введение
Доклинические испытания эндопротезов тазобедренного сустава необходимы для определения их безопасности и эффективности перед имплантацией пациентам.Трибологические характеристики протезов тазобедренного сустава можно определить при различных физиологических кинетических и кинематических условиях с помощью тренажеров тазобедренного сустава. 1,2 Разработка трибологического моделирования была основана на среднем пациенте, выполняющем ходьбу, 3–5 первоначально предпринятой для изучения клинического разрушения подшипников металл-полиэтилен 6,7 где полиэтилен ( Сообщалось о ПЭ) износе и остеолизе, приводящем к асептическому расшатыванию и отказу. 8 Это легло в основу действующего международного стандарта для доклинического моделирования износа тазобедренного сустава, ISO 14242-1:2014. 9 За прошедшие годы методы доклинических испытаний получили дальнейшее развитие, чтобы включить более широкий спектр физиологических состояний в попытке понять причины увеличения частоты клинических неудач и создать имплантаты с более длительным сроком службы, отвечающие требованиям активных пациентов. Эти расширенные методы доклинических испытаний включают неблагоприятные условия, при которых учитываются варианты позиционирования хирургических имплантатов по 6 степеням свободы, а также изменения в имплантатах, такие как повреждение металлических головок бедренных костей и окислительная деградация полиэтиленовых чашек, а также вариации и действия пациентов. были рассмотрены. 10–13 Для оценки эффективности эндопротезирования тазобедренного сустава в неблагоприятных условиях требуются тренажеры тазобедренного сустава, способные применять необходимую физиологическую кинетику и кинематику и соответствующие последним международным стандартам.
Эти расширенные методы доклинических испытаний включают неблагоприятные условия, при которых учитываются варианты позиционирования хирургических имплантатов по 6 степеням свободы, а также изменения в имплантатах, такие как повреждение металлических головок бедренных костей и окислительная деградация полиэтиленовых чашек, а также вариации и действия пациентов. были рассмотрены. 10–13 Для оценки эффективности эндопротезирования тазобедренного сустава в неблагоприятных условиях требуются тренажеры тазобедренного сустава, способные применять необходимую физиологическую кинетику и кинематику и соответствующие последним международным стандартам.
Конструкция и сложность симуляторов тазобедренного сустава, а также условия испытаний сильно различались, 14–38 означает, что сравнение результатов между разными симуляторами было сложной задачей. 1,2 Симуляторы тазобедренного сустава должны быть способны генерировать физиологические траектории износа и условия испытаний для соответствующей доклинической оценки. 28,29 Пневматические, гидравлические и электромеханические методы использовались для приложения механических нагрузок и движений к тазобедренному суставу. Симуляторам тазобедренного сустава требуется несколько станций для проведения значимых статистических сравнений.
28,29 Пневматические, гидравлические и электромеханические методы использовались для приложения механических нагрузок и движений к тазобедренному суставу. Симуляторам тазобедренного сустава требуется несколько станций для проведения значимых статистических сравнений.
Полиэтилен сверхвысокой молекулярной массы (СВМПЭ) используется в большинстве протезов тазобедренного сустава уже более 30 лет с клиническим успехом в краткосрочной и среднесрочной перспективе. 39–42 Износ полиэтилена был одним из основных факторов, ограничивающих успешную долгосрочную работу заменителей суставов металл на СВМПЭ. 7 Ingham и Fisher 7 смогли объяснить результирующую неблагоприятную биологическую реакцию на остатки износа полиэтилена, которая привела к асептическому расшатыванию, вызванному остеолизом. Чтобы улучшить показатели клинического успеха СВМПЭ, постоянно предпринимались усилия по повышению износостойкости. Симуляторы тазобедренного сустава, использующие стандартные условия, успешно предсказывали улучшение износостойкости сшитого ПЭ по сравнению с обычным ПЭ, что нашло отражение в клинических исследованиях. 43–45 Большой разброс в износе металла на СВМПЭ, о котором сообщалось клинически 43,46,47 , не был воспроизведен in vitro в исследованиях, в которых применялся стандартный цикл ходьбы, предполагая, что средний пациент с хорошо установленный имплантат.
43–45 Большой разброс в износе металла на СВМПЭ, о котором сообщалось клинически 43,46,47 , не был воспроизведен in vitro в исследованиях, в которых применялся стандартный цикл ходьбы, предполагая, что средний пациент с хорошо установленный имплантат.
Влияние поперечного сдвига на износ ПЭ хорошо изучено и было продемонстрировано экспериментально и расчетно. 48–50 Поэтому необходимо моделировать разнонаправленные эллиптические скользящие контактные пути во время цикла ходьбы. 25 В литературе сообщается, что скорость износа обычного полиэтилена от симуляторов бедра составляет 35–50 мм 3 /миллион циклов. 39,51 Улучшенная износостойкость и снижение эффектов поперечного сдвига были обнаружены при введении сшитого ПЭ.Скорость износа ниже 20 мм 3 /млн циклов была зарегистрирована для умеренно сшитого полиэтилена и еще меньше для высокосшитого полиэтилена. 51,52 Сшитый ПЭ в настоящее время продемонстрировал более чем 10-летний клинический успех при снижении скорости клинического износа. 53,54
53,54
Износ ПЭ происходит в результате преимущественно скользящего контакта с контртелом при артикуляционных движениях тазобедренного сустава. Ползучесть – это постоянная деформация ПЭ из-за условий нагрузки. Как износ, так и ползучесть полиэтилена измерялись с помощью симуляторов тазобедренного сустава, 20,51,52,55 , где наблюдалась более высокая глубина проникновения до достижения стационарной скорости износа.Это объясняет более высокую кратковременную линейную глубину проникновения, измеренную in vivo после имплантации. 43 Клинически наблюдаются как износ, так и ползучесть; поэтому одновременная оценка обоих параметров в лаборатории стала неотъемлемой частью доклинического моделирования тазобедренного сустава.
Пневматический симулятор тазобедренного сустава ProSim первого поколения широко использовался в течение последних 15 лет для определения износа протезов тазобедренного сустава в стандартных условиях ходьбы. Этот тренажер применяет одну ось загрузки пневматически и имеет две независимо управляемые оси движения, сгибание/разгибание (F/E) и внутреннее/внешнее (I/E) вращение, которые применяются электромеханически. Стандартный цикл походки выполняется с фазовым углом вращения I/E на 90°, не совпадающим по фазе с движением F/E. Было показано, что эта конфигурация дает физиологически значимый биаксиальный путь износа между сочленяющимися поверхностями, что дает результаты износа, аналогичные наблюдаемым в естественных условиях. 10
Стандартный цикл походки выполняется с фазовым углом вращения I/E на 90°, не совпадающим по фазе с движением F/E. Было показано, что эта конфигурация дает физиологически значимый биаксиальный путь износа между сочленяющимися поверхностями, что дает результаты износа, аналогичные наблюдаемым в естественных условиях. 10
Для разработки усовершенствованных методов доклинического моделирования износа, исследующих более широкий спектр клинических состояний и состояний пациента, будь то хирургическое позиционирование или более высокие уровни активности пациента, а также отвечающих требованиям международных стандартов, необходимо разработать и разработать тренажеры для бедер, отвечающие этим требованиям.В данном исследовании представлен новый электромеханический тренажер бедра, способный соответствовать требованиям международного стандарта и проводить испытания в неблагоприятных условиях. В первой части этого исследования скорость износа подшипников из СВМПЭ, соединенных металлом и умеренно сшитым материалом, была протестирована с использованием недавно разработанного электромеханического симулятора тазобедренного сустава ProSim EM13 («EM» означает «электромеханический», а «13» означает год выпуска). ввод в эксплуатацию) сравнивались с данными, полученными на ранее существовавшем пневматическом симуляторе тазобедренного сустава ProSim.Во-вторых, влияние кинематики на износ умеренно сшитого СВМПЭ было исследовано путем сравнения условий вращения по двум и трем осям с различной фазировкой с использованием одного и того же электромеханического тренажера бедра.
ввод в эксплуатацию) сравнивались с данными, полученными на ранее существовавшем пневматическом симуляторе тазобедренного сустава ProSim.Во-вторых, влияние кинематики на износ умеренно сшитого СВМПЭ было исследовано путем сравнения условий вращения по двум и трем осям с различной фазировкой с использованием одного и того же электромеханического тренажера бедра.
Материалы и методы
Износ десяти протезов тазобедренного сустава диаметром 36 мм из металла и полиэтилена (Marathon™; DePuy Synthes Joint Reconstruction, Лидс, Великобритания) определяли с использованием ProSim EM13 (n = 6) и ProSim пневматического ( n = 4) тренажеры для тазобедренного сустава (Simulation Solutions, Стокпорт, Великобритания).В обоих тренажерах чашка вертлужной впадины (вкладыш) располагалась в анатомическом положении, и, чтобы избежать сложностей, связанных с наклонными ножками, компоненты головки бедренной кости закреплялись на конических вертикальных втулках, закрепленных на держателе. На электромеханическом симуляторе угол наклона чашки был установлен на 30° к горизонтальной плоскости, что соответствует последнему международному стандарту и эквивалентно 40° in vivo.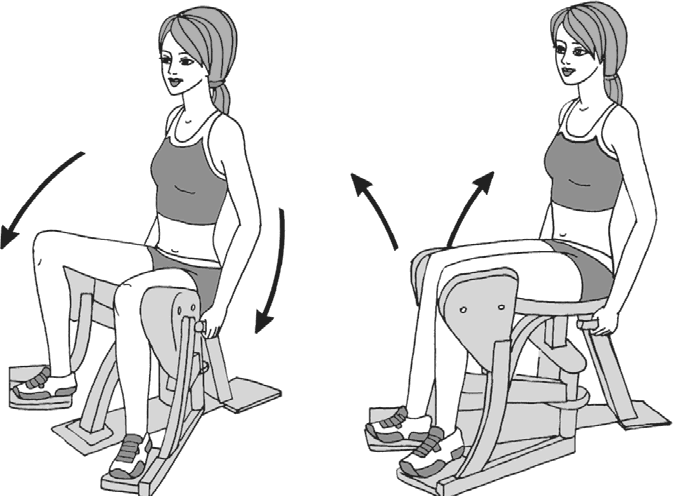 Чтобы соответствовать предыдущим испытаниям, проведенным на пневматическом симуляторе, угол наклона чашки был установлен на 35° к горизонтальной плоскости, что эквивалентно 45° in vivo. 56,57 Разница в 5° угла наклона чаши между двумя тренажерами будет способствовать разному расположению зоны износа; однако никакого влияния на скорость износа или глубину проникновения не ожидалось. Эти углы наклона чашки были на уровне или ниже 45°, при этом скорость износа полиэтилена, как ожидается, будет одинаковой, 58 , поскольку зона износа находилась в пределах поверхности подшипника, а разница между двумя группами составляла всего 5°. Ацетабулярные чашки были установлены в соответствующие металлические оболочки, зацементированные внутри держателя чашки, что позволяло снимать их для гравиметрических измерений.
Чтобы соответствовать предыдущим испытаниям, проведенным на пневматическом симуляторе, угол наклона чашки был установлен на 35° к горизонтальной плоскости, что эквивалентно 45° in vivo. 56,57 Разница в 5° угла наклона чаши между двумя тренажерами будет способствовать разному расположению зоны износа; однако никакого влияния на скорость износа или глубину проникновения не ожидалось. Эти углы наклона чашки были на уровне или ниже 45°, при этом скорость износа полиэтилена, как ожидается, будет одинаковой, 58 , поскольку зона износа находилась в пределах поверхности подшипника, а разница между двумя группами составляла всего 5°. Ацетабулярные чашки были установлены в соответствующие металлические оболочки, зацементированные внутри держателя чашки, что позволяло снимать их для гравиметрических измерений.
На электромеханическом тренажере () нагрузка прикладывалась в вертикальном направлении (вдоль верхней/нижней оси) через центр вертлужной впадины через пружину распределительным валом во время цикла ходьбы. Подстаканник был прикреплен к узлу с двумя наборами линейных направляющих, чтобы обеспечить пассивное медиально-латеральное и передне-заднее смещение; поэтому любое смещение было исправлено путем самоцентрирования чашки. Все угловые смещения применялись к головке бедренной кости относительно ее центра вращения.
Подстаканник был прикреплен к узлу с двумя наборами линейных направляющих, чтобы обеспечить пассивное медиально-латеральное и передне-заднее смещение; поэтому любое смещение было исправлено путем самоцентрирования чашки. Все угловые смещения применялись к головке бедренной кости относительно ее центра вращения.
Схема испытательной камеры (а) электромеханического симулятора тазобедренного сустава и (б) пневматического симулятора тазобедренного сустава.
На пневматическом симуляторе () нагрузка прикладывалась пневматически через центр головки бедренной кости в направлении, перпендикулярном вращению F/E. Угловые перемещения на пневматическом тренажере применялись с помощью двигателей. Вращательное вращение в/в применялось к вертлужной чашке, а вращение в/в – к головке бедренной кости. Каждая станция пневматического симулятора ProSim имела шарнир под держателем головки бедренной кости, что позволяло центрировать головку бедренной кости.
Во всех испытаниях применялся двухпиковый профиль входной нагрузки для получения пиковой выходной нагрузки 3 кН и нагрузки фазы качания 0,3 кН (). Для условий вращения по двум осям применяли вращение F/E (+30°/-15°) и I/E вращение (±10°). Фазовый угол вращения I/E был на 90° не в фазе с движением F/E, что согласуется с предыдущими исследованиями, 10,29 , чтобы создать двухосную траекторию износа. Тест длился в общей сложности 5 миллионов циклов для каждого симулятора с интервалами измерения в 1, 2, 3 и 5 миллионов циклов.
Для условий вращения по двум осям применяли вращение F/E (+30°/-15°) и I/E вращение (±10°). Фазовый угол вращения I/E был на 90° не в фазе с движением F/E, что согласуется с предыдущими исследованиями, 10,29 , чтобы создать двухосную траекторию износа. Тест длился в общей сложности 5 миллионов циклов для каждого симулятора с интервалами измерения в 1, 2, 3 и 5 миллионов циклов.
Входные профили симулятора: (a) нагрузки и угловые смещения для условий вращения по двум осям и (b) нагрузки и угловые смещения для условий вращения по трем осям.
Во второй части исследования применялись три оси вращения в соответствии с международным стандартом ISO 14242-1:2014 (), 9 , таким образом, включая приведение/отведение +7°/-4° в рамках стандартного цикла ходьбы . Моделирование вращения по трем осям было завершено на электромеханическом симуляторе и выполнено в течение 3 миллионов циклов с точками измерения на 1, 2 и 3 миллионах циклов.
Контрольные образцы насыщения под нагрузкой (n = 2 для ProSim EM13, n = 1 для ProSim пневматического) использовались для измерения деформации ползучести полиэтиленовых вкладышей и ненагруженных контрольных образцов погружения (n = 3 для ProSim EM13, n = 1 для ProSim пневматические) использовались для измерения изменения веса из-за поглощения жидкости. Смазка представляла собой 25% сыворотку новорожденных телят, разбавленную деионизированной водой (об./об.) с добавлением 0,03% азида натрия (об./об.) для замедления роста бактерий. Сыворотку заменяли примерно каждые 330 000 циклов.
Смазка представляла собой 25% сыворотку новорожденных телят, разбавленную деионизированной водой (об./об.) с добавлением 0,03% азида натрия (об./об.) для замедления роста бактерий. Сыворотку заменяли примерно каждые 330 000 циклов.
В каждом интервале измерения чашки удаляли из держателей компонентов симулятора, очищали и оставляли для стабилизации в среде с регулируемой влажностью и температурой в течение не менее 48 часов перед измерением. Изменение массы определяли с помощью микровесов (аналитические весы Mettler Toledo XP205, Грайфензее, Швейцария) и впоследствии преобразовывали в объемный износ с использованием плотности 0,934 × 10 −3 г/мм 3 для СВМПЭ. Координатно-измерительная машина (CMM; Legex 322, Mitutoyo, Япония) использовалась для измерения пенетрации из-за износа и ползучести посредством построения трехмерной карты поверхностей вкладыша вертлужной впадины и анализа с использованием программного обеспечения Redlux (Саутгемптон, Великобритания). Изношенные компоненты сравнивали с измерениями перед испытанием, чтобы определить расположение зоны износа и максимальную глубину проникновения испытуемых образцов и нагруженных контрольных образцов. Средние скорости износа были рассчитаны с доверительным интервалом 95%. Однофакторный дисперсионный анализ (ANOVA) и t-критерий парной выборки были проведены для статистического анализа по мере необходимости. Уровни значимости были взяты при p < 0,05, что указывает на статистическую разницу между группами.
Изношенные компоненты сравнивали с измерениями перед испытанием, чтобы определить расположение зоны износа и максимальную глубину проникновения испытуемых образцов и нагруженных контрольных образцов. Средние скорости износа были рассчитаны с доверительным интервалом 95%. Однофакторный дисперсионный анализ (ANOVA) и t-критерий парной выборки были проведены для статистического анализа по мере необходимости. Уровни значимости были взяты при p < 0,05, что указывает на статистическую разницу между группами.
Результаты
Общая (0–5 миллионов циклов) средняя скорость износа (доверительный интервал ±95%) подшипников из сплава металл-на-СВМПЭ, испытанных на электромеханических и пневматических симуляторах, составила 14.6 ± 1,0 и 8,9 ± 2,7 мм 3 /млн циклов соответственно (). В диапазоне от 0 до 5 миллионов циклов средняя скорость износа у EM13 была значительно выше (p < 0,01) по сравнению с пневматическим симулятором. Суммарная глубина проникновения износа и ползучести увеличивалась в каждой точке измерения как для электромеханических, так и для пневматических имитаторов (). Глубина проникновения из-за ползучести определялась по нагруженным компонентам управления пропитыванием, где при использовании обоих симуляторов наблюдалась одинаковая ползучесть (). Было измерено максимальное среднее значение глубины проникновения износа и ползучести от 0 до 5 миллионов циклов для каждого тестового образца и нагруженного контрольного образца ().Глубина проникновения увеличивалась с каждым интервалом измерения, и при 5 миллионах циклов средние максимальные глубины проникновения (доверительные интервалы ±95%), измеренные для электромеханического и пневматического симуляторов, значительно различались на 0,24 ± 0,01 и 0,12 ± 0,01 мм соответственно (p < 0,01). Нагруженные контрольные образцы выдержки без сочленения показали, что большая часть ползучести полиэтилена произошла в течение первого миллиона циклов испытаний.
Глубина проникновения из-за ползучести определялась по нагруженным компонентам управления пропитыванием, где при использовании обоих симуляторов наблюдалась одинаковая ползучесть (). Было измерено максимальное среднее значение глубины проникновения износа и ползучести от 0 до 5 миллионов циклов для каждого тестового образца и нагруженного контрольного образца ().Глубина проникновения увеличивалась с каждым интервалом измерения, и при 5 миллионах циклов средние максимальные глубины проникновения (доверительные интервалы ±95%), измеренные для электромеханического и пневматического симуляторов, значительно различались на 0,24 ± 0,01 и 0,12 ± 0,01 мм соответственно (p < 0,01). Нагруженные контрольные образцы выдержки без сочленения показали, что большая часть ползучести полиэтилена произошла в течение первого миллиона циклов испытаний.
Средние скорости изнашивания СВМПЭ от 0 до 5 млн циклов с использованием электромеханических и пневматических тренажеров.Столбики погрешностей представляют доверительные интервалы ±95%.
Трехмерное представление износа и ползучести полиэтиленовых футеровок от 1 до 5 млн циклов, полученное с помощью КИМ и программного обеспечения Redlux, после испытаний на (а) электромеханическом симуляторе и (б) пневматическом симуляторе. Положительные значения указывают на проникновение в гильзы.
Трехмерное представление ползучести нагруженных полиэтиленовых вкладышей для контроля намокания от 1 до 5 миллионов циклов, полученное с помощью КИМ и программного обеспечения Redlux, после испытаний на (а) электромеханическом симуляторе и (б) пневматическом симуляторе.Положительные значения указывают на проникновение в гильзы.
Максимальная глубина проникновения полиэтиленовых вкладышей от 0 до 5 миллионов циклов (средний доверительный интервал ±95%).
Наблюдались различия в типичных профилях выходной нагрузки электромеханических и пневматических тренажеров в зависимости от цикла ходьбы. Основными отличиями электромеханического и пневматического тренажеров были фазировка и величина пиковых нагрузок во время циклов ходьбы и скорость перехода от второй пиковой нагрузки к нагрузке фазы маха (). Аналогичный профиль выходной пневматической нагрузки был описан в предыдущем исследовании Liu et al. 59 Электромеханический симулятор смог более точно соответствовать предписанной входной нагрузке, потому что двигатель мог быстро реагировать на изменение нагрузки по сравнению с пневматической системой. Выходные профили углового смещения обоих симуляторов близко соответствовали входным профилям (, ). Аналогичные выходные вращательные движения F/E и I/E наблюдались на обоих симуляторах ().
Аналогичный профиль выходной пневматической нагрузки был описан в предыдущем исследовании Liu et al. 59 Электромеханический симулятор смог более точно соответствовать предписанной входной нагрузке, потому что двигатель мог быстро реагировать на изменение нагрузки по сравнению с пневматической системой. Выходные профили углового смещения обоих симуляторов близко соответствовали входным профилям (, ). Аналогичные выходные вращательные движения F/E и I/E наблюдались на обоих симуляторах ().
Типовые выходные нагрузки и движения электромеханических и пневматических тренажеров.
Средняя скорость износа за 3 млн циклов испытаний в условиях двухосного и трехосного вращения в электромеханическом симуляторе составила 13,1 ± 1,4 и 12,2 ± 1,4 мм 3 /млн циклов соответственно (). Существенной разницы (p = 0,32) между средними скоростями износа подшипников из СВМПЭ с использованием двух осей и трех осей не наблюдалось.
Скорость износа металла 36 мм на СВМПЭ после 3 миллионов циклов испытаний с использованием электромеханического симулятора в условиях двухосного и трехосного вращения (средний доверительный интервал ±95%).
Обсуждение
В этом исследовании использовались два различных дизайна тренажера для изучения влияния механики и кинематики тренажера на износ и ползучесть сшитого полиэтилена. Различная скорость износа, геометрический износ и глубина проникновения прокладок из умеренно сшитого полиэтилена наблюдались с использованием различных симуляторов тазобедренного сустава при применении одних и тех же кинематических входных профилей. Применение вращения I/E к вертлужной чашке и F/E к головке бедренной кости на пневматическом симуляторе по сравнению с обоими движениями, примененными к головке бедренной кости на электромеханическом симуляторе, могло способствовать разнице в степени износа по сравнению с симуляторами. 60 Беспрепятственное пассивное медиальное/латеральное и переднее/заднее смещение вертлужной впадины на электромеханическом симуляторе считается еще одним способствующим фактором. На пневматическом симуляторе любое смещение центров подшипников головки и чашки было исправлено с помощью шарнирного устройства, позволяющего вращать головку по двум осям, а не линейно перемещать чашку. Механика вектора подвижной нагрузки, приложенной к головке бедренной кости на пневматическом симуляторе, отличается от вектора фиксированной нагрузки, приложенной через вертлужную чашечку на электромеханическом симуляторе.Различия в профилях нагрузки также могли способствовать разнице в скорости износа тренажеров.
Механика вектора подвижной нагрузки, приложенной к головке бедренной кости на пневматическом симуляторе, отличается от вектора фиксированной нагрузки, приложенной через вертлужную чашечку на электромеханическом симуляторе.Различия в профилях нагрузки также могли способствовать разнице в скорости износа тренажеров.
Аналогичная деформация ползучести и проникновение ползучести наблюдались между образцами только под нагрузкой из обоих симуляторов. Эти контрольные образцы с нагрузкой на пропитку подтвердили, что в условиях циклической нагрузки полиэтиленовые вкладыши достигают максимальной деформации ползучести между 1 и 2 миллионами циклов, как это наблюдалось в предыдущих экспериментальных, расчетных и клинических исследованиях. 43,52,59 Было обнаружено, что величина проникновения из-за ползучести аналогична оценке, полученной клинически. 61
Разработка симулятора тазобедренного сустава с тремя осями вращения может воспроизвести клиническое движение тазобедренного сустава и обеспечить соответствие последним стандартам ISO. Тем не менее, простота симулятора с двумя осями вращения по-прежнему позволяет применять клинически значимые траектории износа с правильной фазой и величиной каждой оси вращения, как обсуждалось Barbour et al. 29 В этом исследовании были получены сходные скорости износа полиэтилена в условиях двух осей вращения по сравнению с полными тремя осями вращения, что еще раз подтвердило Barbour et al.исследование. Однако следует отметить, что это было основано только на стандартных условиях тестирования. Ожидается, что условия испытаний, использованные в этом исследовании, будут отражать соответствующий контакт тазобедренного сустава, что приводит к идеализированному износу двух тел. 6 Широкий спектр условий in vivo, включая вариации хирургического положения имплантата тазобедренного сустава, конструкции протеза, действий и условий пациента 62–64 , может привести к более широкому разнообразию рубцов износа по сравнению со стандартными условиями используемые в симуляторах в этом исследовании.
Тем не менее, простота симулятора с двумя осями вращения по-прежнему позволяет применять клинически значимые траектории износа с правильной фазой и величиной каждой оси вращения, как обсуждалось Barbour et al. 29 В этом исследовании были получены сходные скорости износа полиэтилена в условиях двух осей вращения по сравнению с полными тремя осями вращения, что еще раз подтвердило Barbour et al.исследование. Однако следует отметить, что это было основано только на стандартных условиях тестирования. Ожидается, что условия испытаний, использованные в этом исследовании, будут отражать соответствующий контакт тазобедренного сустава, что приводит к идеализированному износу двух тел. 6 Широкий спектр условий in vivo, включая вариации хирургического положения имплантата тазобедренного сустава, конструкции протеза, действий и условий пациента 62–64 , может привести к более широкому разнообразию рубцов износа по сравнению со стандартными условиями используемые в симуляторах в этом исследовании.
Это исследование подтвердило важность разработки тренажеров со станциями контроля нагрузки для определения деформации ползучести полиэтилена для геометрических оценок. Это не полностью воспроизводит динамическую ползучесть сочленяющихся поверхностей; тем не менее, это практичный способ мониторинга деформации ползучести, избегая скользящего контакта между головкой бедренной кости и вертлужной впадиной. Скорость износа обычного полиэтилена была значительно снижена с введением умеренно и сильно сшитого полиэтилена.Следовательно, необходимо использовать пропитанные образцы для контроля уровня поглощения жидкости во время испытания 55,65,66 и для корректировки гравиметрических измерений, замаскированных поглощением жидкости.
Несмотря на то, что сравнение скоростей износа между тренажерами может предложить начальную форму проверки недавно разработанных тренажеров, следует избегать прямого сравнения скоростей износа. Крайне важно понимать конструкцию и механику симуляторов, используемых для тестирования in vitro, и обеспечивать воспроизведение клинически значимых движений тазобедренного сустава. Двухосевые симуляторы использовались в предыдущих исследованиях из-за их простоты по сравнению с трехосными симуляторами; однако потребность в передовых методах доклинических испытаний 62–64 привела к разработке более сложных симуляторов. Применение и управление нагрузкой и движением тазобедренного сустава с помощью двигателей обеспечило стабильный и в высокой степени соответствующий входным профилям выходной сигнал; поэтому это рекомендуемое решение для будущей конструкции тренажеров бедра. Более высокая точность и точность выходных нагрузок от электромеханического симулятора по сравнению с пневматическим симулятором, а также включение вращения приведения/отведения для полных трех осей вращения являются важными соображениями для симуляторов, используемых для будущих доклинических испытаний.
Двухосевые симуляторы использовались в предыдущих исследованиях из-за их простоты по сравнению с трехосными симуляторами; однако потребность в передовых методах доклинических испытаний 62–64 привела к разработке более сложных симуляторов. Применение и управление нагрузкой и движением тазобедренного сустава с помощью двигателей обеспечило стабильный и в высокой степени соответствующий входным профилям выходной сигнал; поэтому это рекомендуемое решение для будущей конструкции тренажеров бедра. Более высокая точность и точность выходных нагрузок от электромеханического симулятора по сравнению с пневматическим симулятором, а также включение вращения приведения/отведения для полных трех осей вращения являются важными соображениями для симуляторов, используемых для будущих доклинических испытаний.
В будущих исследованиях будет рассмотрено влияние кинематики в условиях двухосного и трехосного вращения с неблагоприятными условиями микросепарации. 67,68 Тестирование эндопротезов тазобедренного сустава в этих условиях является одним из примеров, указанных в стратифицированном подходе к повышению надежности (SAFER) для удовлетворения текущих и будущих требований к более безопасным и надежным эндопротезам тазобедренного сустава. 62–64 Эти подходы подтверждают важность разработки и понимания текущих и будущих методов тестирования in vitro для доклинических испытаний.
62–64 Эти подходы подтверждают важность разработки и понимания текущих и будущих методов тестирования in vitro для доклинических испытаний.
Сноски
Декларация о конфликте интересов: Автор(ы) заявили о следующих потенциальных конфликтах интересов в отношении исследования, авторства и/или публикации этой статьи: С. Уильямс является консультантом DePuy Synthes Joint Реконструкция. Дж. Фишер является консультантом DePuy Synthes Joint Reconstruction and Simulation Solutions и Invibio.
Финансирование: Автор(ы) раскрыл(и) получение следующей финансовой поддержки для исследования, авторства и/или публикации этой статьи: Это исследование было поддержано DePuy Synthes, компанией Johnson & Johnson, и Innovation and Центр знаний в области медицинских технологий, финансируемый EPSRC, TSB и BBSRC.Он частично финансировался через WELMEC, Центр передового опыта в области медицинской инженерии, финансируемый Wellcome Trust и EPSRC, под номером гранта WT 088908/Z/09/Z, а также Центром инновационного производства медицинских устройств EPSRC. Дж. Ф. является старшим исследователем NIHR, и его исследования поддерживались Отделом биомедицинских исследований опорно-двигательного аппарата NIHR в Лидсе. DePuy Synthes поставила компоненты.
Дж. Ф. является старшим исследователем NIHR, и его исследования поддерживались Отделом биомедицинских исследований опорно-двигательного аппарата NIHR в Лидсе. DePuy Synthes поставила компоненты.
