Лфк для восстановления верхних конечностей видео: Операция по восстановлению нервов кисти
Операция по восстановлению нервов кисти
Повреждения нервов кисти возникают при травмах – ушибах и ранениях. В каждом случае врач проверяет функционирование нервов, чтобы исключить поздний диагноз. Характер ранения определяет закрытые и открытые повреждения – когда повреждены кости, сухожилия и подкожная ткань.
Виды повреждений
Повреждения нервов кисти представлены следующими группами.
- Полный разрыв нерва – нейротмезис. Показано хирургическое лечение. Восстановление наступает через месяцы или годы в зависимости от тяжести повреждения.
- Частичный разрыв, сопровождаемый различными нарушениями – нейропраксия – возникает при закрытых травмах. Состояние с сохраненной чувствительностью нерва, когда отсутствие проводимости временное.
- Нейропатия – нарушение в результате перелома, ушиба или пореза в области кисти.
- Защемление нерва, когда пациент не может согнуть кисть. Мизинец полностью обездвижен, безымянный – частично, большой палец двигается с затруднением.


Диагностика
Для простановки диагноза важен осмотр с использованием пальпации и проведения ряда тестов.
- Дискриминационная двухточечная проба – по очереди проверяют чувствительность ветвей и сравнивают реакцию.
- Чувствительная функция лучевого нерва проверяется дискриминационной пробой в двух точках и укалыванием складок большого пальца.
- Моторные ветви тестируют разгибанием суставов.
- Чувствительность локтевого нерва определяют на мизинце, для контроля моторных возможностей пациент с силой разводит пальцы.
- Дополнительные тесты анализа функций локтевого нерва – сгибание безымянного пальца и приведение большого пальца.
- Моторная функция серединного нерва проверяется сгибанием лучезапястного сустава и указательного пальца с противодействием.
- Наглядный тест чувствительности серединного нерва – дискриминационная проба с вложением в ладонь.

Когда показана операция?
- Нарушения чувствительности и функции движения.
- Опухоли.
- Болезненные невромы.
- Сдавление рубцами.
- Повреждения вследствие травм.
- Болевой синдром.
С учетом характера травмы выбирается метод оперативного лечения:
- Иссечение рубцовых образований – невролиз;
- Соединение оболочки нерва и накладывание специального шва;
- Проведение пластики нервной ткани.
При оперативном лечении используются микрохирургические техники, позволяющие выполнить сопоставление максимально точно.
Противопоказания
- Тяжелое состояние пациента, в том числе и в связи с алкогольным опьянением.
- Воспалительный процесс в месте предполагаемого проведения операции.
Лечение

Цель методов консервативного лечения:
- Предупреждение развития деформаций;
- Поддержание тонуса мышц;
- Стимуляция восстановительных процессов;
- Профилактика фиброза.
Реабилитация
Восстановительный период занимает не менее полугода. Сначала восстанавливается осязание, затем чувствительность при прикосновении к двум точкам. Для восстановления важно распознавать предметы на ощупь.
Принципы успешной реабилитации:
- Ранее вмешательство;
- Сокращение риска осложнений;
- Обеспечение заживления;
- Восстановление функций нерва кисти;
- Использование многостороннего подхода.
Восстановление нерва кисти проводят в клинике ЦКБ РАН, в отделении микрохирургии кисти. Здесь имеется все для эффективного лечения разрыва нерва на руке – работают опытные высококвалифицированные хирурги, используется самая современная микрохирургическая аппаратура, заботливое отношение персонала.
Запись на консультацию проводится на сайте. Получить интересующую информацию и узнать цену лечения можно, позвонив по указанному телефону.
Домашняя реабилитация при спастическом парезе по программе GSC «I-CAN»
Автор статьи: к.м.н. Мокиенко О.А., Мендалиева А.С.
Основной проблемой амбулаторного этапа двигательной реабилитации является сложность обеспечения пациентов непрерывной, комплексной и интенсивной программой восстановительного лечения. Необходимость инвалидизированному пациенту преодолевать расстояние до медицинского учреждения и отсутствие постоянного контроля со стороны медперсонала снижают его мотивацию либо увеличивают риск самостоятельного подбора неэффективных или даже опасных упражнений и техник массажа. Также следует выделить проблему обеспечения пациента адекватной двигательной реабилитацией после инъекции ботулинического токсина, то есть проблему недостаточного использования «терапевтического окна», предоставляемого ботулинотерапией в течение 3-4 месяцев.
Применение французской программы домашней реабилитации iGSC «I-CAN» («Я МОГУ») решает многие проблемы внестационарного этапа реабилитации, способствует увеличению мотивации и вовлечённости пациента в интенсивный восстановительный процесс и, тем самым, повышает эффективность его реабилитации.
Программа разработана французским профессором Жаном Мишелем Грасье при поддержке компании Ипсен, производителя ботулинического токсина Диспорт.
Суть домашней реабилитации по программе «iGSC I-CAN»
Программа создана для двигательной реабилитации после инсульта, травмы головного мозга (черепномозговой травмы), после операции на головном мозге, при рассеянном склерозе: при наличии в клинической картине спастического пареза одной или нескольких конечностей.
У программы две точки приложения: на мышцы со спастикой и на их ослабленные антагонисты (мышцы с парезом). Гиперактивность спастических мышц снижается или блокируется на фоне упражнений на пассивное гипер-растяжение и/или за счёт эффекта ботулинического токсина, что делает возможным включать в программу интенсивный тренинг с высокоамплитудными движениями для ослабленных паретичных мышц (Рис.
Рис. 1. Две точки приложения программы iGSC «I-CAN»
Условиями программы являются ежедневное выполнение упражнений, выбранных специалистом по двигательной реабилитации, и ведение дневника по данной программе.
- Всего программа включает:
- 24 вида упражнений на пассивное растяжение различных групп мышц (со спастичностью) верхней и нижней конечности;
- 23 вида активных упражнений для различных групп мышц верхней и нижней конечности;
- 3 вида функциональных упражнений для нижних конечностей.
Специалист по двигательной реабилитации подбирает наиболее подходящие для конкретного пациента упражнения и их интенсивность. Изначально пациент выполняет упражнения под контролем специалиста, а затем самостоятельно с возможным дистанционным контролем. В помощь пациенту: видеоинструкции, электронный или бумажный дневник, печатный иллюстрированный материал.
Данные по эффективности программы домашней реабилитации iGSC «I-CAN»
Результаты двух проспективных кинических исследований программы свидетельствуют о её эффективности даже в резидуальном восстановительном периоде (то есть, когда с момента инсульта прошло более года).
В исследовании с участием 14 пациентов с хроническим гемипарезом (в среднем 52 мес после инсульта) после 9 месяцев ежедневных тренировок в рамках программы наблюдалось увеличение комфортной скорости ходьбы на 49% и максимальной скорости ходьбы на 65% [1].
В другом исследовании было показано, что у пациентов с хроническим гемипарезом (n=16, более 1 года после инсульта) через 1, 2 и 3 года тренировок в рамках программы наблюдалось значительное увеличение угла разгибания в суставах (р
Ниже на видео представлены результаты работы по программе направленной самореабилитации пациента клиники Ренейро. Благодаря его высокой мотивации, правильно подобранному комплексу упражнений и ежедневной работе по программе iGSC I-CAN он смог увеличить не только длину шага, улучшить баланс своего тела, но и увеличить скорость ходьбы.
Видео 1. Восстановление ходьбы после инсульта с помощью программы I-CAN у пациента клиники Ренейро (врач — Мендалиева А.С.). 3 видео в динамике
Восстановление ходьбы после инсульта с помощью программы I-CAN у пациента клиники Ренейро (врач — Мендалиева А.С.). 3 видео в динамике
Пояснения к видео. На первой консультации мы столкнулись со следующими проблемами: укорочение длины шага, ходьба осуществлялась приставными шагами, нарушение баланса (вес всего тела он переносил на здоровую сторону). В результате этих нарушений скорость ходьбы была достаточно ниже нормы. Через месяц после занятий по программе I-CAN, подобранных врачом ЛФК клиники Ренейро, мы отметили у него увеличение длины шага, а также улучшение баланса тела. Скорость ходьбы незначительно, но увеличилась. Через 6 месяцев занятий пациент продемонстрировал значительное увеличение длины шага и скорости ходьбы, улучшение баланса тела. Это позволило ему стать более свободным от помощи окружающих, самостоятельным в ежедневных делах и активным в его социальной жизни.