Каталожные номера
1. Аффатато С., Леардини В., Заваллони М. Тренажеры тазобедренного сустава: современное состояние.В: Бенаццо Ф., Фалез Ф., Дитрих М. (ред.) Биокерамика и альтернативные подшипники в эндопротезировании суставов. Дармштадт: Стейнкопф, 2006, стр. 171–180. [Google Академия]2. Аффатато С., Спинелли М., Заваллони М. и др. Трибология и полная замена тазобедренного сустава: современные концепции механического моделирования. Медицинская физика 2008 г.; 30: 1305–1317. [PubMed] [Google Scholar]3. Сайкко В.О. Износ полиэтиленовых ацетабулярных чашек относительно головок бедренных костей из оксида алюминия – 5 протезов в сравнении с симулятором тазобедренного сустава на протяжении 35 млн циклов ходьбы.Acta Orthop Scand 1993 год; 64: 507–512. [PubMed] [Google Scholar]4. Сайкко В. О., Пааволайнен П.О., Слатис П.
Ношение полиэтиленовой вертлужной чашки. Сравнение металлической и керамической головок в тренажере тазобедренного сустава. Acta Orthop Scand
1993 год; 64: 391–402. [PubMed] [Google Scholar]5.
Бигсби Р.Дж.А., Хардакер С.С., Фишер Дж.
Ношение ацетабулярных чашек из сверхвысокомолекулярного полиэтилена на физиологическом тренажере тазобедренного сустава в анатомическом положении с использованием бычьей сыворотки в качестве смазки. Proc IMechE, часть H: инженерия в медицине
1997 год; 211: 265–269.[PubMed] [Google Scholar]6.
Маккеллоп Х.А., Кэмпбелл П., Парк С.Х. и др.
Происхождение субмикронных частиц износа полиэтилена при тотальном эндопротезировании тазобедренного сустава. Clin Orthop Relat Res
1995 год; 311: 3–20. [PubMed] [Google Scholar]7.
Ингам Э., Фишер Дж.
Биологические реакции на продукты износа при полной замене суставов. Proc IMechE, часть H: инженерия в медицине
2000 г.; 214: 21–37. [PubMed] [Google Scholar]8.
Виллерт Х.Г., Семлич М.
Реакции суставной капсулы на износ изделий искусственных суставных протезов.
О., Пааволайнен П.О., Слатис П.
Ношение полиэтиленовой вертлужной чашки. Сравнение металлической и керамической головок в тренажере тазобедренного сустава. Acta Orthop Scand
1993 год; 64: 391–402. [PubMed] [Google Scholar]5.
Бигсби Р.Дж.А., Хардакер С.С., Фишер Дж.
Ношение ацетабулярных чашек из сверхвысокомолекулярного полиэтилена на физиологическом тренажере тазобедренного сустава в анатомическом положении с использованием бычьей сыворотки в качестве смазки. Proc IMechE, часть H: инженерия в медицине
1997 год; 211: 265–269.[PubMed] [Google Scholar]6.
Маккеллоп Х.А., Кэмпбелл П., Парк С.Х. и др.
Происхождение субмикронных частиц износа полиэтилена при тотальном эндопротезировании тазобедренного сустава. Clin Orthop Relat Res
1995 год; 311: 3–20. [PubMed] [Google Scholar]7.
Ингам Э., Фишер Дж.
Биологические реакции на продукты износа при полной замене суставов. Proc IMechE, часть H: инженерия в медицине
2000 г.; 214: 21–37. [PubMed] [Google Scholar]8.
Виллерт Х.Г., Семлич М.
Реакции суставной капсулы на износ изделий искусственных суставных протезов. J Biomed Mater Res
1977 год; 11: 157–164. [PubMed] [Google Scholar]9.
ИСО 14242-1:2014. Имплантаты для хирургии – износ полных протезов тазобедренного сустава – часть 1: параметры нагрузки и смещения для испытательных машин и соответствующие условия окружающей среды для испытаний. [Google Академия] 10.
Барбур ПСМ, Стоун М.Х., Фишер Дж.
Исследование на симуляторе тазобедренного сустава с использованием новых и физиологически поцарапанных головок бедренных костей с вертлужными чашками из полиэтилена сверхвысокой молекулярной массы. Proc IMechE, часть H: инженерия в медицине
2000 г.; 214: 569–576.[PubMed] [Google Scholar] 11.
МакКеллоп Х., Шен Ф.В., Лу Б. и др.
Влияние способа стерилизации и других модификаций на износостойкость вертлужных чашек из сверхвысокомолекулярного полиэтилена. J Bone Joint Surg Am
2000 г.; 82: 1708–1725. [PubMed] [Google Scholar] 12.
Бергманн Г., Дойретцбахер Г., Хеллер М. и др.
Силы контакта бедра и модели походки от рутинной деятельности. Джей Биомех
2001 г.; 34: 859–871.
J Biomed Mater Res
1977 год; 11: 157–164. [PubMed] [Google Scholar]9.
ИСО 14242-1:2014. Имплантаты для хирургии – износ полных протезов тазобедренного сустава – часть 1: параметры нагрузки и смещения для испытательных машин и соответствующие условия окружающей среды для испытаний. [Google Академия] 10.
Барбур ПСМ, Стоун М.Х., Фишер Дж.
Исследование на симуляторе тазобедренного сустава с использованием новых и физиологически поцарапанных головок бедренных костей с вертлужными чашками из полиэтилена сверхвысокой молекулярной массы. Proc IMechE, часть H: инженерия в медицине
2000 г.; 214: 569–576.[PubMed] [Google Scholar] 11.
МакКеллоп Х., Шен Ф.В., Лу Б. и др.
Влияние способа стерилизации и других модификаций на износостойкость вертлужных чашек из сверхвысокомолекулярного полиэтилена. J Bone Joint Surg Am
2000 г.; 82: 1708–1725. [PubMed] [Google Scholar] 12.
Бергманн Г., Дойретцбахер Г., Хеллер М. и др.
Силы контакта бедра и модели походки от рутинной деятельности. Джей Биомех
2001 г.; 34: 859–871. [PubMed] [Google Scholar] 13.
Бергманн Г., Грайхен Ф., Ролманн А. и соавт.
Реалистичные нагрузки для тестирования тазобедренных имплантатов.Биомед Матер Инг
2010 г.; 20: 65–75. [PubMed] [Google Scholar] 14.
Дафф-Барклай I, Спиллман Д.Т.
Документ 10: Полные протезы тазобедренного сустава человека – лабораторное исследование трения и износа. Proc IMechE, часть H: инженерия в медицине
1966 год; 181: 90–103. [Google Академия] 15.
Скейлс Дж.Т., Келли П., Годдард Д.
Исследования момента трения при полной замене суставов с использованием симулятора. Энн Реум Дис
1969 год; 28: 30–35. [Бесплатная статья PMC] [PubMed] [Google Scholar]16.
Уокер PS, Gold BL.
Трибология (трение, смазка и износ) цельнометаллических искусственных тазобедренных суставов.Носить
1971 год; 17: 285–299. [PubMed] [Google Scholar] 17.
Дамблтон Дж. Х., Миллер Д. А., Миллер Э. Х.
Тренажер для несущих узлов. Носить
1972 год; 20: 165–174. [Google Академия] 18.
Семлич М., Леманн М., Вебер Х. и соавт.
Новые перспективы увеличения функционального срока службы искусственных тазобедренных суставов при использовании комбинации материалов полиэтилен/оксид алюминия-керамика/металл.
[PubMed] [Google Scholar] 13.
Бергманн Г., Грайхен Ф., Ролманн А. и соавт.
Реалистичные нагрузки для тестирования тазобедренных имплантатов.Биомед Матер Инг
2010 г.; 20: 65–75. [PubMed] [Google Scholar] 14.
Дафф-Барклай I, Спиллман Д.Т.
Документ 10: Полные протезы тазобедренного сустава человека – лабораторное исследование трения и износа. Proc IMechE, часть H: инженерия в медицине
1966 год; 181: 90–103. [Google Академия] 15.
Скейлс Дж.Т., Келли П., Годдард Д.
Исследования момента трения при полной замене суставов с использованием симулятора. Энн Реум Дис
1969 год; 28: 30–35. [Бесплатная статья PMC] [PubMed] [Google Scholar]16.
Уокер PS, Gold BL.
Трибология (трение, смазка и износ) цельнометаллических искусственных тазобедренных суставов.Носить
1971 год; 17: 285–299. [PubMed] [Google Scholar] 17.
Дамблтон Дж. Х., Миллер Д. А., Миллер Э. Х.
Тренажер для несущих узлов. Носить
1972 год; 20: 165–174. [Google Академия] 18.
Семлич М., Леманн М., Вебер Х. и соавт.
Новые перспективы увеличения функционального срока службы искусственных тазобедренных суставов при использовании комбинации материалов полиэтилен/оксид алюминия-керамика/металл. J Biomed Mater Res
1977 год; 11: 537–552. [PubMed] [Google Scholar] 19.
Кларк ИК.
Износ искусственных суставных материалов IV. Инженер Мед
1981 год; 10: 189–198.[Google Академия] 20.
Доусон Д., Джоббинс Б.
Проектирование и разработка универсального тренажера тазобедренного сустава и предварительная оценка износа и ползучести тазобедренных суставов тотальной замены Charnley. Инженер Мед
1988 год; 17: 111–117. [PubMed] [Google Scholar] 21.
Саикко В.
Тренажерное исследование трения при тотальной замене тазобедренных суставов. Proc IMechE, часть H: инженерия в медицине
1992 год; 206: 201–211. [PubMed] [Google Scholar] 22.
Сайкко В., Пааволайнен П., Клеймола М. и др.
Симулятор тазобедренного сустава с пятью станциями для изучения скорости износа.Proc IMechE, часть H: инженерия в медицине
1992 год; 206: 195–200. [PubMed] [Google Scholar] 23.
Сайкко В.О.
Износ полиэтиленовой вертлужной чашки — влияние материала головки, диаметра головки и толщины чашки изучалось с помощью симулятора бедра. Acta Orthop Scand
1995 год; 66: 501–506.
J Biomed Mater Res
1977 год; 11: 537–552. [PubMed] [Google Scholar] 19.
Кларк ИК.
Износ искусственных суставных материалов IV. Инженер Мед
1981 год; 10: 189–198.[Google Академия] 20.
Доусон Д., Джоббинс Б.
Проектирование и разработка универсального тренажера тазобедренного сустава и предварительная оценка износа и ползучести тазобедренных суставов тотальной замены Charnley. Инженер Мед
1988 год; 17: 111–117. [PubMed] [Google Scholar] 21.
Саикко В.
Тренажерное исследование трения при тотальной замене тазобедренных суставов. Proc IMechE, часть H: инженерия в медицине
1992 год; 206: 201–211. [PubMed] [Google Scholar] 22.
Сайкко В., Пааволайнен П., Клеймола М. и др.
Симулятор тазобедренного сустава с пятью станциями для изучения скорости износа.Proc IMechE, часть H: инженерия в медицине
1992 год; 206: 195–200. [PubMed] [Google Scholar] 23.
Сайкко В.О.
Износ полиэтиленовой вертлужной чашки — влияние материала головки, диаметра головки и толщины чашки изучалось с помощью симулятора бедра. Acta Orthop Scand
1995 год; 66: 501–506. [PubMed] [Google Scholar] 24.
Сайкко В.О.
Трехосевой симулятор тазобедренного сустава для изучения износа и трения полных протезов тазобедренного сустава. Proc IMechE, часть H: инженерия в медицине
1996 год; 210: 175–185. [PubMed] [Google Scholar] 25.Bragdon CR, O’Connor DO, Lowenstein JD, et al.
Значение разнонаправленного движения на износ полиэтилена. Proc IMechE, часть H: инженерия в медицине
1996 год; 210: 157–165. [PubMed] [Google Scholar] 26.
Ван А., Полинени В.К., Старк С. и др.
Влияние шероховатости поверхности головки бедренной кости на износ вертлужных чашек из сверхвысокомолекулярного полиэтилена. J Артропластика
1998 год; 13: 615–620. [PubMed] [Google Scholar] 27.
Сайкко В., Алрус Т.
Тип движения и смазка при моделировании износа полиэтиленовой вертлужной чашки.Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 301–310. [PubMed] [Google Scholar] 28.
Голдсмит AAJ, Доусон Д.
Разработка десятипозиционного многоосевого тренажера тазобедренного сустава. Proc IMechE, часть H: инженерия в медицине
1999 г.
[PubMed] [Google Scholar] 24.
Сайкко В.О.
Трехосевой симулятор тазобедренного сустава для изучения износа и трения полных протезов тазобедренного сустава. Proc IMechE, часть H: инженерия в медицине
1996 год; 210: 175–185. [PubMed] [Google Scholar] 25.Bragdon CR, O’Connor DO, Lowenstein JD, et al.
Значение разнонаправленного движения на износ полиэтилена. Proc IMechE, часть H: инженерия в медицине
1996 год; 210: 157–165. [PubMed] [Google Scholar] 26.
Ван А., Полинени В.К., Старк С. и др.
Влияние шероховатости поверхности головки бедренной кости на износ вертлужных чашек из сверхвысокомолекулярного полиэтилена. J Артропластика
1998 год; 13: 615–620. [PubMed] [Google Scholar] 27.
Сайкко В., Алрус Т.
Тип движения и смазка при моделировании износа полиэтиленовой вертлужной чашки.Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 301–310. [PubMed] [Google Scholar] 28.
Голдсмит AAJ, Доусон Д.
Разработка десятипозиционного многоосевого тренажера тазобедренного сустава. Proc IMechE, часть H: инженерия в медицине
1999 г. ; 213: 311–316. [PubMed] [Google Scholar] 29.
Барбур ПСМ, Стоун М.Х., Фишер Дж.
Исследование на симуляторе тазобедренного сустава с использованием упрощенных циклов нагрузки и движения, генерирующих физиологические траектории и скорости износа. Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 455–467. [PubMed] [Google Scholar] 30.Смит С.Л., Берджесс И.С., Ансворт У.
Оценка тренажера тазобедренного сустава. Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 469–473. [PubMed] [Google Scholar] 31.
Смит С.Л., Ансворт А.
Тренажер тазобедренного сустава на пять позиций. Proc IMechE, часть H: инженерия в медицине
2001 г.; 215: 61–64. [PubMed] [Google Scholar] 32.
Каддик С., Виммер М.А.
Испытание на износ тренажера тазобедренного сустава в соответствии с недавно введенным стандартом ISO 14242. Proc IMechE, Part H: J Engineering in Medicine
2001 г.; 215: 429–442. [PubMed] [Google Scholar] 33.Сайкко В., Алрус Т., Калониус О. и др.
Моделирование износа полных протезов тазобедренного сустава с использованием полиэтилена по сравнению с CoCr, оксидом алюминия и алмазоподобным углеродом.
; 213: 311–316. [PubMed] [Google Scholar] 29.
Барбур ПСМ, Стоун М.Х., Фишер Дж.
Исследование на симуляторе тазобедренного сустава с использованием упрощенных циклов нагрузки и движения, генерирующих физиологические траектории и скорости износа. Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 455–467. [PubMed] [Google Scholar] 30.Смит С.Л., Берджесс И.С., Ансворт У.
Оценка тренажера тазобедренного сустава. Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 469–473. [PubMed] [Google Scholar] 31.
Смит С.Л., Ансворт А.
Тренажер тазобедренного сустава на пять позиций. Proc IMechE, часть H: инженерия в медицине
2001 г.; 215: 61–64. [PubMed] [Google Scholar] 32.
Каддик С., Виммер М.А.
Испытание на износ тренажера тазобедренного сустава в соответствии с недавно введенным стандартом ISO 14242. Proc IMechE, Part H: J Engineering in Medicine
2001 г.; 215: 429–442. [PubMed] [Google Scholar] 33.Сайкко В., Алрус Т., Калониус О. и др.
Моделирование износа полных протезов тазобедренного сустава с использованием полиэтилена по сравнению с CoCr, оксидом алюминия и алмазоподобным углеродом. Биоматериалы
2001 г.; 22: 1507–1514. [PubMed] [Google Scholar] 34.
Калониус О, Сайкко В.
Анализ слайдов восьми современных моделей тренажеров для тазобедренного сустава. Джей Биомех
2002 г.; 35: 1439–1450. [PubMed] [Google Scholar] 35.
Bragdon CR, Jasty M, Muratoglu OK, et al.
Износ третьего тела из высокосшитого полиэтилена в симуляторе бедра. J Артропластика
2003 г.; 18: 553–561.[PubMed] [Google Scholar] 36.
Мизоуэ Т., Ямамото К., Масаока Т. и др.
Проверка объема износа вертлужной впадины на основе прямых и двумерных измерений: анализ симулятора тазобедренного сустава. J ортопедическая наука
2003 г.; 8: 491–499. [PubMed] [Google Scholar] 37.
Эсснер А., Саттон К., Ван А.
Сравнение износа на симуляторе тазобедренного сустава подшипников типа металл-металл, керамика-керамика и подшипников из сверхвысокомолекулярного полиэтилена с поперечными связями. Носить
2005 г.; 259: 992–995. [Google Академия] 38.
Саикко В.
Анатомический тренажер тазобедренного сустава на 12 позиций. Proc IMechE, часть H: инженерия в медицине
2005 г.
Биоматериалы
2001 г.; 22: 1507–1514. [PubMed] [Google Scholar] 34.
Калониус О, Сайкко В.
Анализ слайдов восьми современных моделей тренажеров для тазобедренного сустава. Джей Биомех
2002 г.; 35: 1439–1450. [PubMed] [Google Scholar] 35.
Bragdon CR, Jasty M, Muratoglu OK, et al.
Износ третьего тела из высокосшитого полиэтилена в симуляторе бедра. J Артропластика
2003 г.; 18: 553–561.[PubMed] [Google Scholar] 36.
Мизоуэ Т., Ямамото К., Масаока Т. и др.
Проверка объема износа вертлужной впадины на основе прямых и двумерных измерений: анализ симулятора тазобедренного сустава. J ортопедическая наука
2003 г.; 8: 491–499. [PubMed] [Google Scholar] 37.
Эсснер А., Саттон К., Ван А.
Сравнение износа на симуляторе тазобедренного сустава подшипников типа металл-металл, керамика-керамика и подшипников из сверхвысокомолекулярного полиэтилена с поперечными связями. Носить
2005 г.; 259: 992–995. [Google Академия] 38.
Саикко В.
Анатомический тренажер тазобедренного сустава на 12 позиций. Proc IMechE, часть H: инженерия в медицине
2005 г. ; 219: 437–448.[PubMed] [Google Scholar] 39.
Фишер Дж., Джин З., Типпер Дж. и др.
Трибология альтернативных подшипников. Clin Orthop Relat Res
2006 г.; 453: 25–34. [PubMed] [Google Scholar]40.
Вроблевский Б.М., Синей П.Д., Флеминг П.А.
Эндопротезирование тазобедренного сустава с низким коэффициентом трения с использованием алюмокерамики и сшитого полиэтилена – отчет о десятилетнем наблюдении. J Bone Joint Surg Br
1999 г.; 81: 54–55. [PubMed] [Google Scholar]41.
Вроблевский Б.М., Синей П.Д., Флеминг А.
Эндопротезирование с низким коэффициентом трения по Чарнли у пациентов в возрасте до 51 года – наблюдение до 33 лет.J Bone Joint Surg Br
2002 г.; 84: 540–543. [PubMed] [Google Scholar]42.
Национальный объединенный реестр. Национальный объединенный реестр Англии, Уэльса и Северной Ирландии — 11-й годовой отчет за 2014 г., http://www.njrreports.org.uk/43.
Мэннинг Д.В., Чианг П.П., Мартелл Дж.М. и др.
In vivo сравнительное исследование износа традиционного и высокосшитого полиэтилена при тотальном эндопротезировании тазобедренного сустава.
; 219: 437–448.[PubMed] [Google Scholar] 39.
Фишер Дж., Джин З., Типпер Дж. и др.
Трибология альтернативных подшипников. Clin Orthop Relat Res
2006 г.; 453: 25–34. [PubMed] [Google Scholar]40.
Вроблевский Б.М., Синей П.Д., Флеминг П.А.
Эндопротезирование тазобедренного сустава с низким коэффициентом трения с использованием алюмокерамики и сшитого полиэтилена – отчет о десятилетнем наблюдении. J Bone Joint Surg Br
1999 г.; 81: 54–55. [PubMed] [Google Scholar]41.
Вроблевский Б.М., Синей П.Д., Флеминг А.
Эндопротезирование с низким коэффициентом трения по Чарнли у пациентов в возрасте до 51 года – наблюдение до 33 лет.J Bone Joint Surg Br
2002 г.; 84: 540–543. [PubMed] [Google Scholar]42.
Национальный объединенный реестр. Национальный объединенный реестр Англии, Уэльса и Северной Ирландии — 11-й годовой отчет за 2014 г., http://www.njrreports.org.uk/43.
Мэннинг Д.В., Чианг П.П., Мартелл Дж.М. и др.
In vivo сравнительное исследование износа традиционного и высокосшитого полиэтилена при тотальном эндопротезировании тазобедренного сустава. J Артропластика
2005 г.; 20: 880–886. [PubMed] [Google Scholar]44.
Глин-Джонс С., Исаак С., Хауптфляйш Дж. и др.
Действительно ли высокосшитый полиэтилен изнашивается меньше, чем обычный полиэтилен при тотальном эндопротезировании тазобедренного сустава? Двойное слепое, рандомизированное и контролируемое исследование с использованием рентгеностереофотограмметрического анализа.J Артропластика
2008 г.; 23: 337–343. [PubMed] [Google Scholar]45.
Башьял Р.К., Эберхардт Дж., Мальчау Х.
Полиэтилен сверхвысокой молекулярной массы с высокой степенью сшивки в тотальном эндопротезировании тазобедренного сустава: больше никаких опасений не вызывает — подтверждаю. Семин Артропластика
2011 г.; 22: 79–81. [Google Академия] 46.
Курц С., Гавел Х., Патель Дж.
История и систематический обзор результатов износа и остеолиза высокосшитого полиэтилена первого поколения. Clin Orthop Relat Res
2011 г.; 469: 2262–2277. [Бесплатная статья PMC] [PubMed] [Google Scholar]47.Kuzyk PRT, Saccone M, Sprague S, et al.
Сравнение сшитого полиэтилена и обычного полиэтилена для тотального эндопротезирования тазобедренного сустава: метаанализ рандомизированных контролируемых исследований.
J Артропластика
2005 г.; 20: 880–886. [PubMed] [Google Scholar]44.
Глин-Джонс С., Исаак С., Хауптфляйш Дж. и др.
Действительно ли высокосшитый полиэтилен изнашивается меньше, чем обычный полиэтилен при тотальном эндопротезировании тазобедренного сустава? Двойное слепое, рандомизированное и контролируемое исследование с использованием рентгеностереофотограмметрического анализа.J Артропластика
2008 г.; 23: 337–343. [PubMed] [Google Scholar]45.
Башьял Р.К., Эберхардт Дж., Мальчау Х.
Полиэтилен сверхвысокой молекулярной массы с высокой степенью сшивки в тотальном эндопротезировании тазобедренного сустава: больше никаких опасений не вызывает — подтверждаю. Семин Артропластика
2011 г.; 22: 79–81. [Google Академия] 46.
Курц С., Гавел Х., Патель Дж.
История и систематический обзор результатов износа и остеолиза высокосшитого полиэтилена первого поколения. Clin Orthop Relat Res
2011 г.; 469: 2262–2277. [Бесплатная статья PMC] [PubMed] [Google Scholar]47.Kuzyk PRT, Saccone M, Sprague S, et al.
Сравнение сшитого полиэтилена и обычного полиэтилена для тотального эндопротезирования тазобедренного сустава: метаанализ рандомизированных контролируемых исследований. J Bone Joint Surg Br
2011 г.; 93: 593–600. [PubMed] [Google Scholar]48.
Ван А.
Единая теория износа полиэтилена сверхвысокой молекулярной массы при разнонаправленном скольжении. Носить
2001 г.; 248: 38–47. [Google Академия] 49.
Турелл М., Ван А.Г., Белларе А.
Количественная оценка влияния поперечного движения на скорость изнашивания полиэтилена сверхвысокой молекулярной массы.Носить
2003 г.; 255: 1034–1039. [Google Академия]50.
Абдельгаид А., Брокетт С.Л., Лю Ф. и др.
Количественная оценка влияния поперечного сдвига и приложенного номинального контактного давления на износ умеренно сшитого полиэтилена. Proc IMechE, часть H: инженерия в медицине
2013; 227: 18–26. [PubMed] [Google Scholar]51.
Galvin AL, Ingham E, Stone MH, et al.
Проникновение, ползучесть и износ высокосшитого СВМПЭ в симуляторе тазобедренного сустава. J Bone Joint Surg Br
2006 г.; 88: 236. [Google Scholar]52.
Галвин А.Л., Дженнингс Л.М., Типпер Дж.Л. и др.Износ и ползучесть высокосшитого полиэтилена по отношению к кобальт-хромовым и керамическим головкам бедренных костей.
J Bone Joint Surg Br
2011 г.; 93: 593–600. [PubMed] [Google Scholar]48.
Ван А.
Единая теория износа полиэтилена сверхвысокой молекулярной массы при разнонаправленном скольжении. Носить
2001 г.; 248: 38–47. [Google Академия] 49.
Турелл М., Ван А.Г., Белларе А.
Количественная оценка влияния поперечного движения на скорость изнашивания полиэтилена сверхвысокой молекулярной массы.Носить
2003 г.; 255: 1034–1039. [Google Академия]50.
Абдельгаид А., Брокетт С.Л., Лю Ф. и др.
Количественная оценка влияния поперечного сдвига и приложенного номинального контактного давления на износ умеренно сшитого полиэтилена. Proc IMechE, часть H: инженерия в медицине
2013; 227: 18–26. [PubMed] [Google Scholar]51.
Galvin AL, Ingham E, Stone MH, et al.
Проникновение, ползучесть и износ высокосшитого СВМПЭ в симуляторе тазобедренного сустава. J Bone Joint Surg Br
2006 г.; 88: 236. [Google Scholar]52.
Галвин А.Л., Дженнингс Л.М., Типпер Дж.Л. и др.Износ и ползучесть высокосшитого полиэтилена по отношению к кобальт-хромовым и керамическим головкам бедренных костей. Proc IMechE, часть H: инженерия в медицине
2010 г.; 224: 1175–1183. [PubMed] [Google Scholar]53.
Engh CA, Jr, Hopper RH, Jr, Huynh C, et al.
Проспективное рандомизированное исследование сшитого и несшитого полиэтилена для тотального эндопротезирования тазобедренного сустава при 10-летнем наблюдении. J Артропластика
2012 г.; 27:2–7.e1. [PubMed] [Google Scholar]54.
Бедард Н.А., Каллаган Дж.Дж., Штефл М.Д. и соавт.
Фиксация и ношение с использованием современного вертлужного компонента и сшитого полиэтилена при последующем наблюдении не менее 10 лет.J Артропластика
2014; 29: 1961–1969. [PubMed] [Google Scholar]55.
Муратоглу О.К., Брэгдон К.Р., О’Коннор Д.О. и др.
Новый метод сшивания полиэтилена сверхвысокой молекулярной массы для улучшения износа, снижения окисления и сохранения механических свойств: лауреат премии HAP Paul Award 1999 года. J Артропластика
2001 г.; 16: 149–160. [PubMed] [Google Scholar]56.
Голдсмит AAJ, Доусон Д.
Исследование на многостанционном симуляторе тазобедренного сустава для полной замены тазобедренных суставов диаметром 22 мм из циркония и сверхвысокомолекулярного полиэтилена.
Proc IMechE, часть H: инженерия в медицине
2010 г.; 224: 1175–1183. [PubMed] [Google Scholar]53.
Engh CA, Jr, Hopper RH, Jr, Huynh C, et al.
Проспективное рандомизированное исследование сшитого и несшитого полиэтилена для тотального эндопротезирования тазобедренного сустава при 10-летнем наблюдении. J Артропластика
2012 г.; 27:2–7.e1. [PubMed] [Google Scholar]54.
Бедард Н.А., Каллаган Дж.Дж., Штефл М.Д. и соавт.
Фиксация и ношение с использованием современного вертлужного компонента и сшитого полиэтилена при последующем наблюдении не менее 10 лет.J Артропластика
2014; 29: 1961–1969. [PubMed] [Google Scholar]55.
Муратоглу О.К., Брэгдон К.Р., О’Коннор Д.О. и др.
Новый метод сшивания полиэтилена сверхвысокой молекулярной массы для улучшения износа, снижения окисления и сохранения механических свойств: лауреат премии HAP Paul Award 1999 года. J Артропластика
2001 г.; 16: 149–160. [PubMed] [Google Scholar]56.
Голдсмит AAJ, Доусон Д.
Исследование на многостанционном симуляторе тазобедренного сустава для полной замены тазобедренных суставов диаметром 22 мм из циркония и сверхвысокомолекулярного полиэтилена. Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 77–90. [PubMed] [Google Scholar]57.
Уильямс С., Лесли И., Исаак Г. и др.
Трибология и износ тазобедренных протезов «металл по металлу»: влияние угла чашки и положения головы. J Bone Joint Surg Am
2008 г.; 90: 111–117. [PubMed] [Google Scholar]58.
Литтл Н., Буш С., Галлахер Дж. и др.
Износ полиэтилена вертлужной впадины, наклон вертлужной впадины и смещение бедренной кости. Clin Orthop Relat Res
2009 г.; 467: 2895–2900. [Бесплатная статья PMC] [PubMed] [Google Scholar]59.Лю Ф., Фишер Дж., Джин З.М.
Компьютерное моделирование износа и ползучести полиэтилена при тотальном эндопротезировании тазобедренного сустава: влияние зазора и диаметра подшипника. Proc IMechE, Часть J: J Инженерная трибология
2012 г.; 226: 552–563. [Google Академия] 61.
Глин-Джонс С., Макларди-Смит П., Гилл Х.С. и др.
Ползучесть и износ высокосшитого полиэтилена: трехлетнее рандомизированное контролируемое исследование с использованием радиостереометрического анализа.
Proc IMechE, часть H: инженерия в медицине
1999 г.; 213: 77–90. [PubMed] [Google Scholar]57.
Уильямс С., Лесли И., Исаак Г. и др.
Трибология и износ тазобедренных протезов «металл по металлу»: влияние угла чашки и положения головы. J Bone Joint Surg Am
2008 г.; 90: 111–117. [PubMed] [Google Scholar]58.
Литтл Н., Буш С., Галлахер Дж. и др.
Износ полиэтилена вертлужной впадины, наклон вертлужной впадины и смещение бедренной кости. Clin Orthop Relat Res
2009 г.; 467: 2895–2900. [Бесплатная статья PMC] [PubMed] [Google Scholar]59.Лю Ф., Фишер Дж., Джин З.М.