Организация реабилитации по программе
Врач индивидуально подбирает упражнения и устанавливает их интенсивность (количество повторов, длительность в день), а также обучает пациента правильной технике их выполнения. На это, по опыту клиники Ренейро, требуется всего 2-4 занятия. Затем пациент выполняет упражнения самостоятельно в домашних условиях. Поэтому программа также имеет название «Программа направленной самореабилитации». Немаловажно, что подобная организация процесса реабилитации значительно снижает её стоимость.
На это, по опыту клиники Ренейро, требуется всего 2-4 занятия. Затем пациент выполняет упражнения самостоятельно в домашних условиях. Поэтому программа также имеет название «Программа направленной самореабилитации». Немаловажно, что подобная организация процесса реабилитации значительно снижает её стоимость.
В руководстве к программе подробно описана методика упражнений для каждой мышцы/группы мышц и их обоснование. Выбор упражнений может меняться со временем. Авторы программы разъясняют для пациента: «Каждое упражнение должно быть сложным. Если упражнение со временем становится лёгким – это, с одной стороны, означает, что заметен прогресс в тренировках, с другой – что данное упражнение стало малоэффективным для тренировки мозга. Лечащему врачу в таком случае следует увеличить уровень сложности, подобрав другие упражнения».
Для удобства разработаны специальное мобильное приложение (Рис. 2) и печатное изданиес описанием концепции программы и упражнений на простом, понятном для пациентов языке. В материалах описан смысл каждого упражнения, то есть, когда в повседневной жизни необходимо каждое тренируемое в рамках программы движение.
В материалах описан смысл каждого упражнения, то есть, когда в повседневной жизни необходимо каждое тренируемое в рамках программы движение.
Пациент может вести дневник реабилитации с помощью приложения или используя шаблон дневника в печатном издании.
Рис. 2. Мобильное приложение для пациента.
Специалисты по двигательной реабилитации клиники Ренейро придерживаются следующих общих принципов работы с программой iGSC «I-CAN»:
- первые занятия должны проходить под контролем специалиста, контрольные встречи необходимо проводить через 1-2 недели;
- для поддержания мотивации и вовлеченности пациента необходимо подбирать те упражнения, от проведения которых можно в первую очередь ожидать результат;
- необходимо соблюдение цикла «пассивное растяжение – активное движение – пассивное растяжение»;
- необходимо постепенное увеличение продолжительности занятий;
- обязательно ведение дневника занятий;
- направление пациента к специалисту по ботулинотерапии при наличии показаний.
Ботулинотерапия и программа «I-CAN»
Показаниями к применению ботулинического токсина (БТА) в двигательной реабилитации являются: спастичность от 2 баллов по модифицированной шкале Эшворта, ограничивающая функционирование, уход и самообслуживание; вызванный спастичностью болевой синдром.
Безусловно, при спастическом парезе программа будет более эффективна, если применяется в комплексе с ботулинотерапией. Но так как, по тем или иным причинам, не всегда ботулинотерапия проводится своевременно, мы рекомендуем начинать применение программы I-CAN уже до инъекции: необходимо с первых дней приучить пациента к ежедневным занятиям, ведению дневника, все это повышает его дисциплину и мотивацию.
С течением времени программа может претерпевать ряд изменений, в зависимости от прогресса в занятиях. И если пациент получает инъекцию ботулинического токсина, программа также изменяется (Рис.3): сокращается время, затрачиваемое на растяжения спазмированных мышц, увеличивается время для активных упражнений, и в целом само время общей нагрузки.
Рис. 3. Два варианта выстраивания программы I-CAN, в зависимости от своевременности начала ботулинотерапии.
Ошибки при работе с программой I-CAN
Хотя программа разработана для самостоятельного выполнения, несколько занятий в начале работы с программой должны проводиться строго под контролем специалиста. Это условие описано в руководстве к данной программе, а также подкреплено нашим личным опытом.
По нашим наблюдениям, 100% пациентов, которые начинали заниматься по программе самостоятельно, неверно выбирают интенсивность и очередность упражнений. При этом 60-80% выбранных ими упражнений проводятся с неверной техникой выполнения.
Ниже приведены примеры ошибок и их корректировка врачом клиники Ренейро.
Видео 2. Выполнение на первый взгляд простого упражнения «сесть-встать» (упражнение № 18): неправильная опора на больную ногу, неправильный перенос веса тела.
Выполнение на первый взгляд простого упражнения «сесть-встать» (упражнение № 18): неправильная опора на больную ногу, неправильный перенос веса тела.
Видео 3. Для более эффективного выполнением упражнения на пассивное растяжение большой грудной мышцы (упражнение №21) необходимо сперва достичь максимального разгибания в локтевом суставе.
Видео 4. При выполнении упражнения №22 для тернировки б. грудной мышцы пациент вовлекает корпус тела. Упражнение необходимо делать, выполняя только активное отведение плеча.
После корректировки интенсивности, набора упражнений и техники, эффективность программы заметно улучшается. Как правило, достаточно 2-4 занятий со специалистом для подбора индивидуальной программы тренировок по iGSC I-CAN и обучения пациента правильной технике. Далее пациенты вполне самостоятельно выполняют упражнения дома в течение нескольких месяцев, а затем приезжают для фиксации достигнутых успехов.
Как правило, достаточно 2-4 занятий со специалистом для подбора индивидуальной программы тренировок по iGSC I-CAN и обучения пациента правильной технике. Далее пациенты вполне самостоятельно выполняют упражнения дома в течение нескольких месяцев, а затем приезжают для фиксации достигнутых успехов.
Мнение специалиста клиники Ренейро
Мендалиева А.С.
Врач – невролог, врач ЛФК и спортивной медицины
«У меня только положительный опыт работы с программой I-CAN.
Я рекомендую сначала оценивать двигательный дефицит пациента с помощью теста Френчай, 10-метрового теста ходьбы и качественной оценки ходьбы, с записью на видеокамеру. Затем на основании проведённого тестирования оценивать необходимость ботулинотерапии и составлять индивидуальную программу упражнений.
Программа разработана очень грамотно и значительно повышает вовлеченность пациентов в реабилитацию и их мотивацию, что сказывается на эффективности восстановительного лечения! Это легко отследить, повторно записав выполнение теста Френчай и ходьбу пациента на камеру через несколько месяцев тренировок».
27.08.2017
Источники:
1. S.Alkandari. P042-EN Annals of Physical and Rehabilitation Medicine 54 S (2011) e228-e244
2. M. Pradines. Congress on NeuroRehabilitation and Neural Repair 21 and 22 May 2015 in Maastricht, The Netherlands
карпаральный, локтевой туннельный синдром запястья
Туннельным синдромом запястья называют такое состояние, когда происходит сдавление в карпальном (запястном) канале срединного нерва. Спровоцировать его может компрессия или травма.
Понятие туннельного синдрома не универсально для области запястья, это состояние может проявляться и в других анатомических областях, где нервы пролегают достаточно поверхностно и близко к костным структурам одновременно. Рассматриваемый синдром проявляется в виде снижения или отсутствия чувствительности в большом, указательном, среднем и половине безымянного пальца, а также нарушении двигательной функции в них.
Туннельный синдром запястья нередкая патология и встречается у 1-3 % населения, причем преимущественно у людей, род деятельности, которых связан с мелкой, монотонной моторикой кисти. Половина от всех страдающих данным синдромом это люди, вид занятости, которых связан с использованием компьютера. Также данное заболевание можно считать профпатологией у музыкантов, портных, офисных служащих и пр. Синдром встречается у активного трудоспособного населения в уже зрелом возрасте (40-60 лет), а в 105 случаев и в более молодом возрасте. Ученые пришли к выводу, что у активных пользователей ПК риск развития синдрома на 15 % выше, особенно у женщин.
Причины туннельного синдрома запястья
Срединный нерв в области кисти проходит через туннель образованный поперечной связкой и запястными костями кисти. Спровоцировать сдавление нерва в канале могут:
-
Травматические повреждения кисти. Ушибы, вывихи, растяжения, переломы могут спровоцировать отек связок и мышц или даже смещение костей запястья.
Всё это может сдавить нерв в канале и вызвать нарушение его функции. При правильном лечении все эти процессы обратимы, но если вовремя и правильно не оказать помощь, то контрактуры мышц и связок, а так же деформация костей могут быть уже необратимыми.
-
Артрозы, артриты и прочие патологические суставные процессы различной этиологии и генеза. Вызываемые при данных патологиях отеки и воспалительные реакции, вплоть до некроза тканей так же могут вызвать компрессию нерва. При перманентном протекании воспаления и прогрессировании дегенеративно-дистрофических процессов, суставные поверхности запястья теряют свои свойства и изнашиваются, в результате чего происходит деформация и сдавление нерва в канале уже костными структурами.
-
Воспаление сухожилий или тендовагинит. Воспаление может быть септическим, (вызванное микроорганизмами) и асептическим, (вызванное нагрузкой, переохлаждением и пр.
). Спровоцировать септическое воспаление могут такие заболевания, как гнойные раны кисти, в том числе панариции, неправильная техника взятия крови из пальца и др. Неинфекционное воспаление может быть вызвано хроническим травмирующим напряжением, например частой монотонной моторикой кисти, статической нагрузкой на нее, температурной травмой.
-
Заболевания, которые приводят к задержке воды в организме, могут вызвать отеки конечностей и, как следствие привести к увеличению объемов мягких тканей и сдавлению срединного нерва. Нарушение водно-электролитного состава может вызвать: беременность, прием гормональных противозачаточных препаратов, климакс, заболевания почек и пр.
-
Редко, но встречаются опухоли нервной ткани и срединного нерва в частности. В большинстве своем это доброкачественные новообразования (шванномы, нейрофибромы, перинейромы), но встречаются и злокачественные, проистекающие из оболочек нерва.
Своим ростом опухоль сдавливает нерв, что приводит к его повреждению.
-
Сахарный диабет. Под воздействием фермента протеинкиназой С в нервных тканях начинают разрушаться аккумулированные в процессе болезни сорбитол и фруктоза. Из-за этого, а также из-за нарушения трофики нейронов и их отростков возникает асептическое воспаление нервов и окружающих их тканей. Нарастает отек, который в свою очередь приводит к компрессии нервов, в том числе и срединного.
-
Акромегалия. В результате продолжительного и интенсивного роста человека, страдающего акромегалией, происходят процессы непропорционального разрастания костной и мягких тканей. Срединный нерв может ущемиться в суженом запястном канале из-за увеличенного объема костей и сужения его просвета.
-
Врожденные аномалии развития. Поперечная связка запястья может быть утолщена от рождения, так же встречается скудная продукция сухожильной смазки.
Одним из факторов предрасположенности к туннельному синдрому запястья может послужить анатомическая особенность строения, так называемое «квадратное запястье».
 Всё это может сдавить нерв в канале и вызвать нарушение его функции. При правильном лечении все эти процессы обратимы, но если вовремя и правильно не оказать помощь, то контрактуры мышц и связок, а так же деформация костей могут быть уже необратимыми.
Всё это может сдавить нерв в канале и вызвать нарушение его функции. При правильном лечении все эти процессы обратимы, но если вовремя и правильно не оказать помощь, то контрактуры мышц и связок, а так же деформация костей могут быть уже необратимыми.
 ). Спровоцировать септическое воспаление могут такие заболевания, как гнойные раны кисти, в том числе панариции, неправильная техника взятия крови из пальца и др. Неинфекционное воспаление может быть вызвано хроническим травмирующим напряжением, например частой монотонной моторикой кисти, статической нагрузкой на нее, температурной травмой.
). Спровоцировать септическое воспаление могут такие заболевания, как гнойные раны кисти, в том числе панариции, неправильная техника взятия крови из пальца и др. Неинфекционное воспаление может быть вызвано хроническим травмирующим напряжением, например частой монотонной моторикой кисти, статической нагрузкой на нее, температурной травмой.
 Своим ростом опухоль сдавливает нерв, что приводит к его повреждению.
Своим ростом опухоль сдавливает нерв, что приводит к его повреждению.
 Одним из факторов предрасположенности к туннельному синдрому запястья может послужить анатомическая особенность строения, так называемое «квадратное запястье».
Одним из факторов предрасположенности к туннельному синдрому запястья может послужить анатомическая особенность строения, так называемое «квадратное запястье».
Симптомы туннельного синдрома
-
Чувство онемения пальцев. Рассматриваемый синдром, как правило, развивается постепенно и в основном поражение проявляется односторонне. В основном патологический процесс возникает в той конечности, которая является ведущей, у правшей- правая рука, а у левшей-левая. Развитие синдрома запястного канала происходит постепенно. Однако может наблюдаться и двухсторонний процесс, при заболеваниях эндокринной системы, беременности и пр.
-
Парестезии. Проявляются в виде ощущений покалывания и потери чувствительности в пальцах. Появляются в утренние часы, после пробуждения и в течение нескольких часов проходят. Но со временем эти проявления становятся стабильнее и интенсивнее и уже могут стать постоянными.
Это может привести к нарушению нормальной функции конечности: силы, ловкости и т.д., пациенту приходится производить смену рук при выполнении действий, давать отдых поражённой конечности. Особые неудобства доставляют манипуляции требующие статического напряжения конечности.
-
Боль. При манифестации заболевания может появиться чувство жжения и покалывания в руке, что довольно-таки быстро устраняется опусканием конечности вниз и встряхиванием. Кровоток в руке возобновляется, и болезненные ощущения проходят. Как правило, это происходит во время сна из-за статичного положения руки, либо при монотонной работе выполняемой конечностью. Боли не характерны для каких-то определенных суставов и носят распространенный характер. С прогрессированием болезни боль может охватывать не только пальцы, но и всю кисть и руку вплоть до локтевого сустава, что зачастую затрудняет постановку диагноза. Пациент не может выполнять свои обязанности, потому что боли могут возникать в дневное время.
-
Утрата ловкости и силы. С течением времени, если заболевание не лечить, конечность начинает терять силу и ловкость в движениях. Пациенту трудно удерживать предметы в руках, особенно мелкие, они как бы самопроизвольно выпадают. Пропадает возможность выполнять мелкую моторику (захватывать мелкие вещи, противопоставлять большой палец и т.д.).
-
Снижение чувствительности. Пациент со временем может начать замечать, что он плохо различает температуру предметов, перестает чувствовать прикосновения или даже уколы. Появляется болезненное жжение в руке, онемение.
-
Атрофия мышц. При запущенных формах синдрома может развиться атрофия мышечно-связочного аппарата руки, мышцы и связки не только теряют силу, но и уменьшаются в размерах. Со временем кисть деформируется и обретает форму напоминающую лапу обезьяны.
-
Изменение цвета кожи.
В связи с тем, что при нарушении иннервации кисти происходит и нарушение питания клеток кожи, происходит изменение цвета кожных покровов, они становятся более светлыми и неравномерно окрашенными.
 Это может привести к нарушению нормальной функции конечности: силы, ловкости и т.д., пациенту приходится производить смену рук при выполнении действий, давать отдых поражённой конечности. Особые неудобства доставляют манипуляции требующие статического напряжения конечности.
Это может привести к нарушению нормальной функции конечности: силы, ловкости и т.д., пациенту приходится производить смену рук при выполнении действий, давать отдых поражённой конечности. Особые неудобства доставляют манипуляции требующие статического напряжения конечности.

 В связи с тем, что при нарушении иннервации кисти происходит и нарушение питания клеток кожи, происходит изменение цвета кожных покровов, они становятся более светлыми и неравномерно окрашенными.
В связи с тем, что при нарушении иннервации кисти происходит и нарушение питания клеток кожи, происходит изменение цвета кожных покровов, они становятся более светлыми и неравномерно окрашенными.
Диагностика туннельного синдрома
Для точной постановки диагноза необходима консультация врача-невролога. При этом врач проводит ряд специфических тестов, а так же могут быть использованы лабораторные и инструментальные методы исследования.
Тесты при синдроме запястного канала:
- Тест Тинеля. В наиболее узком месте запястного канала, со стороны ладони при постукивании возникают неприятные ощущения покалывания.
- Тест Фалена. При максимально согнутой кисти в области запястья в течение минуты или менее появляется боль и парестезия.
- Манжеточный тест. На предплечье располагают манжету от аппарата для измерения артериального давления и максимально накачивают. В течение одной минуты при положительной пробе и наличии синдрома появляется чувство онемения и покалывания.
- Тест поднятых рук. Верхние конечности поднимают вертикально вверх и держат в таком положении в течение минуты. При положительном результате неприятные ощущения появляются уже через 30-40 секунд.

Все вышеперечисленные пробы можно производить дома, и при наличии хотя бы одного положительного теста обязательно обратитесь к врачу.
Из инструментальных методов исследования применяют такие как:
- электронейромиография;
- рентгенологические исследования;
- МРТ;
- УЗИ.
Для выявления причин возникновения заболевания пациенту назначают исследование крови и мочи:
- биохимия крови;
- анализ крови и мочи на сахар;
- анализ на тиреотропные гормоны;
- клинический анализ мочи и крови;
- анализ крови на ревматоидный фактор, С-реактивный белок, антистрептолизин-О;
- анализ крови на циркулирующие иммунные комплексы;
- анализ крови на антистрептокиназу.