Компьютерное моделирование износа и ползучести полиэтилена при тотальном эндопротезировании тазобедренного сустава: влияние зазора и диаметра подшипника. Proc IMechE, Часть J: J Инженерная трибология
2012 г.; 226: 552–563. [Google Академия] 61.
Глин-Джонс С., Макларди-Смит П., Гилл Х.С. и др.
Ползучесть и износ высокосшитого полиэтилена: трехлетнее рандомизированное контролируемое исследование с использованием радиостереометрического анализа. J Bone Joint Surg Br
2008 г.; 90: 556–561. [PubMed] [Google Scholar]62.
Фишер Дж.Стратифицированный подход к доклинической трибологической оценке замен суставов, представляющий более широкий спектр клинических состояний, выходящих за рамки текущего стандарта. Фарадей Обсудить
2012 г.; 156: 59–68. [PubMed] [Google Scholar]63.
Фишер Дж., Аль-Хаджар М., Уильямс С. и др.
Измерение износа in vitro при замене суставов: стратифицированный подход для повышения надежности. «БЕЗОПАСНОЕ» доклиническое симуляционное тестирование. Семин Артропластика
2012 г.; 23: 286–288. [Google Академия]64.
Дженнингс Л.М., Аль-Хаджар М., Брокетт С.Л. и др.(iv) Повышение безопасности и надежности имплантатов для замены суставов. Ортоп Травма
2012 г.; 26: 246–252. [Бесплатная статья PMC] [PubMed] [Google Scholar]65.
Аффатато С., Ванделли С., Бордини Б. и др.
Исследование абсорбции жидкости в стерилизованных и нестерилизованных ацетабулярных чашках из полиэтилена сверхвысокой молекулярной массы (СВМПЭ). Proc IMechE, часть H: инженерия в медицине
2001 г.
J Bone Joint Surg Br
2008 г.; 90: 556–561. [PubMed] [Google Scholar]62.
Фишер Дж.Стратифицированный подход к доклинической трибологической оценке замен суставов, представляющий более широкий спектр клинических состояний, выходящих за рамки текущего стандарта. Фарадей Обсудить
2012 г.; 156: 59–68. [PubMed] [Google Scholar]63.
Фишер Дж., Аль-Хаджар М., Уильямс С. и др.
Измерение износа in vitro при замене суставов: стратифицированный подход для повышения надежности. «БЕЗОПАСНОЕ» доклиническое симуляционное тестирование. Семин Артропластика
2012 г.; 23: 286–288. [Google Академия]64.
Дженнингс Л.М., Аль-Хаджар М., Брокетт С.Л. и др.(iv) Повышение безопасности и надежности имплантатов для замены суставов. Ортоп Травма
2012 г.; 26: 246–252. [Бесплатная статья PMC] [PubMed] [Google Scholar]65.
Аффатато С., Ванделли С., Бордини Б. и др.
Исследование абсорбции жидкости в стерилизованных и нестерилизованных ацетабулярных чашках из полиэтилена сверхвысокой молекулярной массы (СВМПЭ). Proc IMechE, часть H: инженерия в медицине
2001 г. ; 215: 107–111. [PubMed] [Google Scholar]66.
Yao JQ, Blanchet TA, Murphy DJ и др.
Влияние поглощения жидкости на износостойкость ортопедических опорных поверхностей из сверхвысокомолекулярного полиэтилена.Носить
2003 г.; 255: 1113–1120. [Google Академия] 67.
Nevelos JE, Ingham E, Doyle C, et al.
Анализ компонентов из глиноземной керамики, извлеченных из полных протезов бедра Mittelmeier. Биоматериалы
1999 г.; 20: 1833–1840. [PubMed] [Google Scholar]68.
Стюарт Т., Типпер Дж., Штрейхер Р. и др.
Длительный износ ГИП-корунда на алюминиевых подшипниках для THR в условиях микросепарации. J Mater Sci: Mater M
2001 г.; 12: 1053–1056. [PubMed] [Google Scholar]
; 215: 107–111. [PubMed] [Google Scholar]66.
Yao JQ, Blanchet TA, Murphy DJ и др.
Влияние поглощения жидкости на износостойкость ортопедических опорных поверхностей из сверхвысокомолекулярного полиэтилена.Носить
2003 г.; 255: 1113–1120. [Google Академия] 67.
Nevelos JE, Ingham E, Doyle C, et al.
Анализ компонентов из глиноземной керамики, извлеченных из полных протезов бедра Mittelmeier. Биоматериалы
1999 г.; 20: 1833–1840. [PubMed] [Google Scholar]68.
Стюарт Т., Типпер Дж., Штрейхер Р. и др.
Длительный износ ГИП-корунда на алюминиевых подшипниках для THR в условиях микросепарации. J Mater Sci: Mater M
2001 г.; 12: 1053–1056. [PubMed] [Google Scholar]Frontiers | Премия Немецкого общества биомехаников (DGfB) для молодых исследователей, 2019 г.: Доказательство концепции нового тренажера коленного сустава, позволяющего выполнять быстрые движения физиологических мышц и сил реакции опоры
Введение
Для биомеханических in vitro исследований образцов коленного сустава человека были внедрены различные типы симуляторов коленного сустава. Сложность коленного сустава человека требует сложной конструкции таких тренажеров. Принципиально можно провести различие между горизонтальными тренажерами коленного сустава, вертикальными тренажерами, так называемыми Oxford-Rigs, и тренажерами, приводимыми в движение роботизированной рукой.
Сложность коленного сустава человека требует сложной конструкции таких тренажеров. Принципиально можно провести различие между горизонтальными тренажерами коленного сустава, вертикальными тренажерами, так называемыми Oxford-Rigs, и тренажерами, приводимыми в движение роботизированной рукой.
Горизонтальные тренажеры коленного сустава особенно характеризуются горизонтальным положением образцов коленного сустава (Blankevoort et al., 1988; Hirokawa et al., 1991; Torzilli et al., 1994; Bach and Hull, 1995; Dürselen et al., 1995; Омори и др., 1997; Ахмад и др., 1998 г.; Кигути и др., 1999; Стукенборг-Колсман и др., 2002b; Хофер и др., 2011). Как правило, бедро или большеберцовая кость фиксируются к основанию тренажера или к подвижному поворотному рычагу, отвечающему за сгибание и разгибание, а противоположная сторона обеспечивает все необходимые степени свободы (Heinrichs et al., 2017). Системы роботизированных рук (Rudy et al., 1996; Livesay et al., 1997; Li et al., 1999; Lo et al. , 2008; Diermann et al., 2009; Goldsmith et al., 2013) сравнимы с горизонтальными тренажерами, но коленный сустав перемещается по заранее определенной траектории пассивного движения, при которой все внешние силы и моменты, действующие на коленный сустав, минимальны (Lorenz et al., 2013). Oxford-Rig (Kumagai et al., 2002; Lo et al., 2008) характеризуется прямой и вертикальной фиксацией коленного сустава, а также сборки тазобедренного и голеностопного суставов (Zavatsky, 1997). Узел тазобедренного сустава можно перемещать вертикально, тем самым обеспечивая сгибание и разгибание коленного сустава.В качестве разновидности конструкции Oxford-Rig существуют тренажеры удара, имитирующие удары по коленному суставу с помощью падающих грузов (Withrow et al., 2006; Kiapour et al., 2016).
, 2008; Diermann et al., 2009; Goldsmith et al., 2013) сравнимы с горизонтальными тренажерами, но коленный сустав перемещается по заранее определенной траектории пассивного движения, при которой все внешние силы и моменты, действующие на коленный сустав, минимальны (Lorenz et al., 2013). Oxford-Rig (Kumagai et al., 2002; Lo et al., 2008) характеризуется прямой и вертикальной фиксацией коленного сустава, а также сборки тазобедренного и голеностопного суставов (Zavatsky, 1997). Узел тазобедренного сустава можно перемещать вертикально, тем самым обеспечивая сгибание и разгибание коленного сустава.В качестве разновидности конструкции Oxford-Rig существуют тренажеры удара, имитирующие удары по коленному суставу с помощью падающих грузов (Withrow et al., 2006; Kiapour et al., 2016).
Некоторые из этих тренажеров способны имитировать мышечные силы, действующие на коленный сустав. Это реализуется с помощью грузов или приводов и стальных тросов, которые соединяются с костью в местах анатомических вставок или непосредственно с мышцами специальными зажимами. Обычно моделируют четырехглавую мышцу, двуглавую икроножную мышцу или мышцы подколенного сухожилия (Hirokawa et al., 1991; Шумейкер и др., 1993; Бах и Халл, 1995; Дюрселен и др., 1995; Ахмад и др., 1998 г.; Ли и др., 2002; Гилл и др., 2003; Хофер и др., 2011; Хайнрихс и др., 2017). Однако в большинстве случаев прилагаемые мышечные силы относительно невелики и достигают только значений до 200 Н (например, моделирование четырехглавой мышцы; Dürselen et al., 1995; Withrow et al., 2006). Это означает, что ни физиологические условия нагрузки внутри коленного сустава, ни физиологическая сила реакции опоры (вырабатываемая мышечными силами) не могут быть достигнуты.Кроме того, адаптация мышечных усилий с течением времени или с изменением угла сгибания колена редко возможна с современными тренажерами коленного сустава, что приводит к медленным движениям коленного сустава (Stukenborg-Colsman et al., 2002a).
Обычно моделируют четырехглавую мышцу, двуглавую икроножную мышцу или мышцы подколенного сухожилия (Hirokawa et al., 1991; Шумейкер и др., 1993; Бах и Халл, 1995; Дюрселен и др., 1995; Ахмад и др., 1998 г.; Ли и др., 2002; Гилл и др., 2003; Хофер и др., 2011; Хайнрихс и др., 2017). Однако в большинстве случаев прилагаемые мышечные силы относительно невелики и достигают только значений до 200 Н (например, моделирование четырехглавой мышцы; Dürselen et al., 1995; Withrow et al., 2006). Это означает, что ни физиологические условия нагрузки внутри коленного сустава, ни физиологическая сила реакции опоры (вырабатываемая мышечными силами) не могут быть достигнуты.Кроме того, адаптация мышечных усилий с течением времени или с изменением угла сгибания колена редко возможна с современными тренажерами коленного сустава, что приводит к медленным движениям коленного сустава (Stukenborg-Colsman et al., 2002a).
Наиболее распространенными методами создания движения коленного сустава в современных симуляторах коленного сустава являются либо пассивное сгибание колена, либо контроль угла сгибания колена или силы реакции опоры с помощью контура управления мышечной силой (Stukenborg-Colsman et al. , 2002a; Victor et al. ., 2009). Однако, поскольку различные мышцы, разгибающие колени, влияют друг на друга, что приводит к статически неопределенной механической системе, управление в реальном времени несколькими одновременно действующими мышцами трудно осуществить для динамических движений, например, прыжков с парашютом.Следовательно, такие механизмы контура управления, реализованные в современных симуляторах, позволяют выполнять только медленные движения в суставах со скоростью сгибания-разгибания всего ~1°/с (Churchill et al., 1998; Lo et al., 2008), что соответствует квазистатическому условия тестирования. Некоторые из существующих симуляторов коленного сустава типа Oxford-Rig способны имитировать почти физиологические силы реакции опоры или веса тела (Elias et al., 2002; Maletsky and Hillberry, 2005). Эти тренажеры способны имитировать движения со скоростью до 12°/с, что все же намного ниже, чем требуется для прыжкового приземления (145°/с).
, 2002a; Victor et al. ., 2009). Однако, поскольку различные мышцы, разгибающие колени, влияют друг на друга, что приводит к статически неопределенной механической системе, управление в реальном времени несколькими одновременно действующими мышцами трудно осуществить для динамических движений, например, прыжков с парашютом.Следовательно, такие механизмы контура управления, реализованные в современных симуляторах, позволяют выполнять только медленные движения в суставах со скоростью сгибания-разгибания всего ~1°/с (Churchill et al., 1998; Lo et al., 2008), что соответствует квазистатическому условия тестирования. Некоторые из существующих симуляторов коленного сустава типа Oxford-Rig способны имитировать почти физиологические силы реакции опоры или веса тела (Elias et al., 2002; Maletsky and Hillberry, 2005). Эти тренажеры способны имитировать движения со скоростью до 12°/с, что все же намного ниже, чем требуется для прыжкового приземления (145°/с).
Для достижения реальных условий тестирования in vitro , возникающих во время повседневной деятельности, необходимы движения коленного сустава и мышечные силы, приводящие к физиологическим силам реакции суставов и опоры. Таким образом, целью данного исследования была разработка нового симулятора коленного сустава для in vitro тестирования приседаний и прыжков с падением с реалистичными скоростями и усилиями в суставах.
Таким образом, целью данного исследования была разработка нового симулятора коленного сустава для in vitro тестирования приседаний и прыжков с падением с реалистичными скоростями и усилиями в суставах.
Материалы и методы
Техническое описание
Механическая конструкция нового тренажера коленного сустава, основанного на конструкции Oxford-Rig (Bourne et al., 1978), состоит из базовой рамы, узла тазобедренного сустава и узла голеностопного сустава (рис. 1). Узел тазобедренного сустава состоит из универсального шарнира. Он обеспечивает три степени свободы, включая сгибание/разгибание, отведение/приведение и вертикальное линейное смещение. Вертикальное смещение достигается за счет узла тазобедренного сустава, прикрепленного к траверсе, которая может перемещаться вертикально вдоль направляющего шарикоподшипника, приводимого в действие электрическим серводвигателем (EMMS-AS-140-L-HS-RMB, Festo AG & Co. KG, Эсслинген, Германия) с линейной осью при максимальной скорости траверсы 670 мм/с, что соответствует максимальной угловой скорости 350°/с. Следует отметить, что моделирование движения тазобедренного сустава приводит только к сгибанию и разгибанию колена без создания каких-либо сил реакции суставов или опоры. Узел голеностопного сустава имеет две степени свободы: сгибание/разгибание и отведение/приведение. Кроме того, из-за дополнительной опоры большеберцовая кость может свободно вращаться внутрь и наружу. Следовательно, тренажер коленного сустава допускает свободное движение с 6° свободы (Заватский, 1997).
Следует отметить, что моделирование движения тазобедренного сустава приводит только к сгибанию и разгибанию колена без создания каких-либо сил реакции суставов или опоры. Узел голеностопного сустава имеет две степени свободы: сгибание/разгибание и отведение/приведение. Кроме того, из-за дополнительной опоры большеберцовая кость может свободно вращаться внутрь и наружу. Следовательно, тренажер коленного сустава допускает свободное движение с 6° свободы (Заватский, 1997).
Рисунок 1 .Симулятор коленного сустава с моделью коленного сустава, закрепленной между узлами тазобедренного и голеностопного суставов, траверсой для вертикального смещения бедра и пневматическими приводами для имитации мышечной силы.
Девять наиболее важных мышц, разгибающих колени, моделируются для достижения физиологических условий нагрузки и силы реакции опоры. К таким мышцам относятся медиальная широкая мышца, латеральная широкая мышца, промежуточная широкая мышца бедра, прямая мышца бедра, двуглавая мышца бедра, полусухожильная мышца, полуперепончатая мышца, мышечная мышца бедра. gastrocnemius medialis и M. gastrocnemius lateralis. Из-за схожих анатомических направлений растяжения промежуточная мышца широкой мышцы бедра и прямая мышца бедра, а также полусухожильная и полуперепончатая мышцы объединяются и моделируются как мышца одностороннего действия соответственно. Всего для имитации мышечной силы используется семь пневматических приводов (DNCI-63-300-P-A, Festo AG & Co. KG), которые расположены в верхней и нижней частях базовой рамы. Бикортикальные винты располагаются в местах анатомического прикрепления соответствующих мышц.Стальные тросы соединяют пневматические приводы и бикортикальные винты для моделирования мышечной силы. Семь одноосных датчиков силы (KD40S, ME-Messsysteme GmbH, Хеннингсдорф, Германия) встроены в стальные тросы для измерения прилагаемой мышечной силы соответственно. Кроме того, линейный пневматический привод и ротационный пневматический привод расположены под узлом голеностопного сустава для имитации осевых ударных нагрузок и моментов деформации большеберцовой кости соответственно.
gastrocnemius medialis и M. gastrocnemius lateralis. Из-за схожих анатомических направлений растяжения промежуточная мышца широкой мышцы бедра и прямая мышца бедра, а также полусухожильная и полуперепончатая мышцы объединяются и моделируются как мышца одностороннего действия соответственно. Всего для имитации мышечной силы используется семь пневматических приводов (DNCI-63-300-P-A, Festo AG & Co. KG), которые расположены в верхней и нижней частях базовой рамы. Бикортикальные винты располагаются в местах анатомического прикрепления соответствующих мышц.Стальные тросы соединяют пневматические приводы и бикортикальные винты для моделирования мышечной силы. Семь одноосных датчиков силы (KD40S, ME-Messsysteme GmbH, Хеннингсдорф, Германия) встроены в стальные тросы для измерения прилагаемой мышечной силы соответственно. Кроме того, линейный пневматический привод и ротационный пневматический привод расположены под узлом голеностопного сустава для имитации осевых ударных нагрузок и моментов деформации большеберцовой кости соответственно. Для измерения сил и моментов опорной реакции непосредственно под узлом голеностопного сустава закреплен шестиосевой датчик силы/крутящего момента (K6D68, ME-Messsysteme GmbH).Таким образом, движение бедра вызывает сгибание и разгибание коленного сустава, в то время как семь пневматических приводов используются для имитации мышечных сил, которые приводят к соответствующим силам реакции опоры. То есть без симуляции мышечной силы не было бы результирующей силы реакции опоры, а было бы только сгибание и разгибание в коленном суставе.
Для измерения сил и моментов опорной реакции непосредственно под узлом голеностопного сустава закреплен шестиосевой датчик силы/крутящего момента (K6D68, ME-Messsysteme GmbH).Таким образом, движение бедра вызывает сгибание и разгибание коленного сустава, в то время как семь пневматических приводов используются для имитации мышечных сил, которые приводят к соответствующим силам реакции опоры. То есть без симуляции мышечной силы не было бы результирующей силы реакции опоры, а было бы только сгибание и разгибание в коленном суставе.
Тренажер предназначен для работы в сочетании режимов позиционного и силового управления (рис. 2). Контролируемое положением линейное смещение бедра напрямую связано со сгибанием и разгибанием коленного сустава.Мышечные силы применяются в контролируемом по силе режиме. Для этих целей как линейное перемещение тазобедренного сустава как функция во времени, так и мышечные силы как функция во времени служат входными параметрами для симулятора коленного сустава. Эти исходные значения были получены в результате комбинированного анализа движения и исследования обратной динамики (MAID) на 11 здоровых добровольцах, проведенного в лаборатории движения партнера по сотрудничеству (Клиника ортопедии и травматологии, Университетская клиника Гейдельберга, Гейдельберг, Германия).При этом измерялись кинематика и кинетика испытуемых. Эти значения вместе с антропометрическими данными использовались для расчета действующих мышечных сил посредством обратного динамического моделирования опорно-двигательного аппарата.
Эти исходные значения были получены в результате комбинированного анализа движения и исследования обратной динамики (MAID) на 11 здоровых добровольцах, проведенного в лаборатории движения партнера по сотрудничеству (Клиника ортопедии и травматологии, Университетская клиника Гейдельберга, Гейдельберг, Германия).При этом измерялись кинематика и кинетика испытуемых. Эти значения вместе с антропометрическими данными использовались для расчета действующих мышечных сил посредством обратного динамического моделирования опорно-двигательного аппарата.
Рисунок 2 . Управление динамическим симулятором коленного сустава с помощью системы реального времени, инструмента конфигурации Festo для параметризации, управления пневматическими и электрическими приводами, регистрации датчиков силы и приложений LabVIEW и LabVIEW реального времени.
Входные параметры мышечных сил и положения бедра, полученные в ходе исследования MAID, были присвоены соответствующим исполнительным механизмам (параметризация) с помощью пневматического инструмента настройки (Festo AG & Co. KG) (рис. 2). Одновременное управление всеми приводами осуществляется с помощью системы реального времени (cRIO-9064, National Instruments, Остин, Техас, США) и специального программного приложения (LabVIEW 2014, National Instruments). Сбор данных с одноосных датчиков мышечной силы и шестиосевого датчика силы/крутящего момента реакции опоры осуществляется с помощью другого специализированного приложения LabVIEW (National Instruments).Оба приложения обеспечивают быстрое управление в режиме реального времени, обработку сигналов и сбор данных.
KG) (рис. 2). Одновременное управление всеми приводами осуществляется с помощью системы реального времени (cRIO-9064, National Instruments, Остин, Техас, США) и специального программного приложения (LabVIEW 2014, National Instruments). Сбор данных с одноосных датчиков мышечной силы и шестиосевого датчика силы/крутящего момента реакции опоры осуществляется с помощью другого специализированного приложения LabVIEW (National Instruments).Оба приложения обеспечивают быстрое управление в режиме реального времени, обработку сигналов и сбор данных.
Комбинированный анализ движения и обратное динамическое исследование (MAID)
Одиннадцать здоровых взрослых (шесть женщин, пять мужчин, возраст = 30,9 ± 9,3 года, вес = 71,8 ± 17,1 кг, рост = 1,77 ± 0,11 м) были обследованы в тематическом исследовании (разрешение IRB № S-081/2015 Гейдельбергского университета). ). Трехмерный (3D) анализ движения был выполнен с помощью оптоэлектронной системы с 12 камерами (Vicon Motion Systems Ltd. , Оксфорд, Англия), работающей на частоте 120 Гц.Протоколом маркеров, использованным для этого исследования, был набор маркеров нижней части тела Plugin-Gait (Vicon Motion Systems, Оксфорд, Великобритания) с дополнительными маркерами на грудной клетке субъекта (остистый отросток 7-го шейного позвонка, левый и правый акромион и яремная вырезка). а также на медиальной лодыжке и медиальном мыщелке бедра. Кроме того, две платформы для измерения силы (Kistler Instruments AG, Винтертур, Швейцария) использовались для синхронного сбора кинетических данных с частотой 1080 Гц. Совместная кинематика и кинетика сустава были получены с использованием подхода уравнений обратной динамики с программным обеспечением Plugin-Gait (Vicon Nexus 2.0, Vicon Motion Systems, Оксфорд, Великобритания) вслед за Kadaba et al. и Дэвис и др. Испытуемые выполняли медленные приседания со сгибанием колена от 0° до 70° и прыжок на две ноги с высоты 30 см для получения различных наборов данных. Следовательно, были определены движения и положения тазобедренного, коленного и голеностопного суставов с результирующими углами сгибания и опорными реакциями.
, Оксфорд, Англия), работающей на частоте 120 Гц.Протоколом маркеров, использованным для этого исследования, был набор маркеров нижней части тела Plugin-Gait (Vicon Motion Systems, Оксфорд, Великобритания) с дополнительными маркерами на грудной клетке субъекта (остистый отросток 7-го шейного позвонка, левый и правый акромион и яремная вырезка). а также на медиальной лодыжке и медиальном мыщелке бедра. Кроме того, две платформы для измерения силы (Kistler Instruments AG, Винтертур, Швейцария) использовались для синхронного сбора кинетических данных с частотой 1080 Гц. Совместная кинематика и кинетика сустава были получены с использованием подхода уравнений обратной динамики с программным обеспечением Plugin-Gait (Vicon Nexus 2.0, Vicon Motion Systems, Оксфорд, Великобритания) вслед за Kadaba et al. и Дэвис и др. Испытуемые выполняли медленные приседания со сгибанием колена от 0° до 70° и прыжок на две ноги с высоты 30 см для получения различных наборов данных. Следовательно, были определены движения и положения тазобедренного, коленного и голеностопного суставов с результирующими углами сгибания и опорными реакциями. Эти данные использовались для расчета мышечных сил, действующих на коленный сустав с течением времени, с использованием общей скелетно-мышечной модели всего тела для анализа данных движения в OpenSim 3.3 (Дельп и др., 2007). Плюснефаланговые и подтаранные суставы фиксировались в анатомически нейтральных положениях для всех анализов, как это недавно сделали другие авторы (O’Connor et al., 2018). Фильтр нижних частот четвертого порядка с нулевой задержкой и частотой среза 10 Гц применялся к силам реакции грунта, тогда как фильтр Вольтринга с MSE 10 применялся для сглаживания кинематических данных (Woltring, 1991). Входные данные для модели были созданы с использованием пользовательских подпрограмм MATLAB (2014b, The MathWorks, Inc., Натик, Массачусетс, США) на основе сценариев MATLAB для обработки данных из simtk.сайт орг. Модель была масштабирована в соответствии с размерами каждого субъекта на основе статического испытания. Обратная кинематика и обратная динамика были выполнены для расчета углов и моментов в суставах.
Эти данные использовались для расчета мышечных сил, действующих на коленный сустав с течением времени, с использованием общей скелетно-мышечной модели всего тела для анализа данных движения в OpenSim 3.3 (Дельп и др., 2007). Плюснефаланговые и подтаранные суставы фиксировались в анатомически нейтральных положениях для всех анализов, как это недавно сделали другие авторы (O’Connor et al., 2018). Фильтр нижних частот четвертого порядка с нулевой задержкой и частотой среза 10 Гц применялся к силам реакции грунта, тогда как фильтр Вольтринга с MSE 10 применялся для сглаживания кинематических данных (Woltring, 1991). Входные данные для модели были созданы с использованием пользовательских подпрограмм MATLAB (2014b, The MathWorks, Inc., Натик, Массачусетс, США) на основе сценариев MATLAB для обработки данных из simtk.сайт орг. Модель была масштабирована в соответствии с размерами каждого субъекта на основе статического испытания. Обратная кинематика и обратная динамика были выполнены для расчета углов и моментов в суставах. Мышечные силы были рассчитаны с использованием статической оптимизации.
Мышечные силы были рассчитаны с использованием статической оптимизации.
После оттаивания в течение ночи кожа и мышцы девяти образцов трупного коленного сустава человека (возраст: 61,5 ± 5,5 лет, масса тела: 62,3 ± 7,2 кг, индекс массы тела: 21,2 ± 1,0, Science Care, Inc. Феникс, Аризона, США) ; Утверждение IRB №.300/12, Ульмский университет) были полностью удалены, а бедренная и большеберцовая кости были обнажены. Проксимальный отдел малоберцовой кости фиксировали к большеберцовой кости с помощью кортикального винта и резецировали на 2 см ниже головки малоберцовой кости. Бедренную и большеберцовую кости вырезали на расстоянии 12 см от коленного зазора и формовали в металлических горшках с использованием полиметилметакрилата (Technovit 4000, Kulzer GmbH, Wehrheim, Germany) (рис. 3C). Суставную капсулу осторожно вскрывали, обнажали надколенник и резецировали поднадколенниковую клетчатку. Коронарные мениски надрезались спереди и сзади для введения чувствительной к давлению фольги Tekscan (система I-Scan (тип 4000), Tekscan Inc. , Бостон, Массачусетс, США) на большеберцовом плато для измерения среднего и пикового тибиофеморального контактного давления. Датчик давления спереди и сзади крепился к большеберцовой кости с помощью винта, чтобы свести к минимуму движение датчика во время тестирования.
, Бостон, Массачусетс, США) на большеберцовом плато для измерения среднего и пикового тибиофеморального контактного давления. Датчик давления спереди и сзади крепился к большеберцовой кости с помощью винта, чтобы свести к минимуму движение датчика во время тестирования.
Рис. 3. (A) Моделирование мышечной силы четырехглавой мышцы с использованием стержня с резьбой, стального троса, компонента со стальными крючками и наконечником. (B) Моделирование мышечной силы подколенного сухожилия и икроножных мышц с использованием резьбовых стержней, дюбелей и стальных тросов. (C) Образец, зафиксированный в динамическом симуляторе коленного сустава с цилиндрическими металлическими горшками, одноосными тензодатчиками для измерения мышечных усилий, чувствительной к давлению фольгой для измерения тибиофеморального контактного давления и системами координат с оптическими маркерами для измерения кинематики.
Из-за больших мышечных усилий до 1000 Н, действующих на образцы коленного сустава, необходима жесткая фиксация стальных тросов в местах анатомических вставок. Поэтому для имитации передних мышц бедра просверливали отверстие в месте прикрепления сухожилия надколенника на бугристости большеберцовой кости, вставляли стержень с резьбой и закрепляли с помощью контргайки.Кроме того, в надколеннике просверливали два отверстия, к стержню с резьбой прикрепляли стальной трос, который проходил через эти два отверстия. Чтобы обеспечить направление надколенника во время движения, под надколенником внутри стальных тросов была установлена обойма (Carl Stahl Technocables GmbH, Süßen, Германия) (рис. 3А). Над надколенником был закреплен компонент с тремя стальными крючками с болтовым креплением, чтобы установить соединение между анатомическим местом введения и одноосными тензодатчиками и пневматическими приводами.Моделирование мышц подколенного сухожилия также выполнялось с использованием стержней с резьбой в местах анатомического прикрепления мышц (рис. 3В). M. biceps femoris прикрепляется к головке малоберцовой кости, M. semitendinosus прикрепляется к pes anserinus у медиального бугра большеберцовой кости, а полуперепончатые мышцы прикрепляются к медиальному мыщелку большеберцовой кости.
Поэтому для имитации передних мышц бедра просверливали отверстие в месте прикрепления сухожилия надколенника на бугристости большеберцовой кости, вставляли стержень с резьбой и закрепляли с помощью контргайки.Кроме того, в надколеннике просверливали два отверстия, к стержню с резьбой прикрепляли стальной трос, который проходил через эти два отверстия. Чтобы обеспечить направление надколенника во время движения, под надколенником внутри стальных тросов была установлена обойма (Carl Stahl Technocables GmbH, Süßen, Германия) (рис. 3А). Над надколенником был закреплен компонент с тремя стальными крючками с болтовым креплением, чтобы установить соединение между анатомическим местом введения и одноосными тензодатчиками и пневматическими приводами.Моделирование мышц подколенного сухожилия также выполнялось с использованием стержней с резьбой в местах анатомического прикрепления мышц (рис. 3В). M. biceps femoris прикрепляется к головке малоберцовой кости, M. semitendinosus прикрепляется к pes anserinus у медиального бугра большеберцовой кости, а полуперепончатые мышцы прикрепляются к медиальному мыщелку большеберцовой кости. Для моделирования икроножных мышц (M. gastrocnemius medialis, M. gastrocnemius lateralis) использовались штифты, которые прикреплялись в точках начала на медиальном и латеральном мыщелках бедра (рис. 3В).Все стальные тросы дополнительно направлялись самоустанавливающимися поворотными узлами для обеспечения наилучшей анатомической линии действия. На протяжении всего процесса подготовки и всех испытаний образцы коленного сустава увлажняли физиологическим раствором.