Лечение туннельного синдрома
Самым главным в лечение синдрома запястного канала является соблюдение мер профилактики развития заболевания. Даже при самом лучшем и качественном лечении без предупреждающих мер не обойтись, потому что эффект может быть просто не достигнут.
- Профилактические меры при синдроме запястного канала. При возникновении первых признаков заболевания необходимо жестко зафиксировать кисть, чтобы не было возможности движений в суставе и как следствие травмирования нерва. Фиксатор может наложить доктор или для временного использования приобрести эластичный бинт в аптеке. В течение двух-трех недель необходимо избегать той деятельности, которая усугубляет симптомы заболевания. Так же для уменьшения отека рекомендуют прикладывать холод в области запястья на 2-3 минуты 2-3 раза в день. В последующем периоде назначают лечение в зависимости от тяжести течения патологического процесса и его выраженности. Если это необходимо, то лечение основывается на терапии основного заболевания (травматического повреждения, гипотиреоза, заболеваний мочевыделительной системы, сахарного диабета и пр. ), вызывающего сдавление нерва в канале.
-
Местное лечение. Включает в себя применение компрессов, введение в полость канала лекарственных средств. Эти процедуры позволяют быстро ослабить болезненные проявления и снять местное воспаление.
- Медикаментозная терапия. Лекарственная терапия в каждом случае подбирается индивидуально в зависимости от основного или сопутствующего заболевания. При этом часто назначают витамины группы В, нестероидные противовоспалительные средства, сосудорасширяющие средства, диуретики, противосудорожные средства, миорелаксанты, глюкокортикостероиды, антидепрессанты и пр.
- Физиотерапия. Может быть использована, как при лекарственной терапии, так в послеоперационном периоде во время реабилитации. При этом применяют: иглоукалывание; приемы мануальной терапии; ультрафонофорез;ударно-волновая терапия. Перед применением физиотерапевтических процедур необходимо проконсультироваться у специалиста на наличие противопоказаний.
 ), вызывающего сдавление нерва в канале.
), вызывающего сдавление нерва в канале.
Хирургическое лечение туннельного синдрома
Если на протяжении 6 месяцев и более консервативная терапия не дает должного эффекта, то имеет смысл задуматься о хирургическом разрешении заболевания. Основная задача оперативного вмешательства состоит в том, чтобы давление на срединный нерв было устранено посредством расширения карпального канала.
Большинство операций проводят под местным обезболиванием. Применяют следующие способы:
-
Открытым доступом: через разрез (5мм) в области карального канала рассекают запястную связку.
-
Эндоскопическая операция. Есть две разновидности эндоскопического вмешательства, через два разреза и через один. В первом случае в один разрез вводят эндоскоп, а во второй инструмент ля рассечения связки. Во втором случае оба инструмента вводятся черед одно отверстие.
По окончании оперативного вмешательства на руку накладывают гипсовую повязку, для иммобилизации конечности. После снятия гипса проводится курс лечебной физкультуры и физиолечения. Как правило, полное восстановление функции кисти происходит в течение полугода. После выздоровления больному можно вернуться к работе, при условии соблюдения охранительного режима, чтобы не спровоцировать рецидив заболевания.В современном мире, где компьютерные технологии внедрены уже повсеместно, рассматриваемая нами патология становится всё более часто встречаемой. Своевременная и квалифицированная помощь, и профилактика при возникновении туннельного синдрома запястного канала позволяет полностью и с достаточной стойкостью добиться ремиссии.
После снятия гипса проводится курс лечебной физкультуры и физиолечения. Как правило, полное восстановление функции кисти происходит в течение полугода. После выздоровления больному можно вернуться к работе, при условии соблюдения охранительного режима, чтобы не спровоцировать рецидив заболевания.В современном мире, где компьютерные технологии внедрены уже повсеместно, рассматриваемая нами патология становится всё более часто встречаемой. Своевременная и квалифицированная помощь, и профилактика при возникновении туннельного синдрома запястного канала позволяет полностью и с достаточной стойкостью добиться ремиссии.
Использование видеоигр в сочетании с традиционной физиотерапией у детей с переломами верхних конечностей: предварительное исследование
Цель: Определить эффект реабилитации с использованием видеоигр в сочетании с традиционной терапией у детей с потерей объема движений (ДД) после консервативного или хирургического лечения переломов верхней конечности.
Методы: В это ретроспективное обсервационное исследование были включены 12 детей (9 мальчиков, 3 девочки, средний возраст 6 лет).75 ± 2,83 года) лечили комбинированной видеоигрой и обычной физиотерапией после перелома верхней конечности. Дети проходили 60-минутную комбинированную терапию (20 минут игровой терапии и 40 минут физиотерапии) два раза в неделю до тех пор, пока терапия больше не была оправдана. В начале и в конце лечения измеряли амплитуду сгибания и разгибания локтевого сустава и запястья, пронацию и супинацию предплечья, а также боль в покое и усилии.
Результаты: У детей значительно увеличилось растяжение (p<0.001) и амплитуда сгибания (p<0,01) в локтевом суставе, увеличение амплитуды сгибания запястья (p<0,05) и уменьшение боли при усилии (p<0,05) в среднем через 6 недель комбинированного лечения.
Вывод: Использование видеоигр с традиционной терапией было эффективным для уменьшения боли и восстановления движений у детей с переломами верхних конечностей.
Ключевые слова: Видеоигры; дети; перелом; методы физиотерапии; терапевтическое использование; верхняя конечность.
Обзор роботизированных устройств для реабилитации верхних конечностей | Journal of NeuroEngineering and Rehabilitation
Platz T: Evidenzbasierte Armrehabilitation: Eine systematische Literaturübersicht [Доказательная реабилитация рук — систематический обзор литературы]. Nervenarzt 2003, 74 (10):841-849. [http://dx.doi.org/10.1007/s00115-003-1549-7] [] 10.1007/s00115-003-1549-7
CAS пабмед Статья Google Scholar
 «>
«>Feys H, Weerdt WD, Verbeke G, Steck GC, Capiau C, Kiekens C, Dejaeger E, Hoydonck GV, Vermeersch G, Cras P: Ранняя и повторяющаяся стимуляция руки может существенно улучшить долгосрочный результат после инсульта: 5-летнее последующее исследование рандомизированного исследования. Ход 2004, 35 (4):924-929. [http://dx.doi.org/10.1161/01.STR.0000121645.44752.f7] [] 10.1161/01.STR.0000121645.44752.f7
PubMed Статья Google Scholar
Patton J, Small SL, Rymer WZ: Функциональное восстановление для перенесших инсульт: информирование об усилиях инженеров. Top Stroke Rehabil 2008, 15 (6):521-541. [http://dx.doi.org/10.1310/tsr1506-521] [] 10.1310/цр1506-521
ПабМед ПабМед Центральный Статья Google Scholar
Richards L, Hanson C, Wellborn M, Sethi A: Восстановление моторного вождения после инсульта. Top Stroke Rehabil 2008, 15 (5):397-411. [http://dx.doi.org/10.1310/tsr1505-397] [] 10.1310/tsr1505-397
Top Stroke Rehabil 2008, 15 (5):397-411. [http://dx.doi.org/10.1310/tsr1505-397] [] 10.1310/tsr1505-397
PubMed Статья Google Scholar
ВОЗ: Глобальное бремя болезней: обновление 2004 г.Всемирная организация здравоохранения (ВОЗ) . 2008 г. [http://www.who.int/healthinfo/global_burden_disease/GBD_report_2004update_full.pdf] []
Google Scholar
Riener R, Nef T, Colombo G: Роботизированная нейрореабилитация верхних конечностей. Med Biol Eng Comput 2005, 43: 2-10. 10.1007/БФ02345116
КАС пабмед Статья Google Scholar
Brewer BR, McDowell SK, Worthen-Chaudhari LC: Постинсультная реабилитация верхних конечностей: обзор роботизированных систем и клинические результаты. Top Stroke Rehabil 2007, 14 (6):22-44. [http://dx.doi.org/10.1310/tsr1406-22] [] 10.1310/tsr1406-22
[http://dx.doi.org/10.1310/tsr1406-22] [] 10.1310/tsr1406-22
PubMed Статья Google Scholar
Gopura RARC, Kiguchi K: Механические конструкции активных роботов-экзоскелетов верхних конечностей: современное состояние и трудности проектирования. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 178-187.