Для моделирования икроножных мышц (M. gastrocnemius medialis, M. gastrocnemius lateralis) использовались штифты, которые прикреплялись в точках начала на медиальном и латеральном мыщелках бедра (рис. 3В).Все стальные тросы дополнительно направлялись самоустанавливающимися поворотными узлами для обеспечения наилучшей анатомической линии действия. На протяжении всего процесса подготовки и всех испытаний образцы коленного сустава увлажняли физиологическим раствором.
После подготовки образцы коленного сустава фиксировали в вертикальном положении в симуляторе коленного сустава с помощью цилиндрических металлических горшков (рис. 3С). Кроме того, пневматические приводы были подключены к стальным тросам и одноосным датчикам силы (рис. 3C).На первом этапе и для предварительной подготовки образца коленного сустава был выполнен медленный присед без моделирования мышечной силы. Образец коленного сустава сгибали от 10° до 70° и разгибали назад до 10° со скоростью сгибания 5°/с. Это движение было повторено с моделированием мышечной силы в соответствии с целевыми мышечными силами, полученными в исследовании MAID..png) Наконец, мы смоделировали прыжковое приземление с имитацией мышечной силы, во время которого образец сгибался от 10° до 50° со скоростью ~180°/с и вытягивался назад от 50° до 10° со скоростью ~120°/с. с (см. Дополнительное видео).Ускорение и замедление бедра во время сгибания были установлены на 2,5 м/с 2 и во время разгибания на 1,5 м/с 2 . Приземление в прыжке, выполненное испытуемыми (исследование MAID), длилось 420 мс.
Наконец, мы смоделировали прыжковое приземление с имитацией мышечной силы, во время которого образец сгибался от 10° до 50° со скоростью ~180°/с и вытягивался назад от 50° до 10° со скоростью ~120°/с. с (см. Дополнительное видео).Ускорение и замедление бедра во время сгибания были установлены на 2,5 м/с 2 и во время разгибания на 1,5 м/с 2 . Приземление в прыжке, выполненное испытуемыми (исследование MAID), длилось 420 мс.
Перед началом симуляции приземления в прыжке для стабилизации коленного сустава применялась предварительная мышечная сила от 50 до 300 Н. Во время медленного приседания и приземления в прыжке непрерывно регистрировалось тибиофеморальное контактное давление (K-Scan™, Tekscan Inc.). Кинематику коленного сустава регистрировали с помощью системы 3D-камер на основе маркеров (Optitrack, NaturalPoint, Inc., Орегон, США). Во время приземления в прыжке дополнительно регистрировали силу реакции опоры и приложенные мышечные силы с частотой дискретизации 1 кГц с использованием специального программного обеспечения LabVIEW (National Instruments).
Статистический анализ
Коэффициент корреляции Браве-Пирсона (R) использовался для сравнения фактических и целевых значений (MAID) силы реакции опоры и прилагаемых мышечных сил во время приземления в прыжке. Значения множественных коэффициентов корреляции >0,5 показывают умеренную связь, а значения >0.8 показывают сильную линейную зависимость. Гауссово распределение тибиофеморального пика и данных о распределении среднего давления с использованием теста Шапиро-Уилка (Shapiro and Wilk, 1965) дает нормально распределенные данные. Таким образом, односторонний ANOVA с апостериорным LSD-тестом был выполнен для сравнения среднего и пикового тибиофеморального контактного давления между медленными приседаниями с имитацией мышечной силы и без нее и приземлением в прыжке с падением с имитацией мышечной силы боковых и медиальных мышц. купе соответственно.Различия медиального и латерального тибиофеморального контактного давления исследовали с помощью парного критерия Стьюдента t . Пакет статистического программного обеспечения (SPSS V24, IBM Corp., Армонк, США) использовали для проведения статистического анализа, при этом значение p <0,05 считалось значимым, и при необходимости применялась стандартная поправка Бонферрони.
Пакет статистического программного обеспечения (SPSS V24, IBM Corp., Армонк, США) использовали для проведения статистического анализа, при этом значение p <0,05 считалось значимым, и при необходимости применялась стандартная поправка Бонферрони.
Результаты
Мышечные силы
Все смоделированные средние фактические мышечные силы и целевые мышечные силы, полученные в исследовании MAID, представлены как функция цикла движения для движения приземления в прыжке (рис. 4).Целевая сила M.vastus lateralis увеличилась в течение 80 мс до максимального значения 1050 Н. Смоделированная мышечная сила была на ~ 15% ниже с задержкой ~ 60 мс, что привело к корреляции R = 0,72. Целевая сила M.vastus medialis увеличилась в течение 120 мс до 480 Н, тогда как смоделированная мышечная сила была примерно на 10% ниже с задержкой 60 мс (R = 0,85). Целевая сила средней широкой мышцы бедра и прямой мышцы бедра увеличилась до 580 Н в течение 100 мс. Моделирование этой группы мышц было примерно на 12% ниже с задержкой 40 мс (R = 0. 92). Целевые значения для мышц подколенного сухожилия (M. biceps femoris, M. semitendinosus/M. semimembranosus) и икроножных мышц (M. gastrocnemius medialis, M. gastrocnemius lateralis) составляли от 0 до 200 Н, что приводило к корреляции R = 0,48, R = 0,52, R = 0,71 и R = 0,68 соответственно.
92). Целевые значения для мышц подколенного сухожилия (M. biceps femoris, M. semitendinosus/M. semimembranosus) и икроножных мышц (M. gastrocnemius medialis, M. gastrocnemius lateralis) составляли от 0 до 200 Н, что приводило к корреляции R = 0,48, R = 0,52, R = 0,71 и R = 0,68 соответственно.
Рисунок 4 . Моделирование мышечной силы — сравнение фактической (средние значения) и целевой мышечной силы (полученной в исследовании MAID) в зависимости от цикла движения (длительность: 540 мс) во время приземления в прыжке для М.латеральная широкая мышца бедра, медиальная широкая мышца бедра, средняя широкая мышца бедра/М. rectus femoris, M. biceps femoris, M. semitendinosus/M. semimembranosus, M. gastrocnemius medialis и M. gastrocnemius lateralis ( n = 9).
Силы наземного реагирования
Что касается силы реакции опоры в вертикальном направлении при приземлении в прыжке, была определена сильная корреляция (R = 0,93) между средним фактическим значением и целевым значением (рис.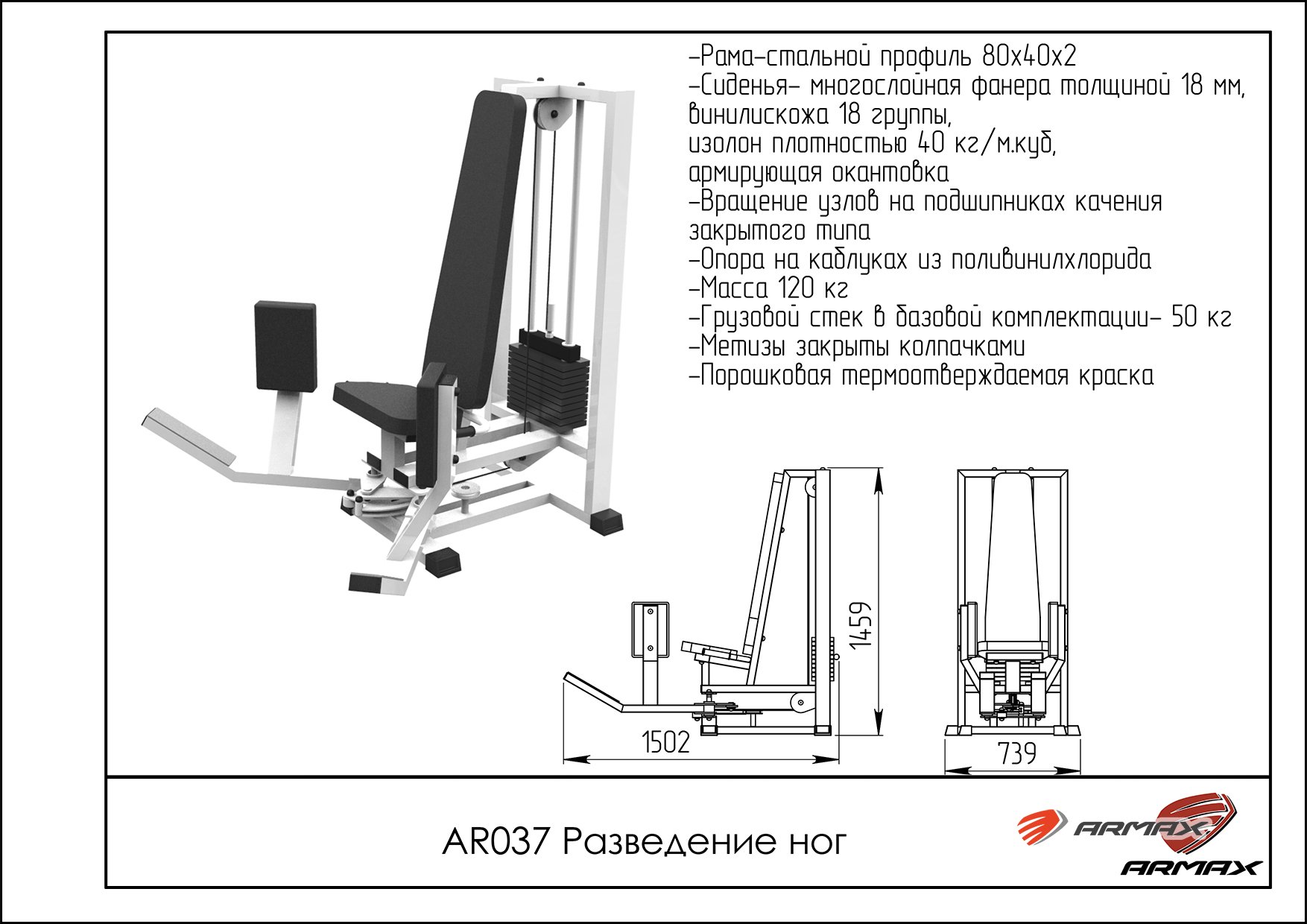 5). В начале движения вертикальная опорная сила достигала значений ~100 Н из-за ранее описанного смещения мышечных сил.В дальнейшем развивались усилия до 860 Н.
5). В начале движения вертикальная опорная сила достигала значений ~100 Н из-за ранее описанного смещения мышечных сил.В дальнейшем развивались усилия до 860 Н.
Рисунок 5 . Вертикальная сила реакции опоры — сравнение фактической (среднее значение, синяя линия) со стандартным отклонением (огибающая, голубые линии) и целевой силы реакции опоры (измеренной в ходе исследования MAID, зеленая линия) в зависимости от цикла движения (длительность : 540 мс) ( n = 9).
Контактное давление на колено
Данные о среднем и пиковом контактном давлении для медленного приседания без симуляции мышечной силы и с ней, а также для движения приземления в прыжке для медиального и латерального отделов колена представлены на рисунке 6 соответственно.Однофакторный дисперсионный анализ показал значительную разницу (90 585 p 90 586 < 0,001) для всех измерений среднего и пикового давления. Последующее тестирование LSD выявило значительное увеличение среднего и пикового контактного давления в медиальном и латеральном отделах между медленным приседанием без имитации мышечной силы и медленным приседанием с симуляцией мышечной силы ( p <0,04) и приземлением в прыжке. с моделированием мышечной силы ( p <0,001). Пиковые контактные давления не различались ( p > 0.187) при сравнении медленного приседания с имитацией мышечной силы и приземления в прыжке с имитацией мышечной силы. Расчеты среднего контактного давления показали значительно более высокие значения для приземления в прыжке ( p <0,001) по сравнению с медленным приседанием с имитацией мышечной силы. Сравнение медиального и латерального пика и среднего контактного давления не выявило различий ( p > 0,067) между отсеками.
с моделированием мышечной силы ( p <0,001). Пиковые контактные давления не различались ( p > 0.187) при сравнении медленного приседания с имитацией мышечной силы и приземления в прыжке с имитацией мышечной силы. Расчеты среднего контактного давления показали значительно более высокие значения для приземления в прыжке ( p <0,001) по сравнению с медленным приседанием с имитацией мышечной силы. Сравнение медиального и латерального пика и среднего контактного давления не выявило различий ( p > 0,067) между отсеками.
Рисунок 6 . Среднее и пиковое контактное давление (среднее ± SD) в медиальном и латеральном отделах для медленных приседаний без имитации мышечной силы, медленных приседаний с симуляцией мышечной силы и упражнения с приземлением в прыжке.* p ≤ 0,05 ( n = 9).
Кинематика
Во время медленных приседаний была определена наружная ротация большеберцовой кости между ~6° и 12° (рис. 7), отражающая типичный механизм завинчивания, возникающий между положением разгибания колена и положением сгибания на 30°.
7), отражающая типичный механизм завинчивания, возникающий между положением разгибания колена и положением сгибания на 30°.
Рисунок 7 . Пример внешнего вращения большеберцовой кости в зависимости от угла сгибания колена во время медленного приседания с имитацией мышечной силы.
Обсуждение
В рамках настоящего исследования был разработан новый симулятор коленного сустава, который сравнивался с данными субъектов in vivo по силе реакции опоры и мышечным усилиям.Можно было показать, что этот тренажер способен выполнять быстрые движения со скоростью 145°/с в сочетании с моделированием физиологической мышечной силы на образцах коленного сустава, что привело к реалистичным силам реакции опоры. Таким образом, насколько нам известно, этот тренажер коленного сустава является первым, способным имитировать прыжковые приземления с физиологическими нагрузками на суставы и кинематикой.
Проверка концепции тренажера коленного сустава проводилась путем исследования силы реакции опоры в вертикальном направлении и контактного давления большеберцово-бедренного сустава. Кроме того, была проанализирована кинематика колена, чтобы гарантировать свободное движение.
Кроме того, была проанализирована кинематика колена, чтобы гарантировать свободное движение.
Важным показателем нагрузки на конечность является сила реакции опоры (Zadpoor and Nikooyan, 2011). В настоящем исследовании можно было показать, что при моделировании прыжкового приземления для этой когорты с R = 0,93 может быть создана почти физиологическая сила реакции опоры в вертикальном направлении. Эта физиологическая сила реакции опоры во время приземления в прыжке может быть достигнута, несмотря на то, что мышечные силы частично не моделируются идеально.В частности, моделирование мышечной силы четырехглавых мышц-разгибателей (латеральная мышца широкой мышцы бедра, медиальная мышца широкой мышцы бедра, промежуточная мышца широкой мышцы бедра/прямая мышца бедра) показало хорошую корреляцию (R = 0,72–0,92) между мышечными силами, полученными из Исследование MAID и смоделированные мышечные силы. В свою очередь, из-за инерции пневматических приводов было сложнее добиться имитации подколенного сухожилия и икроножных мышц.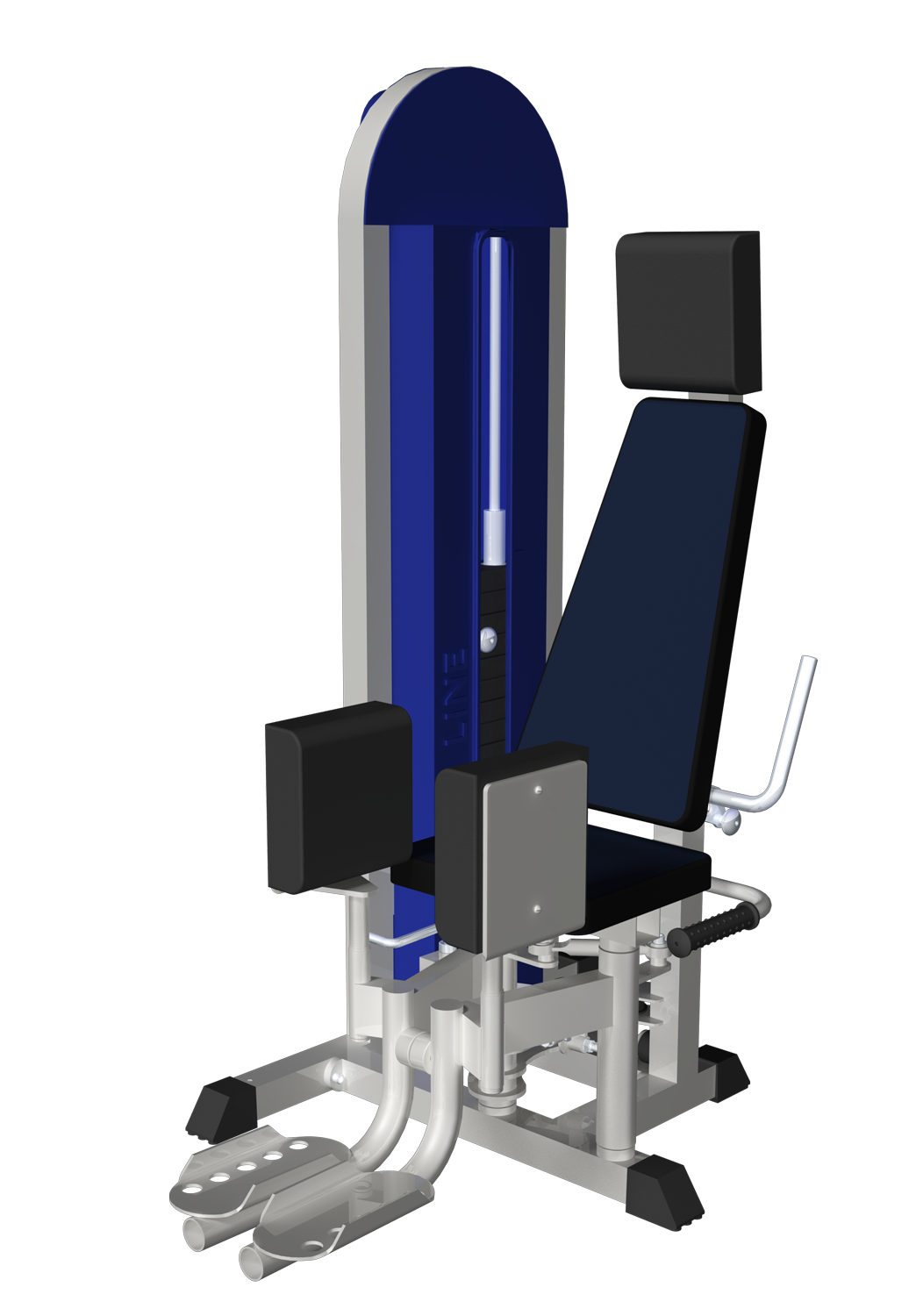 Тем не менее, коэффициенты Браве-Пирсона для этих симуляций мышечной силы по-прежнему показали приемлемый коэффициент в диапазоне между R = 0.48–0,71. Кроме того, мы считаем, что это существенно не повлияло на результирующую силу в коленном суставе. Эти мышечные силы действуют на гораздо более низком уровне силы, чем, например, мышцы-разгибатели (рис. 4), и поэтому вносят меньший вклад в стабилизацию коленного сустава во время прыжкового приземления, чем мышцы-разгибатели (Baratta et al., 1988; Урабе и др., 2005). Тем не менее, чтобы улучшить моделирование сил мышц-сгибателей в будущих исследованиях, необходимо внести усовершенствования в систему контроля давления воздуха.
Тем не менее, коэффициенты Браве-Пирсона для этих симуляций мышечной силы по-прежнему показали приемлемый коэффициент в диапазоне между R = 0.48–0,71. Кроме того, мы считаем, что это существенно не повлияло на результирующую силу в коленном суставе. Эти мышечные силы действуют на гораздо более низком уровне силы, чем, например, мышцы-разгибатели (рис. 4), и поэтому вносят меньший вклад в стабилизацию коленного сустава во время прыжкового приземления, чем мышцы-разгибатели (Baratta et al., 1988; Урабе и др., 2005). Тем не менее, чтобы улучшить моделирование сил мышц-сгибателей в будущих исследованиях, необходимо внести усовершенствования в систему контроля давления воздуха.
Что касается тибиофеморального контактного давления, исследования уже показали, что контактное давление в коленном суставе значительно увеличивалось при увеличении осевой нагрузки даже при статическом положении колена (Poh et al., 2012; Geeslin et al., 2016). Зейтц и др. и Перес-Бланка и др. определили пиковое контактное давление ~3 МПа при приложении осевой нагрузки 1000 Н (Seitz et al. , 2012; Perez-Blanca et al., 2016). Ли и др. определили пиковое контактное давление 4,2 МПа в медиальном отделе при осевой нагрузке 1800 Н при угле сгибания колена 60° (Lee et al., 2006). Это пиковое значение немного ниже, но на том же уровне, что и давление, определенное в настоящем исследовании. Таким образом, можно сделать вывод, что осевая нагрузка, создаваемая мышечными силами при приземлении в прыжке, соответствует осевой нагрузке ≥1800 Н. Далее можно показать, что на основании измерений тибиофеморального контакта физиологическая передача нагрузки была достигнута только в случай моделирования мышечной силы, указывающий на передаточное отношение медиального и латерального отделов ~ 60: 40 (Bruns et al., 1993). В свою очередь, без моделирования мышечной силы распределение медиолатеральной нагрузки было случайным. Сравнение квазистатического приседания без имитации мышечной силы с имитацией приседания с имитацией мышечной силы и прыжком с падением привело к значительному увеличению среднего тибиофеморального и пикового контактного давления. Это подчеркивает важность обеспечения физиологических совместных усилий во время экспериментов in vitro.
Это подчеркивает важность обеспечения физиологических совместных усилий во время экспериментов in vitro.
Анализ кинематики коленного сустава показал внешнее вращение большеберцовой кости во время имитации медленного приседания на ~6°-12°, начиная с 25° сгибания в настоящем исследовании.Этот типичный винтовой механизм является непроизвольным пассивным движением, стабилизирующим коленный сустав при разгибании, и вызван асимметрией между мыщелками бедра и плато большеберцовой кости (Piazza and Cavanagh, 2000). Согласно литературным данным, винтовой механизм начинается между 25° и 36° сгибания колена и обычно составляет от ~5° до 12° наружной ротации (Bull et al., 2008; Müller et al., 2009; Sharma et al. ., 2012; Хакер и др., 2016). Наши измерения согласуются с этими выводами, доказывая свободное движение суставных образцов.
Ограничением представленного здесь симулятора коленного сустава является наблюдаемая задержка в 120 мс (28%) при сравнении имитации прыжкового приземления (540 мс) и данных, полученных в ходе тематического исследования MAID (420 мс). Мы предполагаем, что пневматические приводы не могли перенастроиться достаточно быстро из-за внутреннего контура регулирования давления и инерции пневматических приводов. Тем не менее, со скоростью, используемой для сгибания и разгибания, можно было добиться имитации прыжкового приземления почти в реальном времени.Другое ограничение заключается в том, что в исследовании MAID использовался набор маркеров Plugin Gait без сложного набора маркеров стопы. Поскольку в захвате движения на основе маркеров недостаточно разрешения, чтобы получить точность, необходимую для отслеживания плюснефаланговых и подтаранных суставов, особенно с несколькими маркерами на стопе, блокировка этих степеней свободы вполне разумна.
Мы предполагаем, что пневматические приводы не могли перенастроиться достаточно быстро из-за внутреннего контура регулирования давления и инерции пневматических приводов. Тем не менее, со скоростью, используемой для сгибания и разгибания, можно было добиться имитации прыжкового приземления почти в реальном времени.Другое ограничение заключается в том, что в исследовании MAID использовался набор маркеров Plugin Gait без сложного набора маркеров стопы. Поскольку в захвате движения на основе маркеров недостаточно разрешения, чтобы получить точность, необходимую для отслеживания плюснефаланговых и подтаранных суставов, особенно с несколькими маркерами на стопе, блокировка этих степеней свободы вполне разумна.
В заключение, представленное здесь устройство можно, в частности, использовать для имитации динамических упражнений с быстрыми движениями в сочетании с физиологическими мышечными усилиями, возникающими в повседневной жизни.Например, на сегодняшний день доступны только данные о менисковых нагрузках и их приложениях из статических или квазистатических испытаний и условий нагружения. В дальнейшем можно будет исследовать нагрузки на мениски и их прикрепления в условиях физиологических движений и мышечных сил. Другие структуры, в том числе крестообразные и боковые связки и хрящи, также могут быть исследованы в таких условиях. Симулятор коленного сустава может быть расширен для включения дополнительных моделей движений в будущем.Следовательно, можно было бы исследовать возникающие вопросы, особенно в области травм коленного сустава и оптимизации реабилитации.
В дальнейшем можно будет исследовать нагрузки на мениски и их прикрепления в условиях физиологических движений и мышечных сил. Другие структуры, в том числе крестообразные и боковые связки и хрящи, также могут быть исследованы в таких условиях. Симулятор коленного сустава может быть расширен для включения дополнительных моделей движений в будущем.Следовательно, можно было бы исследовать возникающие вопросы, особенно в области травм коленного сустава и оптимизации реабилитации.
Заявление о доступности данных
Наборы данных, созданные для этого исследования, доступны по запросу соответствующему автору.
Заявление об этике
Исследования с участием людей были рассмотрены и одобрены Ethikkommission Universität Ulm и Ethikkommission Universität Heidelberg. Пациенты/участники предоставили письменное информированное согласие на участие в этом исследовании.
Вклад авторов
FS разработал тренажер коленного сустава. SD и SW выполнили анализ движения и исследование обратной динамики. FS и SH провели и оценили проверку концепции. FS и AS провели статистический анализ. Ф.С., А.С. и Л.Д. составили статью и создали рисунки. AS, AI и LD участвовали в процессе редактирования статьи и дали окончательное одобрение представленной версии.
FS и SH провели и оценили проверку концепции. FS и AS провели статистический анализ. Ф.С., А.С. и Л.Д. составили статью и создали рисунки. AS, AI и LD участвовали в процессе редактирования статьи и дали окончательное одобрение представленной версии.
Финансирование
Эта работа финансировалась Немецким исследовательским фондом (DFG DU254/8-1).Финансирование публикации в открытом доступе обеспечивает Немецкое общество биомеханики.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/fbioe.2019.00244/full#supplementary-material
. Дополнительное видео. Видео тренажера, выполняющего упражнение по приземлению с прыжком.
Каталожные номера
Ахмад, К.С., Квак, С.Д., Атешян, Г.А., Уорден, У.Х., Стедман, Дж.Р., и Моу, В.К. (1998). Влияние адгезии сухожилия надколенника к передней большеберцовой кости на механику коленного сустава. утра. Дж. Спорт Мед. 26, 715–724. дои: 10.1177/03635465980260051901
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Бах, Дж. М., и Халл, М. Л. (1995). Новая система приложения нагрузки для in vitro исследования травм связок коленного сустава человека. Дж. Биомех. Eng-T Asme 117, 373–382. дои: 10.1115/1.2794195
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Баратта, Р., Соломонов, М., Чжоу, Б.Х., Летсон, Д., Чуинард, Р., и Д’Амброзиа, Р. (1988). Мышечная коактивация. Роль мышц-антагонистов в поддержании стабильности коленного сустава. утра. Дж. Спорт Мед. 16, 113–122. дои: 10.1177/036354658801600205
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Борн, Р. , Гудфеллоу, Дж., и О’Коннор, Дж. (1978). Функциональный анализ различных эндопротезирований коленного сустава. Пер. Ортоп. Рез. Соц . 24:160.
, Гудфеллоу, Дж., и О’Коннор, Дж. (1978). Функциональный анализ различных эндопротезирований коленного сустава. Пер. Ортоп. Рез. Соц . 24:160.
Академия Google
Брунс, Дж., Фолькмер, М., и Люссенхоп, С. (1993). Распределение давления в коленном суставе — влияние варусной и вальгусной девиаций без и с расслоением связок. Арх. Ортоп. травма хирург. 113, 12–19. дои: 10.1007/BF00440588
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Булл, А.М., Кесслер О., Алам М. и Эмис А.А. (2008). Изменения кинематики коленного сустава отражают геометрию сустава после эндопротезирования. клин. Ортоп. Относ. Рез. 466, 2491–2499. doi: 10.1007/s11999-008-0440-z
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Черчилль, Д.Л., Инкаво, С.Дж., Джонсон, К.С., и Бейннон, Б.Д. (1998). Трансэпикондилярная ось приближается к оси оптимального сгибания колена. клин. Ортоп. Относ. Рез. 111–118. дои: 10.1097/00003086-199811000-00016
дои: 10.1097/00003086-199811000-00016
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Делп, С.Л., Андерсон, Ф.К., Арнольд, А.С., Лоан, П., Хабиб, А., Джон, К.Т., и соавт. (2007). OpenSim: программное обеспечение с открытым исходным кодом для создания и анализа динамических симуляций движения. IEEE Trans. Биомед. англ. 54, 1940–1950. doi: 10.1109/TBME.2007.
- 4
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Дирманн, Н., Шумахер, Т., Шанц, С., Рашке, М.Дж., Петерсен, В., и Зантоп, Т. (2009). Вращательная нестабильность коленного сустава: внутренняя ротация большеберцовой кости при тесте с имитацией смещения оси вращения. Арх. Ортоп. Травма. Сур . 129, 353–358. doi: 10.1007/s00402-008-0681-z
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Дюрселен, Л., Клаас, Л., и Кифер, Х. (1995). Влияние мышечных усилий и внешних нагрузок на растяжение крестообразной связки. утра. Дж. Спорт Мед. 23, 129–136. дои: 10.1177/036354659502300122
утра. Дж. Спорт Мед. 23, 129–136. дои: 10.1177/036354659502300122
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Элиас, Дж. Дж., Кумагаи, М., Митчелл, И., Мидзуно, Ю., Маттессич, С. М., Уэбб, Дж. Д., и соавт. (2002). In vitro кинематические схемы аналогичны для фиксированной платформы и подвижного несущего протеза. J. Артропластика 17, 467–474. doi: 10.1054/арт.2002.31082
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Гислин, А. Г., Чивитарез, Д., Тернбулл, Т.Л., Дорнан, Г.Дж., Фузо, Ф.А., и ЛаПрад, Р.Ф. (2016). Влияние отрыва заднего корешка латерального мениска и мениско-бедренных связок на механику тибиофеморального контакта. Хирургия коленного сустава. Спортивный травматол. Артроск. 24, 1469–1477. doi: 10.1007/s00167-015-3742-1
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Гилл, Т.Дж., ДеФрейт, Л.Е., Ван, К., Кэри, К.Т., Зайонц, С. , Заринс, Б., и соавт. (2003). Биомеханическое влияние реконструкции задней крестообразной связки на функцию коленного сустава.Кинематическая реакция на смоделированные мышечные нагрузки. утра. Дж. Спорт Мед. 31, 530–536. дои: 10.1177/03635465030310040901
, Заринс, Б., и соавт. (2003). Биомеханическое влияние реконструкции задней крестообразной связки на функцию коленного сустава.Кинематическая реакция на смоделированные мышечные нагрузки. утра. Дж. Спорт Мед. 31, 530–536. дои: 10.1177/03635465030310040901
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Голдсмит, М.Т., Янссон, К.С., Смит, С.Д., Энгебрецен, Л., ЛаПрад, Р.Ф., и Вийдикс, К.А. (2013). Биомеханическое сравнение анатомических реконструкций передней крестообразной связки с одним и двумя пучками: исследование in vitro . утра. Дж. Спорт Мед. 41, 1595–1604.дои: 10.1177/0363546513487065
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Хакер С.П., Игнатиус А. и Дюрселен Л. (2016). Влияние тестовой установки на кинематику коленного сустава — метаанализ ротации большеберцовой кости. Дж. Биомех. 49, 2982–2988. doi: 10.1016/j.jbiomech.2016.07.025
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Хайнрихс, С. Х., Книрцингер, Д., Стофферин, Х., и Шмольц, В. (2017).Валидация нового биомеханического испытательного стенда для коленного сустава с шестью степенями свободы. Биомед. Eng . 63, 709–717. doi: 10.1515/bmt-2016-0255
Х., Книрцингер, Д., Стофферин, Х., и Шмольц, В. (2017).Валидация нового биомеханического испытательного стенда для коленного сустава с шестью степенями свободы. Биомед. Eng . 63, 709–717. doi: 10.1515/bmt-2016-0255
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Хирокава С., Соломонов М., Луо З., Лу Ю. и Д’Амброзия Р. (1991). Мышечное совместное сокращение и контроль стабильности колена. Ж. Электромиогр. Кинезиол. 1, 199–208. дои: 10.1016/1050-6411(91)-4
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Хофер, Дж.К., Геджо Р., МакГарри М. Х. и Ли Т. К. (2011). Влияние стояния на коленях на тибиофеморальную биомеханику. клин. Биомех. 26, 605–611. doi: 10.1016/j.clinbiomech.2011.01.016
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Киапур, А.М., Деметропулос, С.К., Киапур, А., Кватман, К.Е., Вордеман, С.К., Гоэль, В.К., и соавт. (2016). Деформационная реакция передней крестообразной связки на одноплоскостные и многоплоскостные нагрузки во время имитации приземления: влияние на механизм повреждения. утра. Дж. Спорт Мед. 44, 2087–2096. дои: 10.1177/0363546516640499
Деформационная реакция передней крестообразной связки на одноплоскостные и многоплоскостные нагрузки во время имитации приземления: влияние на механизм повреждения. утра. Дж. Спорт Мед. 44, 2087–2096. дои: 10.1177/0363546516640499
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Кигути К., Фукуда Т., Кога Ю., Ватанабэ Т., Терадзима К., Хаяши Т. и др. (1999). Разработка физиологического тренажера движений колена. АДВ Робототехника 13, 171–188. дои: 10.1163/156855399X01071
Полнотекстовая перекрестная ссылка | Академия Google
Кумагаи М., Мидзуно Ю., Маттессич С. М., Элиас Дж. Дж., Cosgarea, A.J., и Chao, E.Y. (2002). Разрыв задней крестообразной связки изменяет in vitro кинематику коленного сустава. клин. Ортоп. Относ. Рез. 395, 241–248. дои: 10.1097/00003086-200202000-00029
Полнотекстовая перекрестная ссылка | Академия Google
Lee, S.J., Aadalen, K.J., Malaviya, P., Lorenz, E. P., Hayden, J.K., Farr, J., et al. (2006). Механика тибиофеморального контакта после серийной медиальной менискэктомии трупного коленного сустава человека. утра. Дж. Спорт Мед. 34, 1334–1344. дои: 10.1177/0363546506286786
P., Hayden, J.K., Farr, J., et al. (2006). Механика тибиофеморального контакта после серийной медиальной менискэктомии трупного коленного сустава человека. утра. Дж. Спорт Мед. 34, 1334–1344. дои: 10.1177/0363546506286786
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Ли Г., Гилл Т. Дж., ДеФрейт Л. Э., Зайонц С., Глатт В. и Заринс Б. (2002). Биомеханические последствия дефицита PCL в колене при симулированных мышечных нагрузках — экспериментальное исследование in vitro . Дж. Ортоп. Рез. 20, 887–892. doi: 10.1016/S0736-0266(01)00184-X
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Ли, Г., Rudy, T.W., Sakane, M., Kanamori, A., Ma, C.B., and Woo, S.L.Y. (1999). Важность нагрузки на четырехглавую мышцу и подколенное сухожилие для кинематики коленного сустава, обеспечивающего силы на месте в передней крестообразной сцепке. Дж. Биомех. 32, 395–400. doi: 10.1016/S0021-9290(98)00181-X
Полнотекстовая перекрестная ссылка | Академия Google
Livesay, G. A., Rudy, T.W., Woo, S.L., Runco, T.J., Sakane, M., Li, G., et al. (1997). Оценка влияния суставных ограничений на распределение силы in situ в передней крестообразной связке. Дж. Ортоп. Рез. 15, 278–284. doi: 10.1002/jor.1100150218
A., Rudy, T.W., Woo, S.L., Runco, T.J., Sakane, M., Li, G., et al. (1997). Оценка влияния суставных ограничений на распределение силы in situ в передней крестообразной связке. Дж. Ортоп. Рез. 15, 278–284. doi: 10.1002/jor.1100150218
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Ло, Дж., Мюллер, О., Вюншель, М., Бауэр, С., и Вюлькер, Н. (2008). Силы в передней крестообразной связке при моделировании сгибания с нагрузкой при передней и внутренней ротационной большеберцовой нагрузке. Дж. Биомех. 41, 1855–1861 гг. doi: 10.1016/j.jbiomech.2008.04.010
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Лоренц, А., Rothstock, S., Bobrowitsch, E., Beck, A., Gruhler, G., Ipach, I., et al. (2013). Характеристика поверхности хряща по рассеиваемой энергии трения во время сгибания колена с осевой нагрузкой — модель овцы in vitro. Дж. Биомех. 46, 1427–1432. doi: 10.1016/j.jbiomech.2013. 03.009
03.009
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Мюллер, О., Ло, Дж., Вюншель, М., Облох, К., и Вюлькер, Н. (2009). Моделирование движения колена под нагрузкой на недавно разработанном симуляторе колена in vitro . Биомедицинская техника 54, 142–149. doi: 10.1515/BMT.2009.015
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
O’Connor, J.D., Rutherford, M., Bennett, D., Hill, J.C., Beverland, D.E., Dunne, N.J., et al. (2018). Длительная нагрузка на тазобедренный сустав у пациентов с односторонним тотальным эндопротезированием тазобедренного сустава не отличается между конечностями или по сравнению со здоровым контролем при одинаковой скорости ходьбы. Дж. Биомех. 80, 8–15. doi: 10.1016/j.jbiomech.2018.07.033
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Омори, Г., Koga, Y., Bechtold, J.E., Gustilo, R.B., Nakabe, N., Sasagawa, K., et al. (1997). Контактное давление и трехмерное отслеживание неповерхностной надколенника при тотальном эндопротезировании коленного сустава. Колено 4, 15–21. doi: 10.1016/S0968-0160(96)00230-X
(1997). Контактное давление и трехмерное отслеживание неповерхностной надколенника при тотальном эндопротезировании коленного сустава. Колено 4, 15–21. doi: 10.1016/S0968-0160(96)00230-X
Полнотекстовая перекрестная ссылка | Академия Google
Перес-Бланка, А., Эспехо-Баэна, А., Амат Трухильо, Д., Прадо Новоа, М., Эспехо-Рейна, А., Кинтеро Лопес, К., и др. (2016). Сравнительное биомеханическое исследование контактных изменений после отрыва заднего корешка латерального мениска, чрескостной повторной установки и тотальной менискэктомии. Артроскопия 32, 624–633. doi: 10.1016/j.arthro.2015.08.040
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Пьяцца, С.Дж., и Кавана, П.Р. (2000). Измерение винтового движения колена чувствительно к ошибкам выравнивания оси. Дж. Биомех. 33, 1029–1034. doi: 10.1016/S0021-9290(00)00056-7
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
По, С. Ю., Ю, К.С., Вонг, П.Л., Кох, С.Б., Chia, S.L., Fook-Chong, S., et al. (2012). Роль передней межменисковой связки в механике тибиофеморального контакта при осевой нагрузке на сустав. Колено 19, 135–139. doi: 10.1016/j.knee.2010.12.008
Ю., Ю, К.С., Вонг, П.Л., Кох, С.Б., Chia, S.L., Fook-Chong, S., et al. (2012). Роль передней межменисковой связки в механике тибиофеморального контакта при осевой нагрузке на сустав. Колено 19, 135–139. doi: 10.1016/j.knee.2010.12.008
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Rudy, T.W., Livesay, G.A., Woo, S.L., and Fu, F.H. (1996). Комбинированный роботизированный/универсальный датчик силы для определения силы связок колена in situ. Дж. Биомех. 29, 1357–1360.дои: 10.1016/0021-9290(96)00056-5
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Зейтц, А. М., Любомирски, А., Фримерт, Б., Игнатиус, А., и Дюрселен, Л. (2012). Влияние частичной менискэктомии в медиальном заднем роге на механику большеберцово-бедренного контакта и деформации кольца мениска в коленях человека. Дж. Ортоп. Рез. 30, 934–942. doi: 10.1002/jor.22010
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Шапиро, С. С. и Уилк, М. Б. (1965). Дисперсионный анализ теста на нормальность (полные выборки). Биометрика 52, 591–611. doi: 10.1093/биомет/52.3-4.591
С. и Уилк, М. Б. (1965). Дисперсионный анализ теста на нормальность (полные выборки). Биометрика 52, 591–611. doi: 10.1093/биомет/52.3-4.591
Полнотекстовая перекрестная ссылка | Академия Google
Sharma, G.B., Saevarsson, S.K., Amiri, S., Montgomery, S., Ramm, H., Lichti, D.D., et al. (2012). Рентгенологический метод измерения пателлофеморального трекинга и большеберцово-бедренной кинематики до и после тотального эндопротезирования коленного сустава. Рез. сустава кости. 1, 263–271. дои: 10.1302/2046-3758.110.2000117
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Шумейкер, С.К., Адамс, Д., Дэниел, Д.М., и Ву, С.Л. (1993). Взаимодействие трансплантата передней крестообразной связки четырехглавой мышцы — исследование in vitro кинематики сустава и натяжения трансплантата передней крестообразной связки. клин. Ортоп. Относ. Рез. 294, 379–390. дои: 10.1097/00003086-199309000-00054
Полнотекстовая перекрестная ссылка | Академия Google
Штукенборг-Колсман, К. , Остермайер, С., Hurschler, C., и Wirth, C.J. (2002a). Большеберцово-бедренный контактный стресс после тотального эндопротезирования коленного сустава: сравнение конструкций вкладок с фиксированной и подвижной опорой. Акта Ортоп. Сканд. 73, 638–646. дои: 10.3109/17453670209178028
, Остермайер, С., Hurschler, C., и Wirth, C.J. (2002a). Большеберцово-бедренный контактный стресс после тотального эндопротезирования коленного сустава: сравнение конструкций вкладок с фиксированной и подвижной опорой. Акта Ортоп. Сканд. 73, 638–646. дои: 10.3109/17453670209178028
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Стукенборг-Колсман, К., Остермайер, С., Венгер, К. Х., и Вирт, К. Дж. (2002b). Относительное движение вкладыша подвижной опоры после тотального эндопротезирования коленного сустава — динамическое исследование in vitro . клин. Биомех. 17, 49–55. doi: 10.1016/S0268-0033(01)00103-6
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Torzilli, P.A., Deng, X.H., и Warren, RF (1994). Влияние сжимающей нагрузки на сустав и силы четырехглавой мышцы бедра на движение коленного сустава в интактном коленном суставе и коленном суставе с перерезанной передней крестообразной связкой. утра. Дж. Спорт Мед. 22, 105–112. дои: 10.1177/036354659402200117
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Урабе Ю., Кобаяши Р., Сумида С., Танака К., Йошида Н., Нишиваки Г.А. и соавт. (2005). Электромиографический анализ коленного сустава при приземлении в прыжке у спортсменов мужского и женского пола. Колено 12, 129–134. doi: 10.1016/j.knee.2004.05.002
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Виктор, Дж., Вонг, П., Витвроу, Э., Слотен, Дж. В., и Беллеманс, Дж. (2009). Насколько изометричны медиальная пателлофеморальная, поверхностная медиальная коллатеральная и латеральная коллатеральная связки колена? утра.Дж. Спорт Мед. 37, 2028–2036 гг. дои: 10.1177/0363546509337407
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Уитроу, Т.Дж., Хьюстон, Л.Дж., Войтис, Э.М., и Эштон-Миллер, Дж.А. (2006). Влияние импульсивного вальгусного момента коленного сустава на 90 585 in vitro 90 586 относительную деформацию передней крестообразной связки во время имитации приземления в прыжке. клин. Биомех. 21, 977–983. doi: 10.1016/j.clinbiomech.2006.05.001
клин. Биомех. 21, 977–983. doi: 10.1016/j.clinbiomech.2006.05.001
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Уолтринг, Х.Дж. (1991). Представление и расчет трехмерного движения суставов. Гул. Мов. науч. 10, 603–616. дои: 10.1016/0167-9457(91)
-3
Полнотекстовая перекрестная ссылка | Академия Google
Задпур А.А. и Никоян А.А. (2011). Взаимосвязь между стрессовыми переломами нижних конечностей и силой реакции опоры: систематический обзор. клин. Биомех. 26, 23–28. doi: 10.1016/j.clinbiomech.2010.08.005
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
границ | Робот Oncilla: универсальный четвероногий исследовательский робот с открытым исходным кодом и совместимыми ногами пантографа
1.Введение
Новые технологии позволяют улучшить наше понимание передвижений ногами и лежащих в их основе принципов. Мы утверждаем, что специально разработанные, биоинспирированные машины с ногами, такие как представленный робот Oncilla, могут дать ценную информацию о биомеханике и нервно-мышечном контроле передвижения животных на ногах. Мы показываем первоначальные примеры движения робота в симуляции и аппаратном обеспечении с минимальным усилием управления.
Мы показываем первоначальные примеры движения робота в симуляции и аппаратном обеспечении с минимальным усилием управления.
Технический прогресс формирует исследования, например, традиционные инструменты для вскрытия расширяются за счет компьютерной визуализации.3D-сканирование предоставляет пространственные данные о морфологии животного даже в движении (Walker et al., 2014). Усовершенствованное компьютерное моделирование дает представление о сложных взаимодействиях между мышцами, сухожилиями и структурами скелета во время передвижения (Delp et al., 2007). Это позволяет оценить движения, силы и взаимодействия скрытых и недоступных структур у животных. Цель состоит в том, чтобы с помощью новых технологий найти необходимые и достаточные компоненты биомеханического и нервно-мышечного контроля для передвижения ног путем определения формы и функции.
Однако сопоставление морфологий с функциями не является тривиальным. Побочные продукты эволюции, такие как перемычки, могут маскировать функции структур (Gould and Lewontin, 1979). Ножной аппарат животного, разработанный для передвижения, — сложная задача с гибридной динамикой. Балансировка, переноска и ускорение тела животного требует точной координации движений за счет обратной связи и перенаправления нагрузок. Силы и движения в значительной степени различаются в фазах замаха и опоры, разделенных резкими ударами при приземлении и высокими скоростями во время отрыва пальцев ног (Söhnela et al., 2017).
Ножной аппарат животного, разработанный для передвижения, — сложная задача с гибридной динамикой. Балансировка, переноска и ускорение тела животного требует точной координации движений за счет обратной связи и перенаправления нагрузок. Силы и движения в значительной степени различаются в фазах замаха и опоры, разделенных резкими ударами при приземлении и высокими скоростями во время отрыва пальцев ног (Söhnela et al., 2017).
Наш подход включает изготовленное на заказ биотехнологическое оборудование для роботов с ногами и его контроллер передвижения. Робот Oncilla позволяет нам заняться исследованием передвижения с новой точки зрения и напрямую оценить функциональную морфологию. С роботизированными установками у нас есть свобода реализовывать и тестировать упрощенные «чертежи», имитирующие аспекты биомеханики и нервно-мышечного контроля животных. Под такими «чертежами» мы понимаем планы построения, которые передаются из биологии в робототехнику с целью их проверки и характеристики. Конфигурация пантографической ноги, описанная Witte et al. (2003) является примером механического чертежа, заимствованного из биомеханики животных. Он основан на наблюдении преимущественно параллельной ориентации дистальных и проксимальных сегментов конечностей у трехчлениковых ног млекопитающих во время передвижения. Математические модели активации спинного мозга, например, у миног, так называемые «центральные генераторы паттернов», являются примером плана нервно-мышечного контроля. Они были выдвинуты гипотезой и наблюдались на животных, а также проверены и реализованы на роботах (Ijspeert et al., 2007).
Конфигурация пантографической ноги, описанная Witte et al. (2003) является примером механического чертежа, заимствованного из биомеханики животных. Он основан на наблюдении преимущественно параллельной ориентации дистальных и проксимальных сегментов конечностей у трехчлениковых ног млекопитающих во время передвижения. Математические модели активации спинного мозга, например, у миног, так называемые «центральные генераторы паттернов», являются примером плана нервно-мышечного контроля. Они были выдвинуты гипотезой и наблюдались на животных, а также проверены и реализованы на роботах (Ijspeert et al., 2007).
Реализация роботов может быть быстро изменена, т. е. для проверки эффектов масштабирования, в то время как лонгитюдные исследования на животных требуют значительно больше времени. Тестирование функций аппаратного обеспечения робота позволяет количественно оценить функцию; состояния компонентов (положение, скорость и т. д.), силы, связывающие компоненты, и внутренние нагрузки могут быть измерены с помощью специальных датчиков. Сигналы для управления движением и восприятия наблюдаемы и в основном контролируются. Напротив, регистрация движений и смещений глубоких тканей, а также их взаимодействующих сил у животных часто невозможна.В настоящее время регистрация нервных сигналов животных ограничена более простыми установками (Daley et al., 2009).
Сигналы для управления движением и восприятия наблюдаемы и в основном контролируются. Напротив, регистрация движений и смещений глубоких тканей, а также их взаимодействующих сил у животных часто невозможна.В настоящее время регистрация нервных сигналов животных ограничена более простыми установками (Daley et al., 2009).
Компьютерные модели животных и роботов с ногами принудительно вводят упрощения по сравнению с физикой реального мира. Некоторые аспекты физики особенно трудно точно и эффективно смоделировать: удары ногой о землю, качающиеся массы, демпфирование, податливость и трение (Schmitt and Günther, 2011). Трудно правильно смоделировать ходьбу животного или робота на ногах по мягкому субстрату (Li et al., 2009; Фолкингем и Гейтси, 2014 г.). Для сравнения, роботизированное оборудование может быть реалистичной физической (в отличие от числовой) моделью животного — ноги и ступни физически взаимодействуют с субстратами для передвижения посредством контактных сил. Тем не менее, компьютерные модели чрезвычайно информативны, в том числе потому, что их относительно легко вывести и применить. Здесь мы создали смоделированную компьютером модель робота Oncilla для быстрого тестирования параметров контроллера и создания данных о передвижении.
Здесь мы создали смоделированную компьютером модель робота Oncilla для быстрого тестирования параметров контроллера и создания данных о передвижении.
Будущий итеративный роботизированный подход к исследованиям на ногах может состоять из четырех этапов: (а) реализация чертежей механики и управления ногами животных в системе с ногами, (б) создание сценариев перемещения с помощью роботов на ногах, (в) сбор и анализ данных о передвижении и, в конечном итоге, (d) внесение изменений в первоначальные чертежи.В случае успеха улучшенные чертежи уменьшат несоответствие между характеристиками передвижения робота и животного. Изменения и наблюдаемые инварианты позволяют понять основные аспекты передвижения на ногах.
С точки зрения проектирования и тестирования циклическая итерация работает лучше всего, если проверенные чертежи можно быстро изменить. Робот Oncilla построен по модульному принципу, т. е. его ноги и туловище, приводы, датчики и контроллеры относительно легко заменяются. Исследования в области передвижения на ногах продолжаются итеративно, и все меньше исследователей заинтересованы в разработке целых роботизированных систем.Проект с открытым исходным кодом робота Oncilla позволяет исследователям, например, тестировать подфункции нового контроллера передвижения. Воспроизведение деталей требует низкого уровня технологий; доступ к универсальному 3D-принтеру и базовой мастерской по механической обработке. Такие компоненты, как бесщеточные двигатели, являются стандартными товарами. Разводка печатной платы и код прошивки включены в исходный код проекта. При необходимости их можно заменить индивидуальными решениями — пользовательские интерфейсы робота Oncilla имеют открытый исходный код.
Начинающему пользователю требуется робот на ногах, которого легко запустить и запустить.Таким образом, выгоден робот с большим набором надежных моделей передвижения. В идеале характеристики передвижения робота должны быть достаточно «послушными». В то же время у робота должен быть потенциал для сложных сценариев походки, таких как быстрое ускорение, повороты и передвижение по склонам.
Oncilla имеет подпружиненную конструкцию ноги, что упрощает управление движением. Как следствие, этот класс ножных роботов, включая «кривоногих роботов», «детенышей гепардов», «роботов-рысей» и «Кен» (Zeglin, 1999; Narioka et al., 2012; Хорамшахи и др., 2013; Spröwitz et al., 2013) может бегать и прыгать с управлением с прямой связью (FFW) и не требует управления на основе моделей или механизмов обратной связи для базового передвижения по ровной местности. Эти роботы работают в режиме FFW на сравнительно низких частотах управления: Spröwitz et al. (2013) сообщают об управлении серводвигателем RC с управляющей частотой всего f = 50 Гц, а также в случае понижающих возмущений во время работы на более высокой скорости.
Для сравнения, роботы с конструкцией ног, такие как MIT Cheetah (Seok et al., 2013) или ANYmal (Hutter et al., 2016) активно разгибают суставы ног против силы тяжести. Для активного разгибания ног требуются специальные контроллеры для контроля силы длины ноги (Hyun et al. , 2014).
, 2014).
С помощью робота Oncilla мы расширяем возможности своего класса роботов благодаря пассивно выдвигающимся пружинным ногам; робот быстро поворачивает, с минимальными радиусами поворота, ходит по склонам вверх и вниз, а также на открытом воздухе по естественным основаниям полностью мобилен, с низкими вычислительными затратами и без необходимости сенсорной обратной связи.
Оставшаяся бумага организована следующим образом. В следующем разделе мы кратко представляем соответствующую работу. Раздел 2 описывает механическое оборудование робота. Раздел 3 объясняет программную архитектуру робота Oncilla. Результаты аппаратных и имитационных экспериментов показаны в разделе 4. Мы обсуждаем дизайн, результаты и будущие направления и предоставляем ссылки на файлы с открытым исходным кодом в разделе 5 и делаем выводы в разделе 6. Дополнительные материалы содержат дополнительные сведения о конструкции робота, кинематике. , и эксперименты.
2. Механическое оборудование
В этом разделе объясняется конструкция робота Oncilla и процесс проектирования его привода. Приведены подробные сведения о конструкции опор, активной степени свободы (DOF) для рулевого управления, датчиках силы, конструкции шасси и электронных схемах.
Приведены подробные сведения о конструкции опор, активной степени свободы (DOF) для рулевого управления, датчиках силы, конструкции шасси и электронных схемах.
2.1. Физические размеры робота
РоботOncilla имеет размеры и вес крупной домашней кошки (таблица 1). Общая длина 0,4 м, расстояние между передними и задними ногами 0,23 м, максимальная высота бедра 0.18 м с висящими в воздухе ногами, высотой в бедре 0,16 м и общей высотой 0,31 м от низа до ручки (рис. 1, 2). Робот имеет боковое расстояние 0,14 м между левой и правой осями приведения/отведения и максимальную ширину 0,25 м. Общий вес составляет 4,5 кг без и 5,1 кг с литий-полимерным аккумулятором емкостью 4500 мАч. Туловище спроектировано с центром масс (ЦМ) на 36 мм ниже оси бедра-плеча. Каждая опора весит 0,2 кг без приводов и 0,6 кг, включая приводы угла наклона опоры и длины опоры.
Таблица 1 . Физические параметры робота Oncilla, массы ног без моторов приведения/отведения (АА). Сокращения: переднее бедро (FH), продольная (FA) плоскость, боковая плоскость (LAT), вертикальная плоскость (VERT), длина ноги (LL), коробка передач (GB).
Сокращения: переднее бедро (FH), продольная (FA) плоскость, боковая плоскость (LAT), вертикальная плоскость (VERT), длина ноги (LL), коробка передач (GB).
Рисунок 1 . Четвероногий робот Oncilla: (A) Фото в изометрии (B) в разобранном виде с приводами (раскрашены) и механическими компонентами. Бесщеточные двигатели угла наклона ноги (LA) расположены параллельно и вне оси бедра (1), бесщеточные двигатели длины ноги (LL) выровнены коаксиально с осью бедра (2).Четырехзвенный механизм (3) приводит и отводит (сустав АА) ногу и приводится в действие серводвигателем RC (4). Пружина параллельной ножки (5) позволяет ножке пантографа вращать дистальный шарнир ножки под нагрузкой, диагональная пружина ножки (6) действует как пружина, компенсирующая гравитацию. Туловище робота (7). (8) показывает датчик вертикальной силы робота, (9) указывает инкрементальный энкодер, установленный на заднем конце каждого бесщеточного двигателя. Мотор LA приводит в движение ногу через цилиндрическую зубчатую пару, передаточное число 84:1 (10), мотор LL приводится в движение специальной планетарной коробкой передач, передаточное число 56:1 (11).(12) показывает заднюю ногу, а (13) переднюю ногу, каждый указатель указывает сегмент ноги l 2 .
Мотор LA приводит в движение ногу через цилиндрическую зубчатую пару, передаточное число 84:1 (10), мотор LL приводится в движение специальной планетарной коробкой передач, передаточное число 56:1 (11).(12) показывает заднюю ногу, а (13) переднюю ногу, каждый указатель указывает сегмент ноги l 2 .
Рисунок 2 . Робот Oncilla: (A) спереди, (B) , вид сбоку компьютерного проектирования, с измерениями высоты бедра робота в положении стоя, его общей высоты, ширины и длины, а также его поперечного и продольного расстояния между тазобедренные и плечевые суставы.
2.2. Привод Исполнение
Выбор надежного привода, состоящего из двигателя и редуктора, не является тривиальной задачей при разработке роботов для маневренного передвижения на ногах.Здесь мы рассмотрели только электромагнитные двигатели из-за простоты их использования в лабораториях.
Мобильные роботы несут собственный вес. Это включает в себя источник питания, то есть в виде батарей, а также печатные платы (PCB), приводы, шасси и датчики. Для снижения энергопотребления и повышения маневренности и грузоподъемности необходимы легкие и эффективные приводы. Для универсального передвижения на ногах требуется не менее двух степеней свободы на ногу. Длина ноги (LL) DOF вставляет силы для поддержания вертикальной позы.Эта LL DOF также используется для сгибания ног во время фазы переноса. Сагиттальный угол ноги (LA) DOF поддерживает движения и крутящие моменты в направлении вперед-назад, а также втягивает и вытягивает ногу. Передвижение роботов на ногах — суровое приложение для электродвигателей. Осциллирующие локомоции на высоких частотах циклов приводят к высоким скоростям в обоих направлениях и высоким пиковым крутящим моментам. Присутствуют «внешние нагрузки». Комбинации двигателя и редуктора приводят к дополнительным «внутренним нагрузкам» и могут значительно превышать внешние требуемые нагрузки (Roos et al.
Это включает в себя источник питания, то есть в виде батарей, а также печатные платы (PCB), приводы, шасси и датчики. Для снижения энергопотребления и повышения маневренности и грузоподъемности необходимы легкие и эффективные приводы. Для универсального передвижения на ногах требуется не менее двух степеней свободы на ногу. Длина ноги (LL) DOF вставляет силы для поддержания вертикальной позы.Эта LL DOF также используется для сгибания ног во время фазы переноса. Сагиттальный угол ноги (LA) DOF поддерживает движения и крутящие моменты в направлении вперед-назад, а также втягивает и вытягивает ногу. Передвижение роботов на ногах — суровое приложение для электродвигателей. Осциллирующие локомоции на высоких частотах циклов приводят к высоким скоростям в обоих направлениях и высоким пиковым крутящим моментам. Присутствуют «внешние нагрузки». Комбинации двигателя и редуктора приводят к дополнительным «внутренним нагрузкам» и могут значительно превышать внешние требуемые нагрузки (Roos et al. , 2006). Этот эффект сильно проявился на роботе Cheetah-cub, маленьком четвероногом роботе, приводимом в действие высокоскоростными радиоуправляемыми серводвигателями. Радиоуправляемые серводвигатели хорошо работают при частоте движения 1 Гц. Однако при частоте движения 4 Гц и больших амплитудах передаточное число редуктора более 300:1 приводило к проблемам с перегревом. Только короткие эксперименты с фазами охлаждения были возможны повторяемыми способами (Spröwitz et al., 2013).
, 2006). Этот эффект сильно проявился на роботе Cheetah-cub, маленьком четвероногом роботе, приводимом в действие высокоскоростными радиоуправляемыми серводвигателями. Радиоуправляемые серводвигатели хорошо работают при частоте движения 1 Гц. Однако при частоте движения 4 Гц и больших амплитудах передаточное число редуктора более 300:1 приводило к проблемам с перегревом. Только короткие эксперименты с фазами охлаждения были возможны повторяемыми способами (Spröwitz et al., 2013).