Google Scholar
Cheng HS, Ju MS, Lin CCK: Улучшение крутящего момента в локтевом суставе у пациентов, перенесших инсульт, с помощью вспомогательного крутящего момента, контролируемого сигналами ЭМГ. J Biomech Eng 2003, 125 (6):881-886. 10.1115/1.1634284
ПабМед Статья Google Scholar
Cozens JA: Роботизированная помощь при активных упражнениях на верхнюю конечность у пациентов с неврологическими нарушениями. Rehabil Eng, IEEE Trans 1999, 7 (2):254-256. 10.1109/86.769416
Rehabil Eng, IEEE Trans 1999, 7 (2):254-256. 10.1109/86.769416
КАС Статья Google Scholar
Mavroidis C, Nikitczuk J, Weinberg B, Danaher G, Jensen K, Pelletier P, Prugnarola J, Stuart R, Arango R, Leahey M, Pavone R, Provo A, Yasevac D: Умные портативные реабилитационные устройства. J Neuroeng Rehabil 2005, 2: 18. [http://dx.doi.org/10.1186/1743-0003-2-18] []
PubMed ПабМед Центральный Статья Google Scholar
Song R, yu Tong K, Hu X, Li L: Вспомогательная система управления, использующая непрерывный миоэлектрический сигнал в роботизированной тренировке руки для пациентов после инсульта. IEEE Trans Neural Syst Rehabil Eng 2008, 16 (4):371-379. [http://dx.doi.org/10.1109/TNSRE.2008.7] []
PubMed Статья Google Scholar
 «>
«>Hu X, Tong KY, Song R, Tsang VS, Leung PO, Li L: Изменение моделей коактивации мышц при хроническом инсульте во время роботизированной тренировки локтя. Arch Phys Med Rehabil 2007, 88 (8):1022-1029. [http://дх.doi.org/10.1016/j.apmr.2007.05.006] [] 10.1016/j.apmr.2007.05.006
PubMed Статья Google Scholar
Сонг Р., Тонг К.И., Ху С.Л., Цанг С.Ф., Ли Л.: Терапевтические эффекты миоэлектрически управляемой роботизированной системы для людей после инсульта – экспериментальное исследование. Conf Proc IEEE Eng Med Biol Soc 2006, 1: 4945-4948. [http://dx.doi.org/10.1109/IEMBS.2006.260186] []
CAS пабмед Google Scholar
Kung PC, Ju MS, Lin CCK: Дизайн робота для реабилитации предплечья. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике ICORR . Нордвейк, Нидерланды; 2007: 228-233.
Нордвейк, Нидерланды; 2007: 228-233.
Google Scholar
Kung PC, Lin CCK, Ju MS, Chen SM: Динамика аномальных синергий у пациентов, перенесших инсульт, которых лечили и оценивали с помощью нейрореабилитационного робота. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 12-17.
Google Scholar
Colombo R, Pisano F, Mazzone A, Delconte C, Micera S, Carrozza MC, Dario P, Minuco G: Разработка стратегий для повышения мотивации пациентов во время роботизированной реабилитации. J Neuroeng Rehabil 2007, 4: 3. [http://dx.doi.org/10.1186/1743-0003-4-3] []
PubMed ПабМед Центральный Статья Google Scholar
Hu XL, Tong KY, Song R, Zheng XJ, Lui KH, Leung WWF, Ng S, Au-Yeung SSY: Количественная оценка процесса восстановления двигательных функций у пациентов с хроническим инсультом во время роботизированной тренировки запястья. J Электромиогр Кинезиол 2009, 19 (4):639-650.[http://dx.doi.org/10.1016/j.jelekin.2008.04.002] [] 10.1016/j.jelekin.2008.04.002
J Электромиогр Кинезиол 2009, 19 (4):639-650.[http://dx.doi.org/10.1016/j.jelekin.2008.04.002] [] 10.1016/j.jelekin.2008.04.002
CAS пабмед Статья Google Scholar
Hu XL, Tong KY, Song R, Zheng XJ, Leung WWF: Сравнение между роботом, управляемым электромиографией, и устройством пассивного движения при реабилитации запястья при хроническом инсульте. Neurorehabil Neural Repair 2009, 23 (8):837-846. [http://dx.doi.org/10.1177/1545968309338191] [] 10.1177/1545968309338191
КАС пабмед Статья Google Scholar
Sale P, Lombardi V, Franceschini M: Ручная роботизированная реабилитация: возможность и предварительные результаты роботизированного лечения пациентов с гемипарезом. Stroke Res Treat 2012, 2012: 820931. [http://dx.doi.org/10. 1155/2012/820931] []
1155/2012/820931] []
PubMed ПабМед Центральный Google Scholar
Chen M, Ho SK, Zhou HF, Pang PMK, Hu XL, Ng DTW, Tong KY: Интерактивный реабилитационный робот для тренировки функций рук. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 777-780.
Google Scholar
Тернер М., Гомес Д., Тремблей М., Каткоски М.: Предварительные испытания устройства тактильной обратной связи с заземлением руки в телеманипуляции. В Proc. ASME Dynamic Systems and Control Division . Анахайм, Калифорния; 1998:145-149.
Google Scholar
Ertas IH, Hocaoglu E, Barkana DE, Patoglu V: Экзоскелет пальца для лечения повреждений сухожилий. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 194-201.
Киото, Япония; 2009: 194-201.
Google Scholar
Fuxiang Z: Встроенная платформа управления машиной непрерывного пассивного движения для травмированных пальцев. В Реабилитационная робототехника . Под редакцией: Комму С.С. Вена, Австрия: Издательство I-Tech Education Publishing; 2007: 579-606.
Google Scholar
Vanoglio F, Luisa A, Garofali F, Mora C: Оценка эффективности Gloreha (перчатки для реабилитации рук) у пациентов с гемиплегией.Обучение пилота. В XIII Конгресс Итальянского общества нейрореабилитации, 18-20 апреля . Италия: Бари; 2013.
Google Scholar
Parrinello I, Faletti S, Santus G: Использование устройства непрерывного пассивного движения для реабилитации кисти: клинические испытания на неврологических пациентах. In 41 Национальный конгресс Итальянского общества медицины и физической реабилитации, 14-16 октября . Рим, Италия; 2013.
In 41 Национальный конгресс Итальянского общества медицины и физической реабилитации, 14-16 октября . Рим, Италия; 2013.
Google Scholar
Varalta V, Smania N, Geroin C, Fonte C, Gandolfi M, Picelli A, Munari D, Ianes P, Montemezzi G, La Marchina E: Влияние пассивной реабилитации верхней конечности с помощью роботизированного устройства Gloreha на зрение -возможности пространственного и внимательного исследования пациентов с инсультом. В XIII Конгресс Итальянского общества нейрореабилитации, 18-20 апреля . Бари, Италия; 2013.
Google Scholar
Ho NSK, Tong KY, Hu XL, Fung KL, Wei XJ, Rong W, Susanto EA: Ручной роботизированный тренажер с экзоскелетом, управляемый ЭМГ, для пациентов с хроническим инсультом: система обучения задачам для реабилитации после инсульта. Реабилитационный робот IEEE Int Conf; Boston, MA 2011, 2011: 5975340. [http://dx.doi.org/10.1109/ICORR.2011.5975340] []
[http://dx.doi.org/10.1109/ICORR.2011.5975340] []
CAS Google Scholar
Шабовски К.Н., Годфри С.Б., Холли Р.Дж., Лам П.С., Разработка и пилотные испытания реабилитационного робота HEXORR: ручной EXOskeleton. J Neuroeng Rehabil 2010, 7: 36. [http://dx.doi.org/10.1186/1743-0003-7-36] []
PubMed ПабМед Центральный Статья Google Scholar
Клайн Т., Кампер Д., Шмит Б.: Система управления для перчаток с пневматическим управлением для облегчения захвата. В Proc. 9-я Международная конференция по реабилитационной робототехнике ICORR . Чикаго, Иллинойс; 2005:78-81.
Google Scholar
Mulas M, Folgheraiter M, Gini G: Управляемый ЭМГ экзоскелет для реабилитации кисти. В Proc. 9-я Международная конференция по реабилитационной робототехнике ICORR . Чикаго, Иллинойс; 2005: 371-374.
Чикаго, Иллинойс; 2005: 371-374.
Google Scholar
Hesse S, Kuhlmann H, Wilk J, Tomelleri C, Kirker SGB: Новый электромеханический тренажер для сенсомоторной реабилитации парализованных пальцев: серия случаев у пациентов с хроническим и острым инсультом. J Neuroeng Rehabil 2008, 5: 21. [http://dx.doi.org/10.1186/1743-0003-5-21] []
PubMed ПабМед Центральный Статья Google Scholar
Rotella MF, Reuther KE, Hofmann CL, Hage EB, BuSha BF: Ортопедический вспомогательный экзоскелет для захвата и захвата. In Конференция по биоинженерии, 35-я ежегодная конференция IEEE на северо-востоке . Бостон, Массачусетс; 2009:1-2. [http://dx.doi.org/10.1109/NEBC.2009.4967693] []
Google Scholar
Саракоглу И. , Цагаракис Н.Г., Колдуэлл Д.Г.: Трудотерапия и физиотерапия с использованием тренажера на основе ручного экзоскелета. В Proc. Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) . Сендай, Япония; 2004: 2973-2978.