Чтобы улучшить приведение в действие по сравнению с роботом-детенышем гепарда, мы смоделировали сценарии внешней нагрузки для приводов LL и LA на основе упрощенной траектории стопы.Мы приняли частоты циклов между 0,5 и 3,5 Гц, рассчитанные для четвероногого рыси с размерами робота Oncilla. Эти данные о внешнем нагружении были переданы через систему оптимизации привода (Roos et al., 2006), создав упрощенную динамическую модель двигателя с нагрузкой. Исходя из этого, мы выбрали передаточные числа редуктора в направлении LL (56:1) и LA (84:1) для данного бесщеточного двигателя. Подробная информация о настройке моделирования внешней и внутренней нагрузки приведена в дополнительной документации. При оценке эффективной длины шага в 80 % были рассчитаны транспортные расходы смоделированного робота (Tucker, 1970).Результаты показаны на рис. 7. Модель предсказывает асимптотически снижающийся COT с 7,8 Дж/(Нм) при низкой скорости 0,05 м·с-1, самый низкий COT 2,4 Дж/(Нм) при 0,41 м·с-1, и незначительное увеличение COT при более высоких скоростях [2,7 Дж/(Нм) при 0,71 м·с-1]. Позже мы записали мгновенную мощность аппаратного робота во время движения, что показывает хорошее совпадение. Занижая СОТ аппаратного обеспечения примерно на 25 %, упрощенная модель нагрузки качественно предсказала асимптотически снижающиеся характеристики СОТ аппаратного робота.
Подробная информация о настройке моделирования внешней и внутренней нагрузки приведена в дополнительной документации. При оценке эффективной длины шага в 80 % были рассчитаны транспортные расходы смоделированного робота (Tucker, 1970).Результаты показаны на рис. 7. Модель предсказывает асимптотически снижающийся COT с 7,8 Дж/(Нм) при низкой скорости 0,05 м·с-1, самый низкий COT 2,4 Дж/(Нм) при 0,41 м·с-1, и незначительное увеличение COT при более высоких скоростях [2,7 Дж/(Нм) при 0,71 м·с-1]. Позже мы записали мгновенную мощность аппаратного робота во время движения, что показывает хорошее совпадение. Занижая СОТ аппаратного обеспечения примерно на 25 %, упрощенная модель нагрузки качественно предсказала асимптотически снижающиеся характеристики СОТ аппаратного робота.
2.3. Модель для ног и ступней
Конструкция ноги робота Oncilla является продолжением конструкции ноги робота-детеныша гепарда. Была добавлена одна активная степень свободы для приведения/отведения («сустав AA»), чтобы дать роботу возможность управлять. Комплект пружин с жесткостью 5,8 Н/мм удлиняет ножку пантографа (красная «диагональная пружина», рис. 3). Один сегмент пантографа заменен пружиной растяжения (синяя «параллельная пружина», жесткость k = 7,4 Н/мм). Эта пружина позволяет сгибать дистальный сегмент ноги под нагрузкой.Нога вытягивается на 7 см от самой короткой длины, т. е. в середине замаха, до длины полностью выпрямленной ноги 18 см в воздухе. Установлена короткая опора, подпружиненная торсионной пружиной ( k = 1,21 Нмм/°). Датчики абсолютного положения размещаются на осях бедра и двух суставах ног (дополнительный материал, рисунок S7, q 0 , q 1 , q 2 ). Разность между углами q 1 и q 2 показывает момент внешней нагрузки, действующий на q 2 , т.е.т. е. этот датчик сустава также действует как аналоговый контактный датчик.
Комплект пружин с жесткостью 5,8 Н/мм удлиняет ножку пантографа (красная «диагональная пружина», рис. 3). Один сегмент пантографа заменен пружиной растяжения (синяя «параллельная пружина», жесткость k = 7,4 Н/мм). Эта пружина позволяет сгибать дистальный сегмент ноги под нагрузкой.Нога вытягивается на 7 см от самой короткой длины, т. е. в середине замаха, до длины полностью выпрямленной ноги 18 см в воздухе. Установлена короткая опора, подпружиненная торсионной пружиной ( k = 1,21 Нмм/°). Датчики абсолютного положения размещаются на осях бедра и двух суставах ног (дополнительный материал, рисунок S7, q 0 , q 1 , q 2 ). Разность между углами q 1 и q 2 показывает момент внешней нагрузки, действующий на q 2 , т.е.т. е. этот датчик сустава также действует как аналоговый контактный датчик.
Рисунок 3 . Схематическое представление движения локуса стопы робота Oncilla, созданное для сценария модели с упрощенной динамической нагрузкой (SLDM). Модель SLDM применялась на этапе предварительного проектирования робота для оценки требуемых характеристик двигателя и редуктора. Этот профиль положения стопы использовался для расчета длины ноги (LL, 2) и нагрузки (LA, 1) для аллюра рысью. Диагональная пружина ноги, компенсирующая силу тяжести (красная, 3), сжимается за счет сгибания ноги через тросовый механизм.Зависимое от нагрузки смещение параллельной пружины (4) во время фазы опоры не учитывалось в модели SLDM.
Модель SLDM применялась на этапе предварительного проектирования робота для оценки требуемых характеристик двигателя и редуктора. Этот профиль положения стопы использовался для расчета длины ноги (LL, 2) и нагрузки (LA, 1) для аллюра рысью. Диагональная пружина ноги, компенсирующая силу тяжести (красная, 3), сжимается за счет сгибания ноги через тросовый механизм.Зависимое от нагрузки смещение параллельной пружины (4) во время фазы опоры не учитывалось в модели SLDM.
2.4. Активация длины и угла ноги
Робот был разработан с учетом механических улучшений по сравнению с роботом-детенышем гепарда: увеличение грузоподъемности, добавление дополнительной степени свободы на каждую ногу для эффективного и быстрого поворота, добавление нескольких режимов обнаружения, а также добавление батарей и бортового питания для мобильных устройств. заявление. Каждая дополнительная функция увеличивала вес с 1.1-килограммовый робот-детёныш гепарда на 5,1-килограммового робота Oncilla. Для большего веса робота Oncilla была установлена более жесткая пружина для ног, что, в свою очередь, потребовало привода с более высоким крутящим моментом для механизма сгибания ног. Привод LL монтируется последовательно с приводом угла опоры и укорачивает опору с помощью троса (рис. 3). Эта конструкция имеет положительные последствия: (a) Привод LL не зависит от внешних сил, таких как внезапные удары. Следовательно, установленный редуктор требует более низкого класса безопасности и может быть спроектирован с конструкцией редуктора с более низким модулем.(b) Во время фазы опоры параллельные пружины ног действуют пассивно, т. е. конструкция является близким приближением к механизму, лежащему в основе подпружиненного перевернутого маятника (Бликхан, 1989, шаблон SLIP). Привод сагиттального угла ноги крепится непосредственно к проксимальному сегменту ноги. Длинная и узкая форма двигателя мешала установке двигателей левой и правой ноги в линию. Вместо этого мы применили несимметричное размещение актуатора с опорами относительно близко друг к другу (0,14 м, рис. 2 и рис. S6). Короткое расстояние приводит к короткому плечу момента i.е., для касания ног по диагонали и предназначен для уменьшения перекатывания.
Привод LL монтируется последовательно с приводом угла опоры и укорачивает опору с помощью троса (рис. 3). Эта конструкция имеет положительные последствия: (a) Привод LL не зависит от внешних сил, таких как внезапные удары. Следовательно, установленный редуктор требует более низкого класса безопасности и может быть спроектирован с конструкцией редуктора с более низким модулем.(b) Во время фазы опоры параллельные пружины ног действуют пассивно, т. е. конструкция является близким приближением к механизму, лежащему в основе подпружиненного перевернутого маятника (Бликхан, 1989, шаблон SLIP). Привод сагиттального угла ноги крепится непосредственно к проксимальному сегменту ноги. Длинная и узкая форма двигателя мешала установке двигателей левой и правой ноги в линию. Вместо этого мы применили несимметричное размещение актуатора с опорами относительно близко друг к другу (0,14 м, рис. 2 и рис. S6). Короткое расстояние приводит к короткому плечу момента i.е., для касания ног по диагонали и предназначен для уменьшения перекатывания. Двигатель угла наклона ноги и ось бедра соединены цилиндрическим зубчатым колесом большого модуля (рис. 2). Относительные энкодеры устанавливаются непосредственно на обе оси бесщеточного двигателя. Один абсолютный энкодер установлен на главной оси ЛА. Инкрементальные энкодеры двигателя обеспечивают точное управление двигателем, а абсолютные энкодеры считывают положения сегментов ветвей и нагрузку пружины ветвей.
Двигатель угла наклона ноги и ось бедра соединены цилиндрическим зубчатым колесом большого модуля (рис. 2). Относительные энкодеры устанавливаются непосредственно на обе оси бесщеточного двигателя. Один абсолютный энкодер установлен на главной оси ЛА. Инкрементальные энкодеры двигателя обеспечивают точное управление двигателем, а абсолютные энкодеры считывают положения сегментов ветвей и нагрузку пружины ветвей.
2.5. Тазобедренный сустав приведения и отведения
Для эффективного поворота был установлен дополнительный механизм приведения и отведения бедра (AA).Выбранный привод AA представляет собой мощный серводвигатель RC с позиционным управлением (Kondo KRS 2350 ICS). Он был выбран благодаря своей компактной конструкции, высокому удерживающему моменту и стандартизированному интерфейсу управления. Рупор сервопривода соединяется с ногой через четырехзвенный механизм с диапазоном перемещения ±8° (рис. 2).
2.6. Датчики силы
Индивидуальные двухосевые датчики силы были установлены проксимально, в подвесе АА между туловищем и ногами (199, рис. 1). Датчики силы были спроектированы на основе двойных консольных изгибаемых балок с фольгированными тензометрическими резисторами в полной мостовой конфигурации.Датчики измеряют силы в вертикальном и продольном направлениях в системе координат туловища. Датчики силы робота Oncilla не использовались для походок, показанных в этой работе. Вместо этого все показанные походки генерируются в режиме прямой связи. Однако определение силы необходимо либо для управления на основе модели, основанной на информации о нагрузке на ноги, либо для контроллеров, не основанных на модели, например, с рефлекторной обратной связью (Righetti and Ijspeert, 2008). Поскольку аналогичные эксперименты по передвижению запланированы с роботом Oncilla, сюда включены специально разработанные датчики силы.
1). Датчики силы были спроектированы на основе двойных консольных изгибаемых балок с фольгированными тензометрическими резисторами в полной мостовой конфигурации.Датчики измеряют силы в вертикальном и продольном направлениях в системе координат туловища. Датчики силы робота Oncilla не использовались для походок, показанных в этой работе. Вместо этого все показанные походки генерируются в режиме прямой связи. Однако определение силы необходимо либо для управления на основе модели, основанной на информации о нагрузке на ноги, либо для контроллеров, не основанных на модели, например, с рефлекторной обратной связью (Righetti and Ijspeert, 2008). Поскольку аналогичные эксперименты по передвижению запланированы с роботом Oncilla, сюда включены специально разработанные датчики силы.
Мы рассмотрели два места установки: дистально, т. е. в качестве ног, или проксимально, между туловищем и ногами робота, как окончательно выбранные. При дистальной установке датчиков силы почти не измеряется влияние неподрессоренных масс, а измеряются прямые контакты между ногой и землей. Следовательно, результирующий сигнал силы требует меньшей фильтрации шума. Однако датчики, установленные дистально и на стопе, вращаются вместе с рамой стопы. В случае, если направление силы представляет интерес для контроля, ориентация датчика должна быть пересчитана через последовательную цепочку сегментов туловища, ног и датчика стопы.Механически дистальное размещение датчика смещает центр масс ноги дальше дистально, особенно для более крупных и сложных датчиков. Это также ограничивает установку подпружиненных ножек. Чтобы справиться с резкими ударами о касание, требуется миниатюрная, но в то же время прочная конструкция датчика.
Следовательно, результирующий сигнал силы требует меньшей фильтрации шума. Однако датчики, установленные дистально и на стопе, вращаются вместе с рамой стопы. В случае, если направление силы представляет интерес для контроля, ориентация датчика должна быть пересчитана через последовательную цепочку сегментов туловища, ног и датчика стопы.Механически дистальное размещение датчика смещает центр масс ноги дальше дистально, особенно для более крупных и сложных датчиков. Это также ограничивает установку подпружиненных ножек. Чтобы справиться с резкими ударами о касание, требуется миниатюрная, но в то же время прочная конструкция датчика.
Для сравнения, крепления датчика проксимальной силы относительно не зависят от конструкции ноги и стопы. В нашем случае было достаточно места для монтажа проксимально. Были выбраны и внедрены стандартные датчики на основе тензодатчиков.Недостатки существуют; на проксимально воспринимаемые сигналы силы влияют масса и инерция движущейся ноги, и требуется постобработка данных. Последнее приведет к задержке сигнала датчика. Такие задержки могут представлять собой препятствие, особенно для контроллеров движения с быстрым контуром. Датчики проксимальной силы не требуют пересчета ориентации датчика, так как они закреплены в раме туловища.
Последнее приведет к задержке сигнала датчика. Такие задержки могут представлять собой препятствие, особенно для контроллеров движения с быстрым контуром. Датчики проксимальной силы не требуют пересчета ориентации датчика, так как они закреплены в раме туловища.
2.7. Монтаж электроники и печатных плат
Робот Oncilla оснащен приводами и датчиками, аккумулятором и печатными платами для управления двигателем, питания и связи.Платы управления бесщеточными двигателями были разработаны по индивидуальному заказу, и каждая из четырех плат обеспечивает управление и питание для двух бесщеточных двигателей. Одна плата весит 0,15 кг, и все они установлены низко, в геометрическом центре робота. Такое размещение помогает удерживать ЦМ робота ниже виртуальной оси бедро-плечо — туловище робота «висит» между ними. Остальные печатные платы размещены в передней части робота (RB-110, основные вычисления и связь) и в задней части (блок питания) для легкого доступа. Блок измерения инерции (MicroStrain 3DM-GX3-35 IMU) установлен над платами привода двигателей. Более подробная информация об электронной схеме, компонентах и операционной системе доступна в дополнительных материалах (например, на рисунке S9).
Более подробная информация об электронной схеме, компонентах и операционной системе доступна в дополнительных материалах (например, на рисунке S9).
3. Программное обеспечение
В этом разделе мы описываем концепции, связанные с программным обеспечением, разработанные для робота Oncilla; а именно коммуникационная шина, соединяющая основные платы управления и периферию, контроллер двигателя, программная архитектура робота Oncilla и смоделированная модель робота Oncilla в Webots.
3.1. Коммуникационный уровень и протокол
Связь между основными электронными модулями осуществляется по физическому уровню RS-485, организованному в полудуплексной конфигурации «ведущий-ведомый» «точка-многоточка» (рис. 4).Канал передачи данных и сетевой уровень на шине реализованы через пользовательский простой двоичный протокол связи (SBCP). Последняя реализация является расширением протокола связи Bioloid Dynamixel версии 1 (Robotis Ltd., Co, 2018). Основная модификация — изменение двухбайтовой преамбулы пакета (значение 0xFFFF). Эта преамбула была отделена; одна однобайтовая преамбула (0XFF) и байт ClassID для обозначения типа устройства, к которому мы хотим обратиться, т. е. плата драйвера двигателя, силовая плата или основная плата управления.Зарезервировав значение класса для устройств Bioloid, аппаратное обеспечение и драйвер робота Oncilla могут напрямую включать их.
Эта преамбула была отделена; одна однобайтовая преамбула (0XFF) и байт ClassID для обозначения типа устройства, к которому мы хотим обратиться, т. е. плата драйвера двигателя, силовая плата или основная плата управления.Зарезервировав значение класса для устройств Bioloid, аппаратное обеспечение и драйвер робота Oncilla могут напрямую включать их.
Рисунок 4 . Схема электроники и коммуникационной сети робота Oncilla. Толстые линии изображают питание для бесщеточных двигателей (сплошной красный цвет), серводвигателей (красный пунктир) и логики (синий). Тонкие линии соответствуют коммуникационным шинам. Все четыре опоры оснащены: двумя бесщеточными двигателями (M 1 , M 2 ), одним серводвигателем (S 0 ), тремя абсолютными магнитными энкодерами (ME 1 , ME 2 , ME 3 ). , три канала преобразования тензометрических датчиков (F и , используются два).
Серьезной проблемой при разработке SBCP было требование высокой пропускной способности связи. Первоначально мы стремились к контуру управления 1 кГц на уровне встроенного компьютера, что соответствует скорости передачи данных RS-485 3,3 Мбит/с. Недавно такие высокоскоростные UART стали доступны во встроенных компьютерах (в настоящее время <12 Мбит / с) через USB-последовательную интегральную схему (IC). Однако связь по шине USB запланирована с размером кадра в 1 мс, и простая реализация шины будет ограничена доступом к устройству каждые 2 мс.Вместо этого мы реализовали поток данных управления шиной в специальном устройстве (мастер-плата SBCP), управляемом цифровым сигнальным процессором (DSP) dsPIC33FJ128MC802, установленным после USB-последовательной ИС. Эта основная плата SBCP способна: a) Обрабатывать группу до 8 комбинированных пакетов, отправленных по полнодуплексному соединению UART. б) Управление связью по полудуплексной шине RS-485 с задержкой 12 мкс и максимальным дрожанием 2,2 мкс. c) Обнаружение тайм-аутов ведомого устройства и соответствующее реагирование с помощью настраиваемых пользователем задержек.
Первоначально мы стремились к контуру управления 1 кГц на уровне встроенного компьютера, что соответствует скорости передачи данных RS-485 3,3 Мбит/с. Недавно такие высокоскоростные UART стали доступны во встроенных компьютерах (в настоящее время <12 Мбит / с) через USB-последовательную интегральную схему (IC). Однако связь по шине USB запланирована с размером кадра в 1 мс, и простая реализация шины будет ограничена доступом к устройству каждые 2 мс.Вместо этого мы реализовали поток данных управления шиной в специальном устройстве (мастер-плата SBCP), управляемом цифровым сигнальным процессором (DSP) dsPIC33FJ128MC802, установленным после USB-последовательной ИС. Эта основная плата SBCP способна: a) Обрабатывать группу до 8 комбинированных пакетов, отправленных по полнодуплексному соединению UART. б) Управление связью по полудуплексной шине RS-485 с задержкой 12 мкс и максимальным дрожанием 2,2 мкс. c) Обнаружение тайм-аутов ведомого устройства и соответствующее реагирование с помощью настраиваемых пользователем задержек. Чтобы свести джиттер и задержку к минимуму, мы использовали многие функции оптимизации семейства процессоров dsPIC33FJ, такие как прямой доступ к памяти (DMA), снижение нагрузки на процессор, а также ожидаемые предварительные вычисления и предварительная буферизация пакетов для уменьшения задержки между пакетными ответами. . Все детали реализации собраны в многократно используемой библиотеке SBCP-uc 4. Эта новая библиотека с открытым исходным кодом позволяет быстро разрабатывать интерфейсы SBCP подчиненных устройств для этого семейства процессоров.
Чтобы свести джиттер и задержку к минимуму, мы использовали многие функции оптимизации семейства процессоров dsPIC33FJ, такие как прямой доступ к памяти (DMA), снижение нагрузки на процессор, а также ожидаемые предварительные вычисления и предварительная буферизация пакетов для уменьшения задержки между пакетными ответами. . Все детали реализации собраны в многократно используемой библиотеке SBCP-uc 4. Эта новая библиотека с открытым исходным кодом позволяет быстро разрабатывать интерфейсы SBCP подчиненных устройств для этого семейства процессоров.
3.2. Блок управления двигателем
Специально разработанные платы драйверов двигателей реализуют пропорционально-интегрально-дифференциальный (ПИД) контроллер для двух бесколлекторных двигателей на DSP dsPIC33JF128MC804. Он управляет двумя микросхемами драйвера двигателя A3930, которые используются для управления трехфазным инвертором, состоящим из шести полевых МОП-транзисторов IRFR48Z. Эти ИС способны ограничивать ток обмотки двигателя. Параметры ПИД-регулятора DSP настраивались вручную. Чтобы уменьшить дрожание двигателя во время отслеживания положения, в DSP драйвера двигателя реализована интерполяция профиля скорости.Пользователь устанавливает желаемую частоту слежения, а скорость слежения вычисляется на борту. Первоначально мы наблюдали потери отслеживания траектории каждые несколько секунд. Мы нашли причину в сочетании джиттера связи и несоответствия частоты часов реального времени. Испытанные платы RB-110 имели отклонения частоты кварца до +0,3 % от их стандартной частоты. В качестве обходного пути мы реализовали эвристику точной буферизации и повторной синхронизации часов реального времени на DSP драйвера двигателя. Максимальная частота отслеживания составляет 500 Гц, что составляет половину внутреннего контура управления DSP (1 кГц).
Параметры ПИД-регулятора DSP настраивались вручную. Чтобы уменьшить дрожание двигателя во время отслеживания положения, в DSP драйвера двигателя реализована интерполяция профиля скорости.Пользователь устанавливает желаемую частоту слежения, а скорость слежения вычисляется на борту. Первоначально мы наблюдали потери отслеживания траектории каждые несколько секунд. Мы нашли причину в сочетании джиттера связи и несоответствия частоты часов реального времени. Испытанные платы RB-110 имели отклонения частоты кварца до +0,3 % от их стандартной частоты. В качестве обходного пути мы реализовали эвристику точной буферизации и повторной синхронизации часов реального времени на DSP драйвера двигателя. Максимальная частота отслеживания составляет 500 Гц, что составляет половину внутреннего контура управления DSP (1 кГц).
3.3. Архитектура программного обеспечения
Программная архитектура робота Oncilla основана на двух основных конструктивных решениях, связанных с требованиями открытых исследовательских проектов (Nordmann et al. , 2013): (a) Он обеспечивает общий интерфейс для симулятора и аппаратного обеспечения. Это позволяет легко и быстро переключать эксперименты между моделированием и реальными экспериментами. (b) Он обеспечивает локальный интерфейс для быстрых циклов управления, работающих на встроенном ПК, а также удаленный интерфейс, позволяющий более сложным приложениям управлять роботом по сети.На рис. 5 показана программная архитектура, предоставляющая абстрактный интерфейс как для моделирования, так и для оборудования на разных уровнях интерфейса прикладного программирования (API) в соответствии с требованиями приложения.
, 2013): (a) Он обеспечивает общий интерфейс для симулятора и аппаратного обеспечения. Это позволяет легко и быстро переключать эксперименты между моделированием и реальными экспериментами. (b) Он обеспечивает локальный интерфейс для быстрых циклов управления, работающих на встроенном ПК, а также удаленный интерфейс, позволяющий более сложным приложениям управлять роботом по сети.На рис. 5 показана программная архитектура, предоставляющая абстрактный интерфейс как для моделирования, так и для оборудования на разных уровнях интерфейса прикладного программирования (API) в соответствии с требованиями приложения.
Рисунок 5 . Схематическое представление трехуровневого интерфейса прикладного программирования (API) Oncilla. Уровни API 0–1 для локального доступа, уровень API 2 для поддержки расширенного языка и инструментов по сети.
3.4. Интерфейс моделирования и робота
Одной из основных целей разработки было реализовать общую абстракцию между аппаратным обеспечением и моделированием с бинарной совместимостью, чтобы облегчить перенос между аппаратным обеспечением и моделированием. Абстракция также позволяет заменить серверную часть моделирования, основанную на Webots (Michel, 2004). Здесь мы выбрали программное обеспечение Webots в качестве нашего программного обеспечения для моделирования нескольких тел для робота Oncilla. Поскольку самый низкий уровень API 0 реализован для моделирования и серверной части оборудования, приложения, реализованные для любого уровня API 0–2, можно прозрачно переключать между моделированием и оборудованием (рис. 5). Предоставляя общий абстрактный интерфейс как для моделирования, так и для оборудования, он обеспечивает быстрый и простой перенос экспериментов между этими двумя областями.Также возможно воспроизвести записи реальных экспериментов (например, углов суставов) в моделировании и наоборот.
Абстракция также позволяет заменить серверную часть моделирования, основанную на Webots (Michel, 2004). Здесь мы выбрали программное обеспечение Webots в качестве нашего программного обеспечения для моделирования нескольких тел для робота Oncilla. Поскольку самый низкий уровень API 0 реализован для моделирования и серверной части оборудования, приложения, реализованные для любого уровня API 0–2, можно прозрачно переключать между моделированием и оборудованием (рис. 5). Предоставляя общий абстрактный интерфейс как для моделирования, так и для оборудования, он обеспечивает быстрый и простой перенос экспериментов между этими двумя областями.Также возможно воспроизвести записи реальных экспериментов (например, углов суставов) в моделировании и наоборот.
3.5. Локальный и удаленный интерфейс
Интерфейс Oncilla доступен через локальный интерфейс C++ (уровни API 0 и 1, рис. 5) и удаленно через промежуточное программное обеспечение с открытым исходным кодом для поддержки расширенного языка и инструментов (уровень API 2). Низкоуровневые датчики и исполнительные механизмы доступны локально через интерфейс C++ с использованием множественного наследования для раскрытия таксономии узлов.Локальный интерфейс позволяет запускать легкие приложения с быстрой обратной связью от датчиков на встроенном ПК без задержки в сети. Интерфейс Oncilla также доступен удаленно через сервисную шину Robotics Service Bus (RSB) промежуточного программного обеспечения с открытым исходным кодом с привязками C++, Java, Python и Common Lisp, что позволяет использовать приложения на всех четырех языках (Wienke and Wrede, 2011). Это обеспечивает расширенную поддержку инструментов, например, внешнее ведение журналов, мониторинг и запись экспериментов. Он поддерживает более сложные и ресурсоемкие приложения для запуска на распределенных ПК и управления роботом по сети.Это было успешно применено и продемонстрировано в экспериментах, которые были заданы на предметно-ориентированных языках. Экспериментальный исходный код был сгенерирован автоматически, как и приложения машинного обучения, которые не могут работать на встроенном ПК из-за ограниченности ресурсов (Nordmann et al.
Низкоуровневые датчики и исполнительные механизмы доступны локально через интерфейс C++ с использованием множественного наследования для раскрытия таксономии узлов.Локальный интерфейс позволяет запускать легкие приложения с быстрой обратной связью от датчиков на встроенном ПК без задержки в сети. Интерфейс Oncilla также доступен удаленно через сервисную шину Robotics Service Bus (RSB) промежуточного программного обеспечения с открытым исходным кодом с привязками C++, Java, Python и Common Lisp, что позволяет использовать приложения на всех четырех языках (Wienke and Wrede, 2011). Это обеспечивает расширенную поддержку инструментов, например, внешнее ведение журналов, мониторинг и запись экспериментов. Он поддерживает более сложные и ресурсоемкие приложения для запуска на распределенных ПК и управления роботом по сети.Это было успешно применено и продемонстрировано в экспериментах, которые были заданы на предметно-ориентированных языках. Экспериментальный исходный код был сгенерирован автоматически, как и приложения машинного обучения, которые не могут работать на встроенном ПК из-за ограниченности ресурсов (Nordmann et al. , 2013).
, 2013).
3.6. Webots Модель робота Oncilla
Смоделированная модель робота Oncilla была создана в Webots (Michel, 2004). Он основан на механических свойствах, извлеченных из модели автоматизированного проектирования (CAD) робота Oncilla, т.е.е., вес, центр масс, инерция, размер звена и жесткость пружины. Мотивация использования физического движка, предназначенного для таких игр, как Open Dynamic Engine (ODE, физический движок Webots), заключается в балансе между скоростью моделирования и требуемой точностью моделирования. Внутренние кинематические петли в ноге пантографа робота Oncilla и его асимметричное срабатывание могут быть выражены как ограничение в базовой линейной дополнительной задаче (LCP). У этого подхода есть недостаток; Open Dynamic Engine отдает предпочтение стабильности, а не точности, что приводит к плохому разрешению ограничений.Скорее всего, такой симулятор хорошо подходит для быстрого прототипирования, но меньше подходит для встроенного управления на основе моделей. Мы использовали стандартную модель привода Webots для проксимальных суставов (тазобедренного и плечевого). В этой модели используется ПИД-регулятор с максимальной выходной скоростью и крутящим моментом, ограниченными теоретическими пределами двигателя, т. е. максимальный крутящий момент 53,5 мН·м·84 = 4,5 Н·м и максимальная скорость 16 300 об/мин/60 с·2· pi /84 = 20,3 рад/с (постоянный крутящий момент двигателя 53,5 мНм, общее передаточное число n = 84, скорость вращения двигателя без нагрузки 16300 об/мин).Для степени свободы сгибания и разгибания ноги мы напрямую манипулируем ограничением LCP, чтобы управлять механическим упором диагональной пружины. Поскольку нет простого способа указать максимальный крутящий момент или линейную силу в ODE для удовлетворения заданного ограничения, мы преобразовали это ограничение силы в ограничение скорости, используя модель линейного двигателя с внутренним сопротивлением. Мы упростили и предположили, что крутящий момент двигателя, необходимый для приведения в действие троса длины ноги, вызван сжимающей силой диагональной пружины.
Мы использовали стандартную модель привода Webots для проксимальных суставов (тазобедренного и плечевого). В этой модели используется ПИД-регулятор с максимальной выходной скоростью и крутящим моментом, ограниченными теоретическими пределами двигателя, т. е. максимальный крутящий момент 53,5 мН·м·84 = 4,5 Н·м и максимальная скорость 16 300 об/мин/60 с·2· pi /84 = 20,3 рад/с (постоянный крутящий момент двигателя 53,5 мНм, общее передаточное число n = 84, скорость вращения двигателя без нагрузки 16300 об/мин).Для степени свободы сгибания и разгибания ноги мы напрямую манипулируем ограничением LCP, чтобы управлять механическим упором диагональной пружины. Поскольку нет простого способа указать максимальный крутящий момент или линейную силу в ODE для удовлетворения заданного ограничения, мы преобразовали это ограничение силы в ограничение скорости, используя модель линейного двигателя с внутренним сопротивлением. Мы упростили и предположили, что крутящий момент двигателя, необходимый для приведения в действие троса длины ноги, вызван сжимающей силой диагональной пружины. На самом деле этот крутящий момент является верхней границей, поскольку внешние силы могут вызвать дополнительное сгибание ноги. Мы дополнительно ограничили максимальную скорость, с которой двигатели перемещаются до ограничения механического останова для следующего шага моделирования, пропорционально мгновенному крутящему моменту. Этот предел находится в диапазоне от максимальной скорости без требуемого крутящего момента до нулевой скорости при максимальном требуемом крутящем моменте двигателя. Результирующая модель соответствует простой модели линейного двигателя. Наконец, была разработана реализация серверной части интерфейса C++ уровня 0.Он предоставляет пользователю возможность использовать один и тот же API для беспрепятственного переключения управления между реальным оборудованием или смоделированным роботом.