, Цагаракис Н.Г., Колдуэлл Д.Г.: Трудотерапия и физиотерапия с использованием тренажера на основе ручного экзоскелета. В Proc. Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) . Сендай, Япония; 2004: 2973-2978.
Google Scholar
Tong KY, Ho SK, Pang PK, Hu XL, Tam WK, Fung KL, Wei XJ, Chen PN, Chen M: Роботизированная система для обучения задачам, управляемая намерением. In Conf Proc IEEE Eng Med Biol Soc . Буэнос-Айрес, Аргентина; 2010:3406-3409. [http://dx.doi.org/10.1109/IEMBS.2010.5627930] []
Google Scholar
Wege A, Hommel G: Разработка и контроль экзоскелета кисти для реабилитации после травм кисти. В разделе «Интеллектуальные роботы и системы» (IROS 2005). 2005 Международная конференция IEEE/RSJ по . Эдмонтон, Канада; 2005:3046-3051.
Глава Google Scholar
 «>
«>Уорснопп Т.Т., Пешкин М.А., Колгейт Дж.Е., Кампер Д.Г.: Экзоскелет пальца с приводом для реабилитации кисти после инсульта. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике ICORR . Нордвейк, Нидерланды; 2007:896-901.
Google Scholar
Xing K, Xu Q, He J, Wang Y, Liu Z, Huang X: Носимое устройство для повторяющейся терапии рук. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике BioRob . Скоттсдейл, Аризона; 2008:919-923.
Google Scholar
Ellis MD, Sukal T, DeMott T, Dewald JPA: Упражнения ACT 3D нацелены на дискоординацию, вызванную гравитацией, и помогают людям с инсультом добраться до рабочего места. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике ICORR . Нордвейк, Нидерланды; 2007:890-895.
Google Scholar
Кан Л.Е., Лум П.С., Раймер В.З., Рейнкенсмейер Д.Дж.: Роботизированная тренировка движений руки, пораженной инсультом: имеет ли значение, что делает робот? J Rehabil Res Dev 2006, 43 (5):619-630. 10.1682/JRRD.2005.03.0056
PubMed Статья Google Scholar
Chang JJ, Tung WL, Wu WL, Huang MH, Su FC: Влияние роботизированной двусторонней изокинетической тренировки рук в сочетании с традиционной реабилитацией на двигательную функцию руки у пациентов с хроническим инсультом. Arch Phys Med Rehabil 2007, 88 (10):1332-1338. [http://dx.doi.org/10.1016/j.apmr.2007.07.016] [] 10.1016/j.apmr.2007.07.016
PubMed Статья Google Scholar
Volpe BT, Krebs HI, Hogan N, OTR LE, Diels C, Aisen M: Новый подход к реабилитации после инсульта: сенсомоторная стимуляция с помощью робота.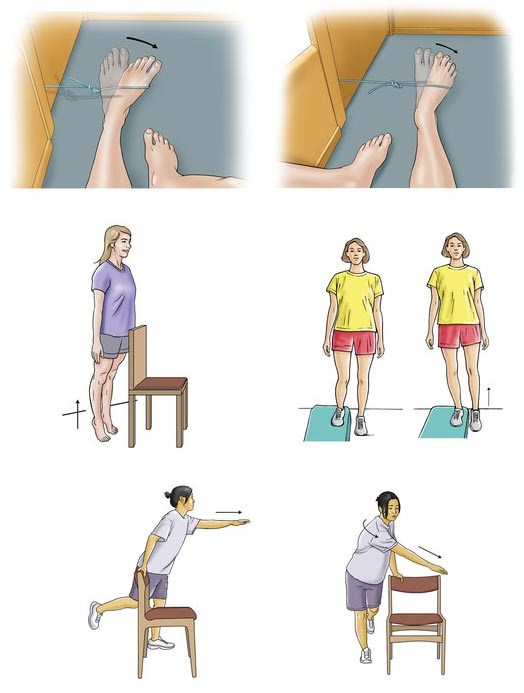 Неврология 2000, 54 (10):1938-1944. 10.1212/WNL.54.10.1938
Неврология 2000, 54 (10):1938-1944. 10.1212/WNL.54.10.1938
КАС пабмед Статья Google Scholar
Рабади М., Галгано М., Линч Д., Акерман М., Лессер М., Вольпе Б.: Пилотное исследование терапии, основанной на активности, для восстановления моторики руки после инсульта: рандомизированное контролируемое исследование. Clin Rehabil 2008, 22 (12):1071-1082. [http://dx.doi.org/10.1177/02608095358] [] 10.1177/02608095358
PubMed Статья Google Scholar
Ju MS, Lin CCK, Lin DH, Hwang IS, Chen SM: Реабилитационный робот с гибридным нечетким контроллером силы и положения: гибридное нечеткое управление реабилитационным роботом. IEEE Trans Neural Syst Rehabil Eng 2005, 13 (3):349-358. [http://dx.doi.org/10.1109/TNSRE.2005.847354] [] 10. 1109/TNSRE.2005.847354
1109/TNSRE.2005.847354
PubMed Статья Google Scholar
Кигути К., Рахман М.Х., Сасаки М., Терамото К.: Разработка мобильного робота-экзоскелета 3DOF для помощи при движении верхних конечностей человека. Робототехника и автономные системы 2008, 56 (8):678-691.[http://www.sciencedirect.com/science/article/B6V16-4R8MDRP-1/2/7d307e7bbef3e5958a6960e3da652723] [] 10.1016/j.robot.2007.11.007
Статья Google Scholar
Росати Г., Галлина П., Масиеро С., Росси А.: Дизайн нового 5-степени степеней свободы. проводной робот для реабилитации. В Proc. 9-я Международная конференция по реабилитационной робототехнике ICORR . Чикаго, Иллинойс; 2005:430-433.
Google Scholar
Colombo R, Sterpi I, Mazzone A, Delconte C, Minuco G, Pisano F: Измерение изменений динамики движения во время роботизированной нейрореабилитации пациентов, перенесших инсульт. IEEE Trans Neural Syst Rehabil Eng 2010, 18: 75-85. [http://dx.doi.org/10.1109/TNSRE.2009.2028831] []
IEEE Trans Neural Syst Rehabil Eng 2010, 18: 75-85. [http://dx.doi.org/10.1109/TNSRE.2009.2028831] []
PubMed Статья Google Scholar
Лум П.С., Бургар С.Г., Шор П.С., Маймундар М., дер Лоос М.В.: Роботизированная двигательная тренировка по сравнению с традиционными методами терапии для восстановления двигательной функции верхних конечностей после инсульта. Arch Phys Med Rehabil 2002, 83 (7):952-959.10.1053/apmr.2001.33101
PubMed Статья Google Scholar
Лум П.С., Бургар К.Г., дер Лоос М.В., Шор П.С., Маймундар М., Яп Р.: Роботизированное устройство MIME для нейрореабилитации верхних конечностей у пациентов с подострым инсультом: последующее исследование. J Rehabil Res Dev 2006, 43 (5):631-642. 10.1682/JRRD.2005.02.0044
PubMed Статья Google Scholar
Люм П.С., Бургар К.Г., Шор П.С.: Доказательства улучшения паттернов мышечной активации после переобучения тянущимся движениям с помощью роботизированной системы MIME у субъектов с постинсультным гемипарезом. IEEE Trans Neural Syst Rehabil Eng 2004, 12 (2):186-194. [http://dx.doi.org/10.1109/TNSRE.2004.827225] [] 10.1109/TNSRE.2004.827225
PubMed Статья Google Scholar
Мубарак С., Фам М., Пайдла Т., Редарс Т.: Результаты проектирования экзоскелета верхней конечности. В Proc. 4-я Европейская конференция Международной федерации медицинской и биологической инженерии .Антверпен, Бельгия; 2008.
Google Scholar
Masiero S, Celia A, Rosati G, Armani M: Роботизированная реабилитация верхней конечности после острого инсульта. Arch Phys Med Rehabil 2007, 88 (2):142-149./image-56a72b0b3df78cf77292f482.jpg) [http://dx.doi.org/10.1016/j.apmr.2006.10.032] [] 10.1016/j.apmr.2006.10.032
[http://dx.doi.org/10.1016/j.apmr.2006.10.032] [] 10.1016/j.apmr.2006.10.032
PubMed Статья Google Scholar
Masiero S, Armani M, Rosati G: Роботизированная терапия верхних конечностей в реабилитации пациентов с острым инсультом: целенаправленный обзор и результаты нового рандомизированного контролируемого исследования. J Rehabil Res Dev 2011, 48 (4):355-366. 10.1682/JRRD.2010.04.0063
PubMed Статья Google Scholar
Fazekas G, Horvath M, Troznai T, Toth A: Роботизированная физиотерапия верхних конечностей для пациентов со спастическим гемипарезом: предварительное исследование. J Rehabil Med 2007, 39 (7):580-582. [http://www.ingentaconnect.com/content/mjl/sreh/2007/00000039/00000007/art00013] [] 10.2340/16501977-0087
ПабМед Статья Google Scholar
 «>
«>Hesse S, Schulte-Tigges G, Konrad M, Bardeleben A, Werner C: Робот-тренажер для пассивной и активной тренировки двусторонних движений предплечья и запястья у пациентов с гемипарезом. Arch Phys Med Rehabil 2003, 84 (6):915-920. 10.1016/S0003-9993(02)04954-7
PubMed Статья Google Scholar
Hesse S, Werner C, Pohl M, Rueckriem S, Mehrholz J, Lingnau ML: Компьютеризированная тренировка рук улучшает двигательный контроль сильно пораженной руки после инсульта: одностороннее слепое рандомизированное исследование в двух центрах. Ход 2005, 36 (9):1960-1966. [http://dx.doi.org/10.1161/01.STR.0000177865.37334.ce] [] 10.1161/01.STR.0000177865.37334.ce
CAS пабмед Статья Google Scholar
Allington J, Spencer SJ, Klein J, Buell M, Reinkensmeyer DJ, Bobrow J: Supinator Extender (SUE): робот с пневматическим приводом для реабилитации предплечья/запястья после инсульта. Conf Proc IEEE Eng Med Biol Soc 2011, 2011: 1579-1582.[http://dx.doi.org/10.1109/IEMBS.2011.60
Conf Proc IEEE Eng Med Biol Soc 2011, 2011: 1579-1582.[http://dx.doi.org/10.1109/IEMBS.2011.60
] []
PubMed Google Scholar
Cordo P, Lutsep H, Cordo L, Wright WG, Cacciatore T, Skoss R: Вспомогательное движение с усиленной чувствительностью (AMES): сочетание двигательных и сенсорных функций для устранения двигательных нарушений у пациентов с хроническим инсультом. Neurorehabil Neural Repair 2009, 23: 67-77. [http://dx.doi.org/10.1177/1545968308317437] []
PubMed Статья Google Scholar
Koeneman EJ, Schultz RS, Wolf SL, Herring DE, Koeneman JB: Устройство для терапии пневматических мышц рук. Conf Proc IEEE Eng Med Biol Soc 2004, 4: 2711-2713. [http://dx.doi.org/10.1109/IEMBS.2004.1403777] []
CAS пабмед Google Scholar
 «>
«>Катнер Н.Г., Чжан Р., Батлер А.Дж., Вольф С.Л., Альбертс Д.Л.: Изменение качества жизни, связанное с роботизированной терапией для улучшения двигательной функции рук у пациентов с подострым инсультом: рандомизированное клиническое исследование. Phys Ther 2010, 90 (4):493-504.[http://dx.doi.org/10.2522/ptj.200
] [] 10.2522/ptj.200PubMed ПабМед Центральный Статья Google Scholar
Rosenstein L, Ridgel AL, Thota A, Samame B, Alberts JL: Влияние комбинированной роботизированной терапии и практики повторяющихся задач на функцию верхних конечностей у пациента с хроническим инсультом. Am J Occup Ther 2008, 62: 28-35. 10.5014/ajot.62.1.28
PubMed Статья Google Scholar
Frick EM, Alberts JL: Комбинированное использование повторяющихся задач и вспомогательного роботизированного устройства у пациента с подострым инсультом. Phys Ther 2006, 86 (10):1378-1386. [http://dx.doi.org/10.2522/ptj.20050149] [] 10.2522/ptj.20050149
Phys Ther 2006, 86 (10):1378-1386. [http://dx.doi.org/10.2522/ptj.20050149] [] 10.2522/ptj.20050149
PubMed Статья Google Scholar
Джонсон М., Виснески К., Андерсон Дж., Натан Д., Смит Р.: Разработка ADLER: Робот для ежедневных упражнений. In 1st IEEE/RAS-EMBS Int. конф. Биомедицинская робототехника и биомехатроника, BioRob . Пиза, Италия; 2006: 881-886.
Google Scholar
Wisneski KJ, Johnson MJ: Количественная оценка кинематики целенаправленных движений реальных, воображаемых или отсутствующих функциональных объектов: значение для моделирования траекторий для роботизированных задач ADL. J Neuroeng Rehabil 2007, 4: 7. [http://dx.doi.org/10.1186/1743-0003-4-7] []
PubMed ПабМед Центральный Статья Google Scholar
 «>
«>Pignolo L, Dolce G, Basta G, Lucca LF, Serra S, Sannita WG: Реабилитация верхних конечностей после инсульта: ARAMIS — инновационный «робомехатронный» подход и прототип. In 4th IEEE RAS & EMBS Int. конф. Биомедицинская робототехника и биомехатроника (BioRob) . Рим, Италия; 2012:1410-1414. [http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=62] []
Google Scholar
Coote S, Murphy B, Harwin W, Stokes E: Влияние системы роботизированной терапии GENTLE/s на функцию руки после инсульта. Clin Rehabil 2008, 22 (5):395-405. [http://дх.doi.org/10.1177/02607085060] [] 10.1177/02607085060
PubMed Статья Google Scholar
Culmer PR, Jackson AE, Makower SG, Cozens JA, Levesley MC, Mon-Williams M, Bhakta B: Новая роботизированная система для количественной оценки кинематики и кинетики рук: описание и оценка в пост-позиции пассивных движений рук с помощью терапевта -Инсульт. J Neurosci Methods 2011, 197 (2):259-269. [http://дх.doi.org/10.1016/j.jneumeth.2011.03.004] [] 10.1016/j.jneumeth.2011.03.004
J Neurosci Methods 2011, 197 (2):259-269. [http://дх.doi.org/10.1016/j.jneumeth.2011.03.004] [] 10.1016/j.jneumeth.2011.03.004
CAS пабмед Статья Google Scholar
Kiguchi K, Kose Y, Hayashi Y: Ориентированная на задачу вспомогательная система восприятия для робота-экзоскелета с силовой поддержкой верхних конечностей. В Proc. Всемирный конгресс по автоматизации (WAC) . Кобе, Япония; 2010:1-6. [http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5665314] []
Google Scholar
Frisoli A, Bergamasco M, Borelli L, Montagner A, Greco G, Procopio C, Carboncini M, Rossi B: Роботизированная реабилитация в виртуальной реальности с L-EXOS. В Proc. 7-го ICDVRAT с ArtAbilitation . Майя, Португалия; 2008: 253-260.
Google Scholar
 «>
«>Кариньян С., Танг Дж., Родерик С., Нейлор М.: Конфигурационно-пространственный подход к управлению реабилитационным экзоскелетом руки. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике ICORR . Нордвейк, Нидерланды; 2007: 179-187.
Google Scholar
Fluet GG, Qiu Q, Saleh S, Ramirez D, Adamovich S, Kelly D, Parikh H: Система роботизированной виртуальной реабилитации (NJIT-RAVR) для детей с гемиплегией верхних конечностей. В Международная конференция по виртуальной реабилитации . Хайфа, Израиль; 2009: 189-192.
Глава Google Scholar
Wolbrecht ET, Chan V, Reinkensmeyer DJ, Bobrow JE: Оптимизация роботизированной помощи на основе моделей для нейрореабилитации. IEEE Trans Neural Syst Rehabil Eng 2008, 16 (3): 286-297. [http://dx.doi. org/10.1109/TNSRE.2008.9] []
org/10.1109/TNSRE.2008.9] []
PubMed Статья Google Scholar
Housman SJ, Le V, Rahman T, Sanchez RJ, Reinkensmeyer DJ: Тренировка рук с T-WREX после хронического инсульта: предварительные результаты рандомизированного контролируемого исследования. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике ICORR . Нордвейк, Нидерланды; 2007: 562-568.