На самом деле этот крутящий момент является верхней границей, поскольку внешние силы могут вызвать дополнительное сгибание ноги. Мы дополнительно ограничили максимальную скорость, с которой двигатели перемещаются до ограничения механического останова для следующего шага моделирования, пропорционально мгновенному крутящему моменту. Этот предел находится в диапазоне от максимальной скорости без требуемого крутящего момента до нулевой скорости при максимальном требуемом крутящем моменте двигателя. Результирующая модель соответствует простой модели линейного двигателя. Наконец, была разработана реализация серверной части интерфейса C++ уровня 0.Он предоставляет пользователю возможность использовать один и тот же API для беспрепятственного переключения управления между реальным оборудованием или смоделированным роботом.
4. Эксперименты и экспериментальные результаты
В этом разделе описываются результаты экспериментов с аппаратным роботом Oncilla, использующим описанный здесь контроллер с разомкнутым контуром для прямолинейного передвижения в помещении, передвижения по спускам и подъемам по склонам, а также стратегий поворотов с АА-шарнирами и без них. Ссылки на видеоролики о передвижении робота Oncilla приведены в таблице S1.Кроме того, мы предоставляем экспериментальные результаты с имитацией робота Oncilla, работающего в Webots. Расширенные эксперименты с замкнутой системой управления роботом Oncilla задокументированы в Ajallooeian (2015).
Ссылки на видеоролики о передвижении робота Oncilla приведены в таблице S1.Кроме того, мы предоставляем экспериментальные результаты с имитацией робота Oncilla, работающего в Webots. Расширенные эксперименты с замкнутой системой управления роботом Oncilla задокументированы в Ajallooeian (2015).
4.1. Контроллер CPG для прямого передвижения
Для управления движением робота мы применили преобразованные осцилляторы (Ajallooeian et al., 2013c) для реализации модели центрального генератора паттернов (Ijspeert, 2008). Трансформированные осцилляторы — это нелинейные осцилляторы, которые могут кодировать произвольные предельные циклы, определяемые как функции, зависящие от фазы.Учитывая желаемую совместную траекторию, преобразованный осциллятор может быть реализован для кодирования этой траектории как стабильного предельного цикла. Это обеспечивает генератор плавной траектории с возможностью интегрирования обратной связи. Преобразованный осциллятор использует простой осциллятор в качестве основы и трансформирует его для получения желаемого поведения предельного цикла. Здесь мы используем осцилляторы с регулируемой амплитудой единичного радиуса в качестве базы:
Здесь мы используем осцилляторы с регулируемой амплитудой единичного радиуса в качестве базы:
, где θ i , Ω i и r i — фаза, динамика связи и радиальный выход генератора i соответственно.γ — скорость, с которой динамика приближается к предельному циклу, ω — частота передвижения, умноженная на 2π, а c ij и -й и -й -й осциллятор. Разность фаз используется для реализации межсуставной координации. f i (θ) определяет форму предельного цикла i -го осциллятора и fi′(θ)=∂fi(θ)/∂θ.ξ i — аддитивная обратная связь. Его можно разработать с помощью стратегий, описанных в Ajallooeian et al. (2013б,в). r i , интегрирование по времени ṙ i , является эталоном угла соединения для i th DOF.
Для разработки локомотивной походки мы определяем траектории стопы относительно тазобедренного сустава, аналогично Maufroy et al. (2010). Мы используем упрощенную инверсную кинематику замкнутой формы, чтобы преобразовать их в совместные траектории.Эти совместные траектории определяют f i (.) функций. Определение ϕ ij зависит от аллюра, например, для рыси ϕ ij = π для соседних бедер и ϕ ij = 0 для диагональных бедер. Наконец, c ij = 5 для всех осцилляторов. В данной работе мы применяли исключительно походки с открытой петлей. Однако аппаратная и программная архитектура робота Oncilla позволяет использовать внутренние датчики робота и применять управление с обратной связью, т.е.э., с рефлексами и контролем позы (Ajallooeian, 2015).
4.2. Уровень рысью
На рис. 6 показаны экспериментальные данные робота Oncilla, движущегося рысью вперед со средней скоростью 0,55 м/с (Fr = 0,19), на ровной поверхности, на стандартной лабораторной поверхности и с контроллером CPG, описанным в предыдущем разделе, в разомкнутом цикле. режим. Кинематические данные записывались с частотой 240 Гц с помощью системы захвата движения (Naturalpoint, Inc., 2011). Данные о положении и скорости робота отображаются в порядке его направления влево-вправо, вперед-назад и вверх-вниз.Центр масс робота (ЦМ) колебался по вертикали примерно ±5 мм, скорость влево-вправо оставалась в диапазоне ±0,05 м/с. Пиковая скорость этой записи составила 0,78 м/с. Зарегистрированный угол крена на рыси оставался симметричным в районе 0 ± 0,02 рад (0° ± 1,2°), угол тангажа робота колебался в районе 0,06 ± 0,04 рад (3,4° ± 2,3°).
режим. Кинематические данные записывались с частотой 240 Гц с помощью системы захвата движения (Naturalpoint, Inc., 2011). Данные о положении и скорости робота отображаются в порядке его направления влево-вправо, вперед-назад и вверх-вниз.Центр масс робота (ЦМ) колебался по вертикали примерно ±5 мм, скорость влево-вправо оставалась в диапазоне ±0,05 м/с. Пиковая скорость этой записи составила 0,78 м/с. Зарегистрированный угол крена на рыси оставался симметричным в районе 0 ± 0,02 рад (0° ± 1,2°), угол тангажа робота колебался в районе 0,06 ± 0,04 рад (3,4° ± 2,3°).
Рисунок 6 . Аппаратный эксперимент. Положение и скорость центра масс (ЦМ) робота Oncilla наносятся на график с течением времени при частоте цикла передвижения, равной 3.5 Гц. Показаны мгновенная позиция COM (красная пунктирная линия) и скорость (черная точка). Компоненты сортируются по компонентам слева-направо, вперед-назад и вверх-вниз. В этом примере робот бежал рысью со средней скоростью 0,55 м с-1 и максимальной мгновенной (пиковой) скоростью движения вперед 0,78 м с-1. Вертикальное смещение ЦМ робота составило ±5 мм, средняя высота бедра 0,16 м. Средний угол крена вокруг продольной оси составлял ±0,02 рад. Средний угол тангажа вокруг оси влево-вправо составил 0,06 ± 0,04 рад.
Вертикальное смещение ЦМ робота составило ±5 мм, средняя высота бедра 0,16 м. Средний угол крена вокруг продольной оси составлял ±0,02 рад. Средний угол тангажа вокруг оси влево-вправо составил 0,06 ± 0,04 рад.
В дальнейших тестах лучшая скорость рыси робота Oncilla составила 3.5 Гц v = 0,63 м/с. Это эквивалентно 2,7 длины тела в секунду при длине тела 0,23 м (расстояние от плеча до бедра, 2). Наилучшая средняя скорость движения назад составила 0,78 м/с (3,4 BL/с) при частоте движений 4 Гц. Рысь назад с роботом Oncilla показала меньшее проскальзывание, что привело к большей эффективной длине шага. Частоты движения вперед выше 3,5 Гц не привели к увеличению скорости из-за проскальзывания. Ссылки на видеоролики о беге робота как в помещении, так и на открытом воздухе (гравий, ступенька, ровная местность) приведены в таблице S1.
Стоимость транспортировки (COT) измерялась на привязанном роботе (m = 4,5 кг). Потребляемая мощность в режиме ожидания без движения привода была вычтена из всех запусков (19,6 Вт), оставшаяся потребляемая мощность (P) использовалась для расчета стоимости транспортировки (Tucker, 1970): COT=Pmgv=[Дж/(Нм) ] с g = 9,81 м/с 2 и средней скоростью v не менее чем за 4 цикла. Хотя COT часто указывается без единиц измерения, мы используем [Дж/(Нм)], чтобы избежать путаницы со значениями COT, указанными в [Дж/(кг·м)]. Числа Фруда рассчитываются как Fr = v 2 /(gl), где l = 0.Высота бедра стоя 16 м. Значения коэффициента заполнения даны как отношение положения ноги ко времени цикла.
Хотя COT часто указывается без единиц измерения, мы используем [Дж/(Нм)], чтобы избежать путаницы со значениями COT, указанными в [Дж/(кг·м)]. Числа Фруда рассчитываются как Fr = v 2 /(gl), где l = 0.Высота бедра стоя 16 м. Значения коэффициента заполнения даны как отношение положения ноги ко времени цикла.
На рис. 7 показаны записи скорости и стоимости транспортировки (COT) для упрощенного смоделированного («SLDM», раздел 2.2) и аппаратного («реального») робота Oncilla во время движения вперед (квадратные маркеры) и назад (круглые маркеры) рысью. локомоция, более 5 проверенных скоростей. На очень низкой скорости (0,07 м/с) робот двигался вперед с высоким COT 20,4 Дж/(Нм). Он достиг своего лучшего COT вперед при максимальной зарегистрированной скорости на ровной местности: 0.63 м/с с COT 3,2 Дж/(Нм). Передвижение назад было более эффективным на низкой скорости с COT 9,6 Дж/(Нм) при Fr = 0,01. При более высокой скорости назад (0,63 м/с) робот двигался рысью с COT 3,8 Дж/(Нм).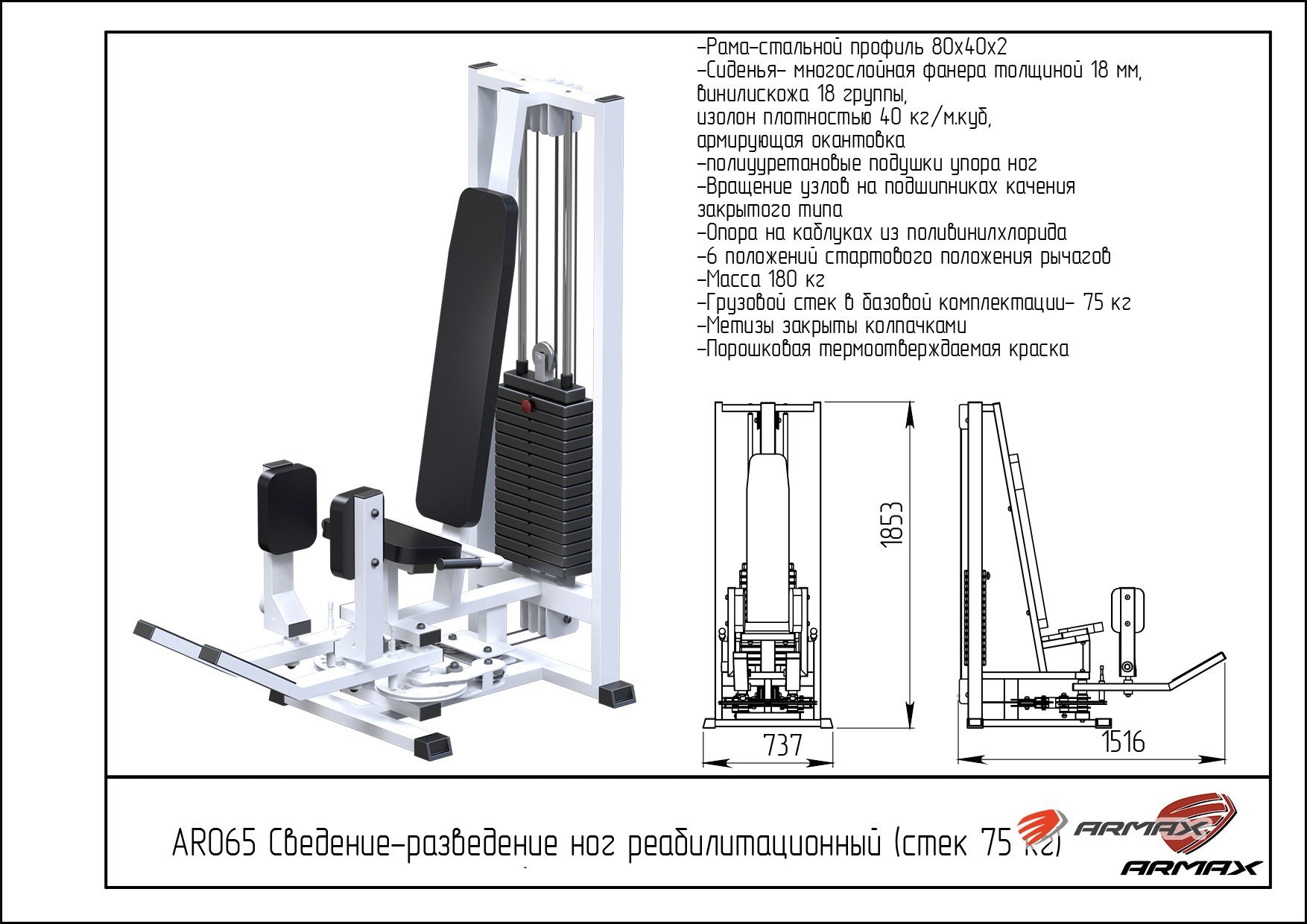
Рисунок 7 . Аппаратный эксперимент и результаты модели динамического двигателя с упрощенной нагрузкой (SLDM). Графики показывают стоимость транспортировки (COT) реального робота Oncilla и модели SLDM на разных скоростях. Полная потребляемая мощность за вычетом потребляемой мощности робота в режиме ожидания (19.6 Вт) использовалось для расчета COT. Красные ромбы (модель SLDM) показывают оценочные значения COT, рассчитанные до создания робота Oncilla на основе упрощенной модели робота с динамическим шарнирным соединением. Темно-синие точки данных показывают значения скорости COT для реального робота Oncilla во время ровной рыси в прямом (FW) направлении. Круглые метки обозначают COT аппаратного робота во время ровной рыси назад (BW). Движение FW показывает более высокий COT до скорости 0,4 м с-1 по сравнению с движением BW.Модель SLDM постоянно занижает COT реального робота, но дает хорошую оценку асимптотического снижения COT с увеличением скорости. Наилучший зарегистрированный COT с настоящим роботом Oncilla составляет 3,2 Дж/(Нм) при 0,63 м с-1 во время рыси FW.
На рис. 7 показано, что модель SLDM занижает COT реального робота. Учитывая свою простоту, модель SLDM хорошо аппроксимирует COT аппаратного робота с 2,8 Дж/(Нм) при скорости 0,71 м/с. Модель также качественно фиксирует асимптотическое уменьшение COT с увеличением скорости.
4.3. Движение вверх и вниз по склону
В Таблице 2 показаны результаты передвижения по наклонным поверхностям, а на Рисунке 8 показано движение по склону вниз в прямом направлении. Все эксперименты на склонах проводились без изменений стандартного контроллера локомоции для рыси по уровню или изменений в оборудовании. Это позволяет лучше сравнивать ровную и наклонную рысь, хотя адаптация трения стопы и моделей походки, а также применение замкнутого контура управления могут улучшить скорость робота (Ajallooeian et al., 2013б). Для эксперимента, описанного в таблице 2, робот Oncilla бежал вперед и назад, выравнивая подъемы и спуски по склонам до 10°.
Таблица 2 . Аппаратный эксперимент.
Аппаратный эксперимент.
Рисунок 8 . Аппаратный эксперимент: снимки робота Oncilla, спускающегося по склону в прямом направлении. Дальнейшие тесты проводились с роботом, поднимающимся по склону, и позволявшим роботу подниматься и спускаться во время движения назад. На более крутых склонах робот Oncilla показал чрезмерное проскальзывание при подъеме по склону в лоб (таблица 2).Как правило, робот работал лучше при движении назад. Снимки здесь перевернуты по горизонтали для удобства чтения.
При наклонах более 4° робот мог подниматься по склонам только при движении назад. Подъем с наибольшим наклоном был зарегистрирован при 10 °, при этом робот двигался назад со скоростью 0,25 м / с с заданной скоростью 0,4 м / с. Робот бежал вперед по склонам 4° со скоростью 0,15 м/с. Внизу робот сохранял заданную скорость 0,4 м/с, когда был направлен вперед.Его скорость увеличилась на 5 % при спуске назад (0,42 м/с). Из видеозаписей мы заметили, что пробежки с сильными отклонениями скорости совпадали с сильным проскальзыванием ног робота.
4.4. Поворотные маневры
Мы использовали две стратегии для реализации токарной обработки. Для первого метода (усиление аддуктора/абдуктора: «AA-amp») синусоидальная волна была встроена в узлы осциллятора, управляющие аддукционным и отводящим суставами. Поворот осуществлялся путем задания амплитуды передних и задних суставов AA ( a l,AA ) с противоположными знаками, пропорциональными желаемой скорости поворота (Δψ рыскания, des ).В усилителе АА время поворота зависит только от амплитуды АА.
fl,AA=al,AAsin(θl,AA) l=1..4 (4) al,AA=λΔψyaw,des (5) λ={+1 l∈{LF,RF}-1 l∈{LH,RH} (6) Для второго метода (асимметричное сокращение длины шага: «поворот ASL») длина шага между левой и правой ногой была изменена для выполнения поворота без использования суставов AA. Мы реализовали стратегию поворота, обычно используемую для двухколесных мобильных роботов; длина шага была укорочена, чтобы ноги с одной стороны тела поворачивались в том же направлении. Робот поворачивается на месте, если длины шагов равны, но с противоположными знаками.
Робот поворачивается на месте, если длины шагов равны, но с противоположными знаками.
a l,asym — усилитель длины шага для ветви l , ϖ — коэффициент поворота. Этот подход привел к небольшому проскальзыванию, потому что ноги, соприкасающиеся с землей (диагональная пара ног, во время аллюра рысью), не находятся на одной оси. Обратите внимание, что в этом подходе время поворота зависит как от заданной скорости движения вперед, так и от коэффициента поворота.
Усиление AA использовалось для большинства случаев поворота, однако быстрое вращение с помощью этого метода приводило к значительно большим усилиям в соединениях AA. Метод ASL в основном использовался для поворота на неровной поверхности. Этот метод не зависит от бокового движения стопы и, следовательно, не представляет опасности бокового спотыкания о препятствия. Количественные результаты экспериментов с этими двумя стратегиями поворота представлены в таблице 3. Они показывают, что AA-amp позволяет поворачиваться на месте, затрачивая на полный оборот 10 с.Стратегия AA приводит к небольшим потерям скорости при повороте, от 20 до 30 %. Радиус поворота зенитного автомата составлял от 0,23 до 0,46 м и зависел от скорости поворота. Для сравнения, метод ASL показал более высокие потери скорости при повороте. Наилучшая конфигурация параметров привела к потере скорости 52 % при радиусе поворота 0,5 м. Наименьший зарегистрированный радиус поворота над уровнем моря составил 0,03 м. Поворотные маневры, в том числе повороты на месте, доступны в виде дополнительных видеороликов (таблица S1).
Они показывают, что AA-amp позволяет поворачиваться на месте, затрачивая на полный оборот 10 с.Стратегия AA приводит к небольшим потерям скорости при повороте, от 20 до 30 %. Радиус поворота зенитного автомата составлял от 0,23 до 0,46 м и зависел от скорости поворота. Для сравнения, метод ASL показал более высокие потери скорости при повороте. Наилучшая конфигурация параметров привела к потере скорости 52 % при радиусе поворота 0,5 м. Наименьший зарегистрированный радиус поворота над уровнем моря составил 0,03 м. Поворотные маневры, в том числе повороты на месте, доступны в виде дополнительных видеороликов (таблица S1).
Таблица 3 .Результаты поворота с двумя разными стратегиями: (а) Усиление движения плеча/бедра в степени свободы отведения/приведения (AA amp).
4.5. Характеристика датчика ноги и усилия
Записанные данные проксимальных датчиков силы, установленных на туловище робота, показывают смешанные результаты (рис. 9). Особенно сигнал горизонтальной силы чувствителен к паразитным напряжениям и деформациям монтажных кронштейнов, вызванным силами между ногами и туловищем. Чтобы сохранить низкий вес, робот разработан из материалов с меньшей жесткостью, таких как пластик, напечатанный на 3D-принтере.Как следствие, подвеска СА прогибается под нагрузкой, что влияет на показания датчиков сил. В сигнале горизонтальной силы это проявляется как высокочастотный шум. Датчик вертикальной силы робота показал хорошее качество сигнала. После калибровки и постобработки можно извлечь вертикальные силы реакции (рис. 9), которые можно использовать для будущих контроллеров с обратной связью.
Чтобы сохранить низкий вес, робот разработан из материалов с меньшей жесткостью, таких как пластик, напечатанный на 3D-принтере.Как следствие, подвеска СА прогибается под нагрузкой, что влияет на показания датчиков сил. В сигнале горизонтальной силы это проявляется как высокочастотный шум. Датчик вертикальной силы робота показал хорошее качество сигнала. После калибровки и постобработки можно извлечь вертикальные силы реакции (рис. 9), которые можно использовать для будущих контроллеров с обратной связью.
Рисунок 9 . Сигнал датчика силы робота Oncilla для (A) аппаратного робота и (B) для его смоделированной модели Webots.Силы даны в единицах массы тела (BW). Регистрируют задние правые (HR) и левые передние (LF) ноги. Вертикальные силы F версия, LF : темно-синяя линия, F версия, HR : светло-синяя линия. Горизонтальные силы F гор., LF : оранжевая линия, F гор. , HR : красная линия. Походка аппаратного робота представляет собой рысь с частотой 2,5 Гц, смоделированный робот бежал с частотой 3,5 Гц. Аппаратные данные были обработаны с помощью коррекции смещения и фильтра нижних частот 18 Гц.Аппаратный эксперимент показывает вертикальные силы около 0,5 BW. Интеграция по времени горизонтальных сил в фазе опоры будет равна нулю при рыси с постоянной скоростью. Однако данные о силе, записанные аппаратным обеспечением, показывают в сумме отрицательный импульс, т. е. данные указывают на замедление робота, в то время как фактический робот двигался рысью с квазинепрерывной скоростью. Мы предполагаем, что смещения создаются из-за внутреннего отклонения монтажных кронштейнов вокруг датчиков горизонтальной силы. Положительные и отрицательные компоненты горизонтальных сил, извлеченных из Webots, примерно равны.
, HR : красная линия. Походка аппаратного робота представляет собой рысь с частотой 2,5 Гц, смоделированный робот бежал с частотой 3,5 Гц. Аппаратные данные были обработаны с помощью коррекции смещения и фильтра нижних частот 18 Гц.Аппаратный эксперимент показывает вертикальные силы около 0,5 BW. Интеграция по времени горизонтальных сил в фазе опоры будет равна нулю при рыси с постоянной скоростью. Однако данные о силе, записанные аппаратным обеспечением, показывают в сумме отрицательный импульс, т. е. данные указывают на замедление робота, в то время как фактический робот двигался рысью с квазинепрерывной скоростью. Мы предполагаем, что смещения создаются из-за внутреннего отклонения монтажных кронштейнов вокруг датчиков горизонтальной силы. Положительные и отрицательные компоненты горизонтальных сил, извлеченных из Webots, примерно равны.
Время фазы опоры и, в некоторой степени, нагрузку на ноги можно оценить, наблюдая за разницей прогибов коленных суставов и подпружиненных голеностопных суставов ( p колено − p голеностопный сустав ). На рис. 10 показан результирующий угловой сигнал с периодической нагрузкой на суставы в каждой фазе опоры. При необходимости этот сигнал угловой разности может быть умножен на жесткость голеностопного сустава, создавая источник сенсорной обратной связи по крутящему моменту голеностопного сустава (здесь не показано).Важно отметить, что этот метод сравнительно дешев как с аппаратной, так и с вычислительной точки зрения. Он не требует дополнительных аппаратных датчиков, предоставляя при этом информацию об углах суставов, времени стояния и нагрузке.
На рис. 10 показан результирующий угловой сигнал с периодической нагрузкой на суставы в каждой фазе опоры. При необходимости этот сигнал угловой разности может быть умножен на жесткость голеностопного сустава, создавая источник сенсорной обратной связи по крутящему моменту голеностопного сустава (здесь не показано).Важно отметить, что этот метод сравнительно дешев как с аппаратной, так и с вычислительной точки зрения. Он не требует дополнительных аппаратных датчиков, предоставляя при этом информацию об углах суставов, времени стояния и нагрузке.
Рисунок 10 . Аппаратный эксперимент. Разница между положением коленного и голеностопного суставов ( p колено − p лодыжка ) нанесена на график для передней левой (синяя линия) и задней левой (красная линия) ноги. Фазы опоры передней ноги показаны серым фоном, белый фон обозначает фазу переноса.Информация о нагрузке на ноги несовершенна, а трение в суставах приводит к задержке и затуханию движений в суставах. Это завышает время загрузки контактов, но может быть отфильтровано. Показанные здесь данные не фильтруются.
Это завышает время загрузки контактов, но может быть отфильтровано. Показанные здесь данные не фильтруются.
4.6. Моделирование веб-ботов Oncilla
Смоделированный робот Oncilla компании Webots (Michel, 2004) позволяет тестировать алгоритмы управления и сценарии передвижения без доступа к реальному оборудованию. Затем контроллер может быть передан роботу с помощью архитектуры программного обеспечения робота Oncilla.Существуют определенные ограничения для прямой передачи параметров управления («передача один к одному») из-за «разрыва реальности» между смоделированным и реальным роботом, которые также объясняются ниже.
Мы реализовали демонстрацию походки Webots со следующими параметрами: частота движений f = 3,5 Гц, желаемая длина шага 12 см, передний и задний угол касания вниз около 2,85 рад. Чтобы максимизировать доступную ретракцию ноги, была установлена высота подъема стопы 4 см. Виртуальный управляемый коэффициент заполнения был равен 0.49, наблюдаемый эффективный коэффициент заполнения 0,52 и 0,58 для передних и задних конечностей соответственно. Остальные контрольные параметры были оптимизированы с помощью схемы PSO (Kennedy and Eberhart, 1995) для максимизации пройденного расстояния за 15-секундный интервал времени, после 5-секундного временного окна для достижения устойчивого состояния. Снимки бегущего робота Webots Oncilla показаны на рисунке 11, соответствующая ссылка на видео приведена в таблице S1 дополнительных материалов.
Остальные контрольные параметры были оптимизированы с помощью схемы PSO (Kennedy and Eberhart, 1995) для максимизации пройденного расстояния за 15-секундный интервал времени, после 5-секундного временного окна для достижения устойчивого состояния. Снимки бегущего робота Webots Oncilla показаны на рисунке 11, соответствующая ссылка на видео приведена в таблице S1 дополнительных материалов.
Рисунок 11 . На снимках показан робот Oncilla, смоделированный в Webots, причем робот движется вправо.Робот бежит со средней скоростью 0,98 м/с при частоте движений 3,5 Гц. Заданный скважность составляет 0,49, наблюдаемая скважность 0,52 и 0,58 для передних и задних ног соответственно. Заданная длина шага составила 0,12 м, наблюдаемая длина шага 0,14 м. В этом прогоне робот разгонялся из неподвижного положения без контролируемого перехода. Соответствующее видео показывает ускорение как короткую качку ствола (ссылка в Таблице S1).
Из результатов мы видим относительно большой разрыв в скорости движения вперед между аппаратным обеспечением и моделированием Webots при одинаковых частотах движения (рис. 6, 12, 3.5 Гц). Аппаратный робот достиг максимальной скорости движения вперед 0,63 м/с при эффективной длине шага 0,09 м. Модель Webots достигла скорости движения вперед 0,98 м/с при эффективной длине шага 0,14 м. COM робота Webots колебался ± 2 мм по вертикали. Смоделированный робот показал, что угол крена колеблется в пределах 0 рад ± 0,015 рад, а углы тангажа колеблются в пределах -0,03 рад ± 0,015 рад.
6, 12, 3.5 Гц). Аппаратный робот достиг максимальной скорости движения вперед 0,63 м/с при эффективной длине шага 0,09 м. Модель Webots достигла скорости движения вперед 0,98 м/с при эффективной длине шага 0,14 м. COM робота Webots колебался ± 2 мм по вертикали. Смоделированный робот показал, что угол крена колеблется в пределах 0 рад ± 0,015 рад, а углы тангажа колеблются в пределах -0,03 рад ± 0,015 рад.
Рисунок 12 . Экспериментируйте с веб-ботами. Результаты нанесены в том же стиле, что и аппаратные результаты на рис. 6.Положение и скорость центра масс смоделированного робота (COM) показаны с течением времени для частоты цикла 3,5 Гц. Показаны компоненты мгновенного положения ЦМ (штриховая красная линия) и скорости (заполненная черная линия), отсортированные по компонентам влево-вправо, вперед-назад и вверх-вниз. Робот достиг средней скорости рыси 0,98 м с-1, при максимальной скорости 1,12 м с-1. Вертикальное смещение ЦМ составило ±2 мм при средней высоте бедра 0,17 м. Средний угол крена составлял ±0,015 рад. Средний угол тангажа был -0.03 ±0,015 рад.
Средний угол крена составлял ±0,015 рад. Средний угол тангажа был -0.03 ±0,015 рад.
Дальнейший анализ траектории стопы показывает, что структура оптимизации увеличила скорость модельного робота за счет точного использования сегмента пальца ноги робота (рис. S1). Это увеличило эффективный шаг на 15 %, с 0,12 м до 0,14 м. В оборудовании мы наблюдали уменьшение эффективной длины шага по сравнению с рекомендованной длиной шага. На частотах выше 3,5 Гц аппаратный робот начинал соскальзывать, а эффективная длина шага уменьшалась до 0,09 м.
Разрыв между симуляцией и реальной аппаратной скоростью затрудняет однозначную передачу параметров управления для походок без обратной связи.Однако параллельно с этой работой модель Webots робота Oncilla была успешно применена для создания прототипа контроллера с обратной связью (Ajallooeian et al., 2013a; Ajallooeian, 2015). Перенос контроллера с обратной связью на аппаратное обеспечение был выполнен с минимальными усилиями и показал лучшее согласование характеристик по сравнению с передачей параметров без обратной связи, показанной здесь.
5. Обсуждение
Робот Oncilla — это небольшой, легкий четвероногий робот с податливыми подпружиненными пантографическими ногами и тремя активными степенями свободы на каждую ногу.Робот бежит без обратной связи в помещении и на улице со скоростью до 0,63 м с-1 (Fr = 0,25). Он преодолевает уклоны до 10° со скоростью 0,25 м/с назад и уклоны до 4° со скоростью 0,15 м/с вперед. Все показанные аппаратные эксперименты относятся к одному контроллеру, для тротлинга, в разомкнутом цикле. Робот спускается по склонам 10° со скоростью 0,42 м с-1 назад и 0,40 м с-1 вперед. Соединения приведения/отведения (AA) робота Oncilla позволяют выполнять маневры быстрого поворота с меньшим радиусом поворота по сравнению с маневрами поворота, в которых используются только суставы угла ноги и длины ноги.Использование шарниров AA позволяет выполнять поворот на месте, полный оборот занимает 10 с. Кроме того, поворот с АА позволяет роботу поворачиваться, в основном сохраняя заданную скорость, т. е. робот потеряет всего 20 % скорости при повороте на радиусе 0,46 м. Робот Oncilla показал лучшую стоимость транспорта (СОТ) при скорости передвижения 0,63 м с-1, с СОТ = 3,2 Дж/(Нм). Доступен набор датчиков для отслеживания положения робота, контакта с землей и сил реакции туловища на ноги для контроля обратной связи. Сеть с высокой пропускной способностью в режиме реального времени (500 Гц) обеспечивает связь между электронными платами робота.Основной контроллер робота работает с частотой 200 Гц в режиме реального времени. Архитектура программного обеспечения робота позволяет прозрачно управлять роботом как на борту, так и удаленно, с несколькими вариантами интерфейса программирования. Это также позволяет управлять аппаратным обеспечением и моделированием Webots с той же архитектурой контроллера. Моделирование динамики многотельных роботов Oncilla в Webots можно использовать для быстрого прототипирования архитектур контроллеров.
е. робот потеряет всего 20 % скорости при повороте на радиусе 0,46 м. Робот Oncilla показал лучшую стоимость транспорта (СОТ) при скорости передвижения 0,63 м с-1, с СОТ = 3,2 Дж/(Нм). Доступен набор датчиков для отслеживания положения робота, контакта с землей и сил реакции туловища на ноги для контроля обратной связи. Сеть с высокой пропускной способностью в режиме реального времени (500 Гц) обеспечивает связь между электронными платами робота.Основной контроллер робота работает с частотой 200 Гц в режиме реального времени. Архитектура программного обеспечения робота позволяет прозрачно управлять роботом как на борту, так и удаленно, с несколькими вариантами интерфейса программирования. Это также позволяет управлять аппаратным обеспечением и моделированием Webots с той же архитектурой контроллера. Моделирование динамики многотельных роботов Oncilla в Webots можно использовать для быстрого прототипирования архитектур контроллеров.
Oncilla включает в себя несколько функций робота-детеныша гепарда (Spröwitz et al. , 2013). Мы реализовали дополнительные возможности поворота с помощью AA DOF робота Oncilla с набором радиоуправляемых серводвигателей, вращающих ногу робота по оси, параллельной оси качения робота. Из-за характера последовательных соединений вся конструкция ноги и ее приводы вращаются с помощью соединения AA. Это работало удовлетворительно для показанных примеров. В случае резких возмущений или для резких боковых шагающих движений потребуется более мощный АА-шарнир.
, 2013). Мы реализовали дополнительные возможности поворота с помощью AA DOF робота Oncilla с набором радиоуправляемых серводвигателей, вращающих ногу робота по оси, параллельной оси качения робота. Из-за характера последовательных соединений вся конструкция ноги и ее приводы вращаются с помощью соединения AA. Это работало удовлетворительно для показанных примеров. В случае резких возмущений или для резких боковых шагающих движений потребуется более мощный АА-шарнир.
Подпружиненные ноги пантографа робота Oncilla хорошо себя зарекомендовали при горизонтальном перемещении в помещении и на открытом воздухе, рыси вверх и вниз по склону, повороте во время движения и повороте на месте.Внутренняя податливость ноги устраняет переопределенные кинематические петли, и все эксперименты можно проводить без обратной связи. Замкнутое управление роботом Oncilla возможно для неструктурированной местности (Ajallooeian et al., 2013b; Ajallooeian, 2015). Текущая конструкция имеет ограничение, которое мы планируем устранить в будущем: нога разгибается только за счет отпускания заряженных пружин разгибателей. Для маневров, требующих более высокой силы ног, таких как прыжки или прыжки, потребуется дополнительный привод или преобразование привода сгибателей робота в привод сгибателей-разгибателей.
Для маневров, требующих более высокой силы ног, таких как прыжки или прыжки, потребуется дополнительный привод или преобразование привода сгибателей робота в привод сгибателей-разгибателей.
Одной из серьезных проблем с роботами с сервоприводом RC является насыщение привода. При комбинированных нагрузках высокой скорости и крутящего момента эти актуаторы нагреваются выше своих возможностей по рассеиванию тепла и требуют регулярных остановок для охлаждения, как в случае с роботом-детенышем гепарда (Spröwitz et al., 2013). Следовательно, приводы LL и LA робота Oncilla были разработаны с учетом низкой стоимости транспортировки и достаточной тепловой мощности за счет более крупных бесщеточных двигателей и оптимизированных передаточных чисел редуктора. Это снижает относительную потребляемую мощность робота и позволяет ему работать, не превышая температуры теплого двигателя, при высокой нагрузке и частоте цикла до 4 Гц.Относительно низкий COT позволяет роботу работать без привязи до 30 минут с литий-полимерным аккумулятором емкостью 4500 мАч. В режиме без обратной связи может быть достигнута хорошая скорость, т. е. 0,63 м с-1 (Fr = 0,25). Оптимизация параметров управления движением и введение обратной связи, вероятно, приведет к увеличению скорости робота. Мы ожидаем, что постоянный прогресс в использовании готовых компонентов приведет к дальнейшему снижению веса робота и повышению его производительности: становятся доступными более компактные, мощные бесщеточные двигатели различных форм-факторов (De and Koditschek, 2015), а также компактные, высокопроизводительные двигатели. мощность, четырехквадрантные контроллеры бесщеточных двигателей (Vedder, 2018).
В режиме без обратной связи может быть достигнута хорошая скорость, т. е. 0,63 м с-1 (Fr = 0,25). Оптимизация параметров управления движением и введение обратной связи, вероятно, приведет к увеличению скорости робота. Мы ожидаем, что постоянный прогресс в использовании готовых компонентов приведет к дальнейшему снижению веса робота и повышению его производительности: становятся доступными более компактные, мощные бесщеточные двигатели различных форм-факторов (De and Koditschek, 2015), а также компактные, высокопроизводительные двигатели. мощность, четырехквадрантные контроллеры бесщеточных двигателей (Vedder, 2018).
Лучшая измеренная стоимость оборудования робота Oncilla, составляющая 3,2 Дж/(Нм), на 54 % ниже, чем COT робота-детеныша гепарда, составляющая 6,9 Дж/(Нм). Tucker (1970) показывает, что метаболические затраты на транспортировку животных снижаются с увеличением массы тела. Это эвристически найденное соотношение предсказывает COT 1,0 Дж/(Нм) для животного весом робота Oncilla ( м = 5 кг). В настоящее время наиболее энергоэффективным, полностью активным четвероногим роботом является 33-килограммовый MIT Cheetah с COT 0.5 Дж/(Нм) на быстром ходу, 6 м/с на рыси (Hyun et al., 2014). В нем используются специально изготовленные бесщеточные приводы и возможности рекуперации энергии.
В настоящее время наиболее энергоэффективным, полностью активным четвероногим роботом является 33-килограммовый MIT Cheetah с COT 0.5 Дж/(Нм) на быстром ходу, 6 м/с на рыси (Hyun et al., 2014). В нем используются специально изготовленные бесщеточные приводы и возможности рекуперации энергии.
Робот Oncilla бежал по склонам с углами наклона до 10°, быстрее и с меньшим проскальзыванием при движении назад. Поскольку больше ничего не изменилось, несоответствие скорости должно быть вызвано асимметрией ног, между ступнями, ориентированными вперед и назад, и пантографическими суставами ног. Необходимы дополнительные исследования, чтобы понять влияние недостаточно активных, сегментированных и подпружиненных ног.
Предоставляя механические, электрические, программные и моделирующие чертежи робота Oncilla с открытым исходным кодом, мы стремимся создать легкодоступную платформу для исследований и обучения. Мы надеемся, что этот проект поможет создать улучшенных роботов и позволит области быстро расти и расширяться. Все исходные файлы доступны онлайн через постоянные репозитории, ссылки приведены в таблице 4. Этот проект был совместно использован несколькими университетами в рамках проекта AMARSi ЕС-FP7, и пять роботов Oncilla были распределены среди партнеров по проекту.
Все исходные файлы доступны онлайн через постоянные репозитории, ссылки приведены в таблице 4. Этот проект был совместно использован несколькими университетами в рамках проекта AMARSi ЕС-FP7, и пять роботов Oncilla были распределены среди партнеров по проекту.
Таблица 4 . Список ссылок на постоянные репозитории роботов Oncilla с открытым исходным кодом.
Недавно гидравлическое и гидравлически-гибридное управление стало интересным выбором для исследования роботов с шарнирно-сочлененной рамой (Whitney et al., 2016). Четвероногие роботы с пневматическим приводом, такие как Pneupard (Rosendo et al., 2014), могут использовать внутреннюю податливость привода и высокие частоты. Это снижает вес и сложность робота. В то же время возможны большие крутящие моменты, угловые амплитуды и частоты движений даже выше 7 Гц (Narioka et al., 2012). Это интересный вариант для будущих электропневматических роботов с гибридными ногами.
Вскоре роботы на ногах должны будут идти в ногу с заявлениями о том, что они работают лучше, чем колесные или гусеничные машины, в загроможденной среде и на пересеченной местности. Робот Boston Dynamics LittleDog показал отличные результаты в качестве общей роботизированной платформы в более ранней задаче DARPA (Righetti et al., 2013). Во время выполнения задач по преодолению препятствий робот LittleDog извлек выгоду из конструкции ног с тремя степенями свободы и очень большого диапазона подвижных суставов.Другие роботы с ногами, такие как робот StarlETH (Hutter et al., 2013) или HyQ (Semini et al., 2011), также реализовали ноги с тремя степенями свободы и большим диапазоном суставов. Шарнир AA робота Oncilla позволяет роботу поворачиваться на месте и эффективно двигаться рысью во время поворота. Для задач на пересеченной местности или для стабилизации робота от внезапных боковых отклонений потребуется более быстрое и прочное соединение AA с большим диапазоном движения.
Робот Boston Dynamics LittleDog показал отличные результаты в качестве общей роботизированной платформы в более ранней задаче DARPA (Righetti et al., 2013). Во время выполнения задач по преодолению препятствий робот LittleDog извлек выгоду из конструкции ног с тремя степенями свободы и очень большого диапазона подвижных суставов.Другие роботы с ногами, такие как робот StarlETH (Hutter et al., 2013) или HyQ (Semini et al., 2011), также реализовали ноги с тремя степенями свободы и большим диапазоном суставов. Шарнир AA робота Oncilla позволяет роботу поворачиваться на месте и эффективно двигаться рысью во время поворота. Для задач на пересеченной местности или для стабилизации робота от внезапных боковых отклонений потребуется более быстрое и прочное соединение AA с большим диапазоном движения.
Малый форм-фактор робота Oncilla показался нам очень полезным. Затраты на производство и комплектующие относительно низки, а обслуживание простое.Благодаря небольшому весу с роботом может безопасно работать один пользователь без установки портала.![]()
Наконец, робот Oncilla предоставляет данные датчиков, энкодеров суставов и двигателей, от гироскопов, датчиков силы и датчиков контакта с землей на основе отклонения пружины ноги. Это позволяет исследовать управление с обратной связью (Ajallooeian et al., 2013a,b; Ajallooeian, 2015) и тестировать биоинспирированные контроллеры передвижения. Это также делает робота Oncilla компактным и относительно недорогим мобильным инструментом для анализа походки.У робота Oncilla есть оставшаяся грузоподъемность для дополнительных датчиков, таких как стереоскопические камеры или дистально установленные датчики силы ног. Коммуникационный интерфейс робота и архитектура программного обеспечения позволяют прозрачно включать такие датчики.
6. Заключение
Мы представили новый совместимый четвероногий робот, его программное обеспечение и систему управления, а также его симуляцию Webots. Мы характеризуем робота Oncilla, движущегося рысью по ровной поверхности, подъему и спуску по склону и во время поворота. Скорость и направление движения устанавливались контроллером без обратной связи во всех экспериментах, без необходимости отслеживать положение робота, внутренние ограничения ног или учитывать проскальзывание стопы.Передавая задачи управления механике, робот Oncilla может передвигаться с низким усилием управления, т. е. с разомкнутым контуром и низкой частотой управления, по различным внутренним и внешним поверхностям. Робот Oncilla достиг максимальной поступательной скорости 0,63 м с-1 при транспортировке COT = 3,2 Дж/(Нм) при весе 5 кг. Робот может поворачиваться на месте или с очень малым радиусом поворота, в зависимости от применяемого контроллера и используемой глубины резкости робота. Представленный пример контроллера передвижения реализует функции походки модульным образом через центральный генератор паттернов.Кроме того, открытая программная архитектура робота Oncilla позволяет тестировать другие подходы к управлению. Для будущих исследований с замкнутым контуром управления датчики встроены и готовы к использованию, т.
Скорость и направление движения устанавливались контроллером без обратной связи во всех экспериментах, без необходимости отслеживать положение робота, внутренние ограничения ног или учитывать проскальзывание стопы.Передавая задачи управления механике, робот Oncilla может передвигаться с низким усилием управления, т. е. с разомкнутым контуром и низкой частотой управления, по различным внутренним и внешним поверхностям. Робот Oncilla достиг максимальной поступательной скорости 0,63 м с-1 при транспортировке COT = 3,2 Дж/(Нм) при весе 5 кг. Робот может поворачиваться на месте или с очень малым радиусом поворота, в зависимости от применяемого контроллера и используемой глубины резкости робота. Представленный пример контроллера передвижения реализует функции походки модульным образом через центральный генератор паттернов.Кроме того, открытая программная архитектура робота Oncilla позволяет тестировать другие подходы к управлению. Для будущих исследований с замкнутым контуром управления датчики встроены и готовы к использованию, т. е. датчики силы реакции, гироскопические датчики, датчики обнаружения ног и датчики абсолютного положения суставов. Механические и электрические чертежи робота Oncilla, прошивка, моделирование и архитектура программного обеспечения доступны с открытым исходным кодом в соответствии с GPLv3 (Free Software Foundation, 2007a) для аппаратного и микропрограммного обеспечения и LGPLv3 (Free Software Foundation, 2007b) для драйверов, моделирования и архитектуры программного обеспечения.Ссылки доступны в таблице 4. Дополнительный документ к этой рукописи включает более подробное описание электронных аппаратных компонентов робота Oncilla, таблицу со ссылками на видеоролики, схематические рисунки и кинематические переменные морфологии ноги робота, а также детали колена и бедра. применена оптимизация двигателя.
е. датчики силы реакции, гироскопические датчики, датчики обнаружения ног и датчики абсолютного положения суставов. Механические и электрические чертежи робота Oncilla, прошивка, моделирование и архитектура программного обеспечения доступны с открытым исходным кодом в соответствии с GPLv3 (Free Software Foundation, 2007a) для аппаратного и микропрограммного обеспечения и LGPLv3 (Free Software Foundation, 2007b) для драйверов, моделирования и архитектуры программного обеспечения.Ссылки доступны в таблице 4. Дополнительный документ к этой рукописи включает более подробное описание электронных аппаратных компонентов робота Oncilla, таблицу со ссылками на видеоролики, схематические рисунки и кинематические переменные морфологии ноги робота, а также детали колена и бедра. применена оптимизация двигателя.
Ссылки на онлайн-видео
1. Робот Oncilla бежит вперед-назад https://youtu.be/38pX1FBRlEA
2. Робот Oncilla бежит по склону 4 https://youtu.быть/c7wudgzZNkc
3.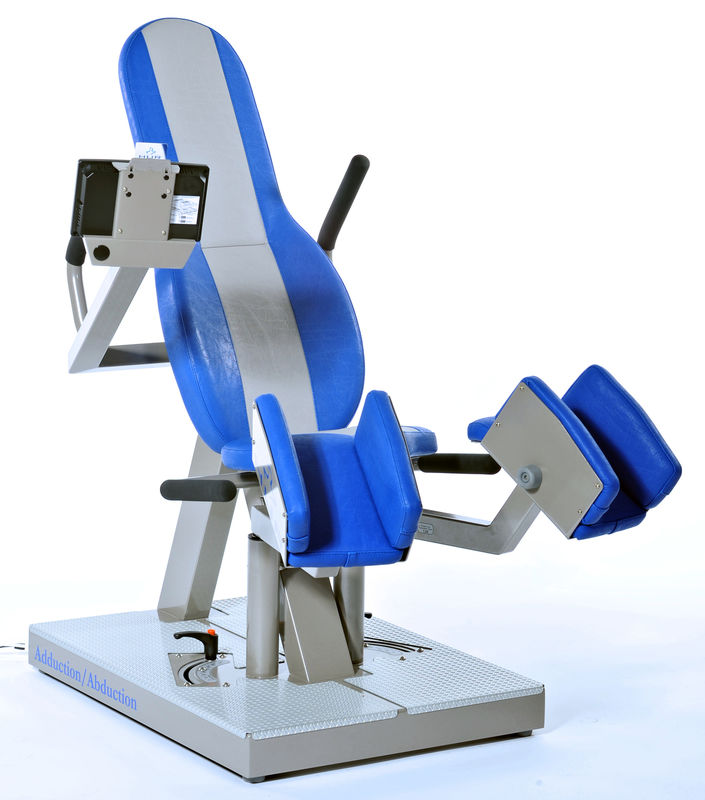 Робот Oncilla поворачивается на месте, в реальном времени https://youtu.be/TH8AB1mdSoY
Робот Oncilla поворачивается на месте, в реальном времени https://youtu.be/TH8AB1mdSoY
4. Робот Oncilla на открытом воздухе https://youtu.be/A20KLlwuwTg
5. Моделирование Webots робота Oncilla, идущего вперед https://youtu.be/0eAhhNvKjGM
Вклад авторов
ATS, AT, MV, RM, PE, MDH и JD участвовали в проектировании и разработке механического и электрического оборудования. AT, MA, MV, RM, MDH, JD и AN участвовали в разработке контроллера, прошивки и программного обеспечения.ATS, AT, MA, MV, RM, PE, MDH, JD и AN внесли свой вклад в эксперименты, определение характеристик и анализ результатов. Все авторы внесли свой вклад в написание и доработку рукописи.
Финансирование
Исследование, приведшее к этим результатам, финансировалось Седьмой рамочной программой Европейского сообщества [FP7/2007-2013 Challenge Cognitive Systems, Interaction, Robotics; соглашение о предоставлении гранта № 248311 (AMARSi)] и от Швейцарского национального научного фонда через Национальный центр компетенций в области исследовательской робототехники. Работа ATS была поддержана стипендией SFRH/BD/51451/2011 от Fundacao para e Cienca e a Tecnologia.
Работа ATS была поддержана стипендией SFRH/BD/51451/2011 от Fundacao para e Cienca e a Tecnologia.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Мы благодарим Джесси ван ден Кибума, который разработал код и предоставил инфраструктуру для платформы оптимизации на основе PSO.Мы благодарим A. Crespi, A. Guignard, M. Heynick, F. Longchamp и Y. Bourquin за техническую поддержку.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/frobt.2018.00067/full#supplementary-material
.Каталожные номера
Аджаллуян, М. (2015). Генерация шаблонов для передвижения по пересеченной местности с помощью четвероногих роботов: преобразованные осцилляторы и сенсорная обратная связь . Кандидатская диссертация, STI, Лозанна.
Кандидатская диссертация, STI, Лозанна.
Аджаллуян, М., Гей, С., Тулеу, А., Шпровиц, А., и Айспеерт, А. Дж. (2013a). «Модульное управление движением с предельным циклом по незаметной пересеченной местности», в 2013 IEEE/RSJ Международная конференция по интеллектуальным роботам и системам (IROS) (Токио: IEEE), 3390–3397.
Академия Google
Ajallooeian, M., Pouya, S., Sprowitz, A., and Ijspeert, A.J. (2013b). «Центральные генераторы шаблонов, дополненные управлением виртуальной моделью для передвижения четвероногих по пересеченной местности», в Международная конференция IEEE по робототехнике и автоматизации (ICRA) , 2013 г. (Карлсруэ: IEEE), 3321–3328.
Академия Google
Аджаллуян, М., ван ден Кибум, Дж., Муковский, А., Гизе, М.А., и Айспеерт, А.Дж. (2013c). Общее семейство преобразованных нелинейных фазовых осцилляторов с произвольной формой предельного цикла. Физ. Д 263, 41–56. doi: 10.1016/j.physd.2013.07.016
Полнотекстовая перекрестная ссылка | Академия Google
Дейли М. А., Волошина А. и Бивенер А.А. (2009). Роль внутренней мышечной механики в нервно-мышечном контроле стабильного бега у цесарок. J. Physiol. 587, 2693–2707. doi: 10.1113/jphysiol.2009.171017
А., Волошина А. и Бивенер А.А. (2009). Роль внутренней мышечной механики в нервно-мышечном контроле стабильного бега у цесарок. J. Physiol. 587, 2693–2707. doi: 10.1113/jphysiol.2009.171017
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Де, А., и Кодичек, Д. Э. (2015). Penn Jerboa: платформа для изучения параллельной композиции шаблонов. Препринт arXiv arXiv: 1502.05347.
Академия Google
Делп, С.Л., Андерсон, Ф.К., Арнольд, А.С., Лоан, П., Хабиб, А., и Джон, К.Т. (2007). OpenSim: программное обеспечение с открытым исходным кодом для создания и анализа динамических симуляций движения». IEEE Trans. Биомед. англ. 54, 1940–1950. doi: 10.1109/TBME.2007.
- 4
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Фолкингем, П.Л., и Гейтси, С.М. (2014). Рождение следа динозавра: трехмерная реконструкция движения под поверхностью и моделирование дискретных элементов раскрывают онтогенез следа. Проц. Натл. акад. науч. США 111, 18279–18284. doi: 10.1073/pnas.1416252111
Проц. Натл. акад. науч. США 111, 18279–18284. doi: 10.1073/pnas.1416252111
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Гулд, С.Дж. и Левонтин, Р. К. (1979). Спандрели Сан-Марко и панглоссианская парадигма: критика адаптационистской программы. Проц. Р. Соц. Лонд. сер. Б. биологических наук. 205, 581–598.
Реферат PubMed | Академия Google
Хаттер, М., Геринг, К., Джуд, Д., Лаубер, А., Белликосо, К.Д., Цунис, В., и другие. (2016). «Animal — высокомобильный и динамичный четвероногий робот», Международная конференция по интеллектуальным роботам и системам (IROS), IEEE/RSJ (IEEE), 2016 г., 38–44.
Академия Google
Хаттер, М., Реми, К., Хёпфлингер, М., и Зигварт, Р. (2013). Эффективное и универсальное передвижение с очень податливыми ногами. IEEE/ASME Trans. мехат. 18, 449–458. doi: 10.1109/ТМЕЧ.2012.2222430
Полнотекстовая перекрестная ссылка | Академия Google
Хён, Д. Дж., Сок, С., Ли, Дж., и Ким, С. (2014). Бег рысью на высокой скорости: реализация иерархического контроллера с использованием проприоцептивного контроля импеданса на MIT Cheetah. Междунар. Дж. Робот. Рез. 33, 1417–1445. дои: 10.1177/02783642150
Дж., Сок, С., Ли, Дж., и Ким, С. (2014). Бег рысью на высокой скорости: реализация иерархического контроллера с использованием проприоцептивного контроля импеданса на MIT Cheetah. Междунар. Дж. Робот. Рез. 33, 1417–1445. дои: 10.1177/02783642150
Полнотекстовая перекрестная ссылка | Академия Google
Айспеерт, А. Дж., Креспи, А., Рыцко, Д., и Кабельген, Ж.-М. (2007). От плавания до ходьбы с роботом-саламандрой, управляемым моделью спинного мозга. Наука 315, 1416–1420. doi: 10.1126/science.1138353
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Кеннеди, Дж., и Эберхарт, Р. (1995). «Оптимизация роя частиц», в материалах Proceedings of the IEEE international Conference on Neural Networks (Perth, WA), Vol.4, 1942–1948 гг.
Хорамшахи, М., Спровиц, А., Тулеу, А., Ахмадабади, М. Н., и Ийспеерт, А. (2013). «Преимущества активного позвоночника, поддерживаемого ограниченным передвижением небольшого податливого четвероногого робота», в Proceedings of 2013 IEEE International Conference on Robotics and Automation (Karlsruhe), 3329–3334.
Академия Google
Ли, К., Умбанховар, П.Б., Комсуоглу, Х., Кодичек, Д.Е., и Гольдман, Д.И. (2009). Чувствительная зависимость движения ногатого робота от зернистой среды. Проц. Натл. акад. науч. США 106, 3029–3034. doi: 10.1073/pnas.08006
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Мофрой, К., Кимура, Х., и Такасе, К. (2010). Интеграция контроля осанки и ритмического движения в четвероногой динамической ходьбе с использованием фазовой модуляции на основе нагрузки/разгрузки ног. Автон. Роботы 28, 331–353. doi: 10.1007/s10514-009-9172-5
Полнотекстовая перекрестная ссылка | Академия Google
Мишель, О.(2004). Cyberbotics Ltd. Webots™: профессиональное моделирование мобильных роботов. Дж. Доп. Робот. Сис. 1, 39–42. дои: 10.5772/5618
Полнотекстовая перекрестная ссылка | Академия Google
Нариока, К., Розендо, А., Шпровиц, А., и Хосода, К. (2012). «Разработка минималистического пневматического четвероногого робота для быстрого передвижения», Международная конференция IEEE по робототехнике и биомиметике (ROBIO), 2012 г. , (Гуанчжоу: IEEE), 307–311.
, (Гуанчжоу: IEEE), 307–311.
Академия Google
Нордманн, А., Рольф М. и Вреде С. (2012). «Абстракции программного обеспечения для моделирования и управления непрерывным роботом», в Simulation, Modeling, and Programming for Autonomous Robots (Tsukuba: Springer), 113–124.
Академия Google
Нордманн, А., Тулеу, А., и Вреде, С. (2013). «Предметно-ориентированный язык и архитектура моделирования для робота oncilla», в ICRA 2013 Workshop on Developments of Simulation Tools for Robotics and Biomechanics , 3.
Ригетти, Л., Бухли Дж., Мистри М., Калакришнан М. и Шаал С. (2013). Оптимальное распределение контактных сил с управлением обратной динамикой. Междунар. Дж. Робот. Рез. 32, 280–298. дои: 10.1177/0278364
9821
Полнотекстовая перекрестная ссылка | Академия Google
Ригетти, Л., и Эйспеерт, А. Дж. (2008). Генераторы паттернов с сенсорной обратной связью для управления движением четвероногих. в материалах Международной конференции IEEE по робототехнике и автоматизации 2008 г. (ICRA 2008) (Пасадена, Калифорния), 819–824.
в материалах Международной конференции IEEE по робототехнике и автоматизации 2008 г. (ICRA 2008) (Пасадена, Калифорния), 819–824.
Академия Google
Роос, Ф., Йоханссон, Х., и Викандер, Дж. (2006). Оптимальный выбор двигателя и редуктора в мехатронных приложениях. Мехатроника 16, 63–72. doi: 10.1016/j.mechatronics.2005.08.001
Полнотекстовая перекрестная ссылка | Академия Google
Розендо, А., Накацу, С., Лю, X., Симидзу, М., и Хосода, К. (2014). «Передвижение на четвероногих, основанное на схеме мышечной активации с рефлексом растяжения», в Международная конференция IEEE по робототехнике и биомиметике (ROBIO), 2014 г., (Бали), 773–778.
Академия Google
Шмитт, С., и Гюнтер, М. (2011). Удар ноги человека: диссипация энергии колеблющихся масс. Арх. заявл. мех. 81, 887–897. doi: 10.1007/s00419-010-0458-z
Полнотекстовая перекрестная ссылка | Академия Google
Семини, К., Цагаракис, Н. Г., Гульельмино, Э., Фокки, М., Каннелла, Ф., и Колдуэлл, Д. Г. (2011). Конструкция HYQ — четвероногого робота с гидравлическим и электрическим приводом. IMechE, I J. Sys. Инж. управления 225, 831–849.дои: 10.1177/0959651811402275
Полнотекстовая перекрестная ссылка | Академия Google
Сок, С., Ван, А., Чуах, М.Ю., Оттен, Д., Ланг, Дж., и Ким, С. (2013). «Принципы проектирования высокоэффективных четвероногих и реализация робота-гепарда Массачусетского технологического института», в 2013 IEEE International Conference on Robotics and Automation , 3307–3312.
Академия Google
Сёнела К., Андрада Э., де Луссанетб М. Х., Вагнерб Х. и Фишера М. С. (2017). «Кинетика прыжков аджилити-собак» в «Инженерия для изменяющегося мира: материалы»; 59-й IWK, Научный коллоквиум Ильменау, Технический университет Ильменау, 11-15 сентября 2017 г. (Ильменау), Vol.59 из 3.2.
Шпровиц, А., Тулеу, А., Веспиньяни, М., Аджаллуян, М., Бадри, Э., и Айспеерт, А. Дж. (2013). На пути к динамичному передвижению рысью – проектирование, управление и эксперименты с детенышом гепарда, податливым четвероногим роботом. Междунар. Дж. Робот. Рез. 32, 932–950. дои: 10.1177/0278364
9205
Полнотекстовая перекрестная ссылка | Академия Google
Уокер, С.М., Швин, Д.А., Моксо, Р., Виклейн, М., Мюллер, Т., Доубе, М., и соавт. (2014). Микротомография с временным разрешением in vivo раскрывает механизм полета мясной мухи. PLoS Биол. 12:e1001823. doi: 10.1371/journal.pbio.1001823
Реферат PubMed | Полный текст перекрестной ссылки | Академия Google
Уитни, Дж. П., Чен, Т., Марс, Дж., и Ходжинс, Дж. К. (2016). «Гибрид гидростатической трансмиссии и безопасный для человека тактильный робот телеприсутствия», в Международная конференция IEEE по робототехнике и автоматизации (ICRA) 2016 г. (Стокгольм: IEEE), 690–695.
Академия Google
Винке, Дж., и Вреде, С. (2011). «Промежуточное программное обеспечение для совместных исследований в области экспериментальной робототехники», на Международном симпозиуме по системной интеграции (Киото), 1183–1190.
Академия Google
Witte, H., Hackert, R., Ilg, W., Biltzinger, J., Schillinger, N., Biedermann, F., et al. (2003). «Четвероногие млекопитающие как образцы шагающих машин». в Proc AMAM — Адаптивное движение животных и машин (Киото).
Академия Google
Зеглин, Г. (1999). Прыгающий робот с изогнутой ногой. к.т.н. диссертация, Университет Карнеги-Меллона, Питтсбург, Пенсильвания.
.