Google Scholar
Housman SJ, Scott KM, Reinkensmeyer DJ: Рандомизированное контролируемое исследование упражнений для рук с поддержкой силы тяжести и компьютеризированных упражнений для людей с тяжелым гемипарезом. Нейрореабилитация Восстановление нервной системы 2009, 23 (5):505-514. [http://dx.doi.org/10.1177/1545968308331148] [] 10.1177/1545968308331148
Пабмед Статья Google Scholar
 «>
«>Sanchez RJ, Liu J, Rao S, Shah P, Smith R, Rahman T, Cramer SC, Bobrow JE, Reinkensmeyer DJ: Автоматизация тренировки движений рук после тяжелого инсульта: функциональные упражнения с количественной обратной связью в условиях пониженной гравитации окружающая обстановка. IEEE Trans Neural Syst Rehabil Eng 2006, 14 (3):378-389. [http://дх.doi.org/10.1109/TNSRE.2006.881553] []
PubMed Статья Google Scholar
Гупта А., О’Мэлли М.: Дизайн тактильного экзоскелета руки для тренировок и реабилитации. IEEE ASME Trans Mechatronics 2006, 11 (3):280.
Артикул Google Scholar
Lambercy O, Dovat L, Gassert R, Burdet E, Teo CL, Milner T: Тактильная ручка для восстановления функции кисти. IEEE Trans Neural Syst Rehabil Eng 2007, 15 (3):356-366. [http://dx.doi.org/10.1109/TNSRE.2007.
[http://dx.doi.org/10.1109/TNSRE.2007.
3] []
PubMed Статья Google Scholar
Casadio M, Giannoni P, Morasso P, Sanguineti V: Проверка концепции интеграции робототерапии с физиотерапией при лечении пациентов с инсультом. Clin Rehabil 2009, 23 (3):217-228. [http://дх.doi.org/10.1177/02608096759] [] 10.1177/02608096759
PubMed Статья Google Scholar
Карпинелла И., Каттанео Д., Абуаркуб С., Феррарин М.: Роботизированная реабилитация верхних конечностей при рассеянном склерозе: осуществимость и предварительные результаты. J Rehabil Med 2009, 41 (12):966-970. [http://www.ingentaconnect.com/content/mjl/sreh/2009/00000041/00000012/art00004] [] 10.2340/16501977-0401
ПабМед Статья Google Scholar
 «>
«>Casadio M, Sanguineti V, Solaro C, Morasso PG: Тактильный робот раскрывает способность к адаптации людей с рассеянным склерозом. Int J Rob Res 2007, 26 (11-12):1225-1233. 10.1177/0278364
4981Артикул Google Scholar
Vergaro E, Squeri V, Brichetto G, Casadio M, Morasso P, Solaro C, Sanguineti V: Адаптивное обучение роботов для лечения нарушения координации при рассеянном склерозе. J Neuroeng Rehabil 2010, 7: 37. [http://dx.doi.org/10.1186/1743-0003-7-37] []
PubMed ПабМед Центральный Статья Google Scholar
Денев А., Мугамир С., Афилал Л., Зайтун Дж.: Конструкция системы управления робота для реабилитации верхних конечностей с тремя степенями свободы. Программы вычислительных методов Biomed 2008, 89 (2):202-214. [http://dx. doi.org/10.1016/j.cmpb.2007.07.006] [] 10.1016/j.cmpb.2007.07.006
doi.org/10.1016/j.cmpb.2007.07.006] [] 10.1016/j.cmpb.2007.07.006
PubMed Статья Google Scholar
Furuhashi Y, Nagasaki M, Aoki T, Morita Y, Ukai H, Matsui N: Разработка вспомогательного реабилитационного робота для персонализированной реабилитации верхних конечностей. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 787-792.
Google Scholar
Матхай А., Цю Q: Включение тактильных эффектов в трехмерную виртуальную среду для тренировки гемипаретической верхней конечности .2009. [http://dx.doi.org/10.1109/TNSRE.2009.2028830] []
Google Scholar
Одзава Т., Кикучи Т., Фукусима К., Акаи Х., Фукуда Т., Танида С., Фуджикава Т., Кано С., Фурушо Дж.: Первоначальные клинические испытания для оценки моделей синергии движений пациентов, перенесших инсульт, с использованием системы PLEMO с сенсорным захватом устройство. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 873-878.
В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 873-878.
Google Scholar
Чжан Х., Баласубраманиан С., Вей Р., Остин Х., Бьюкенен С., Герман Р., Хе Дж.: РУПЕРТ. Схема управления замкнутым контуром. Conf Proc IEEE Eng Med Biol Soc 2010, 2010: 3686-3689. [http://dx.doi.org/10.1109/IEMBS.2010.5627647] []
PubMed Google Scholar
Розати Г., Занотто Д., Секоли Р., Росси А.: Разработка и управление двумя планарными роботами с тросовым приводом для нейрореабилитации верхних конечностей. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото, Япония; 2009: 560-565.
Google Scholar
Танака Ю., Исии М., Цудзи Т. , Имамура Н.: Моделирование и оценка двигательных навыков человека в виртуальном теннисном задании. Conf Proc IEEE Eng Med Biol Soc; Ванкувер, Канада 2008, 2008: 4190-4193. [http://dx.doi.org/10.1109/IEMBS.2008.4650133] []
, Имамура Н.: Моделирование и оценка двигательных навыков человека в виртуальном теннисном задании. Conf Proc IEEE Eng Med Biol Soc; Ванкувер, Канада 2008, 2008: 4190-4193. [http://dx.doi.org/10.1109/IEMBS.2008.4650133] []
Google Scholar
Xiu-Feng Z, Lin-Hong J, Li-Yun G: Новый нейрореабилитационный робот для движений верхних конечностей. Conf Proc IEEE Eng Med Biol Soc; Шанхай, Китай 2005, 5: 5040-5043. [http://dx.doi.org/10.1109/IEMBS.2005.1615608] []
Google Scholar
Неф Т., Гуидали М., Кламрот-Марганска В., Ринер Р.: ARMin — робот-экзоскелет для реабилитации после инсульта. В Всемирный конгресс по медицинской физике и биомедицинской инженерии, 7–12 сентября . Под редакцией: Dössel O, Schlegel WC. Мюнхен, Германия: Springer; 2009: 127-130.
Google Scholar
 «>
«>Nef T, Quinter G, Müller R, Riener R: Эффекты тренировки рук с роботизированным устройством ARMin I при хроническом инсульте: три отдельных случая. Neurodegener Dis 2009, 6 (5-6):240-251. [http://dx.doi.org/10.1159/000262444] [] 10.1159/000262444
PubMed Статья Google Scholar
Staubli P, Nef T, Klamroth-Marganska V, Riener R: Эффекты интенсивной тренировки рук с помощью реабилитационного робота ARMin II у пациентов с хроническим инсультом: четыре единичных случая. J Neuroeng Rehabil 2009, 6: 46. [http://dx.doi.org/10.1186/1743-0003-6-46] []
PubMed ПабМед Центральный Статья Google Scholar
Gijbels D, Lamers I, Kerkhofs L, Alders G, Knippenberg E, Feys P: Armeo Spring как тренировочный инструмент для улучшения функциональности верхних конечностей при рассеянном склерозе: экспериментальное исследование. J Neuroeng Rehabil 2011, 8: 5. [http://dx.doi.org/10.1186/1743-0003-8-5] []
J Neuroeng Rehabil 2011, 8: 5. [http://dx.doi.org/10.1186/1743-0003-8-5] []
PubMed ПабМед Центральный Статья Google Scholar
Loureiro RCV, Lamperd B, Collin C, Harwin WS: Терапия «дотянись и схвати»: эффекты системы Gentle/G для оценки реабилитации всей руки после подострого инсульта. В Proc. Международная конференция IEEE по реабилитационной робототехнике ICORR . Киото; 2009: 755-760.
Google Scholar
Боволента Ф., Сале П., Далл’Арми В., Клеричи П., Франческини М.: Роботизированная терапия верхних конечностей у пациентов с поражениями, связанными с инсультом.Краткий отчет о клиническом опыте. J Neuroeng Rehabil 2011, 8: 18.
PubMed ПабМед Центральный Статья Google Scholar
 «>
«>Treger I, Faran S, Ring H: Роботизированная терапия для нейромышечной тренировки пациентов с подострым инсультом. ТЭО. Eur J Phys Rehabil Med 2008, 44 (4):431-435.
КАС пабмед Google Scholar
Perry JC, Rosen J, Burns S: Конструкция экзоскелета с питанием от верхних конечностей. Мехатроника, IEEE/ASME Trans 2007, 12 (4):408-417.
Артикул Google Scholar
Хасэгава Ю., Миками Ю., Ватанабэ К., Санкай Ю.: Пятипалая вспомогательная рука с механическим соответствием человеческому пальцу. В IEEE Int. конф. Робототехника и автоматизация (ICRA) . Пасадена, Калифорния; 2008: 718-724.
Google Scholar
Rocon E, Belda-Lois JM, Ruiz AF, Manto M, Moreno JC, Pons JL: Разработка и проверка реабилитационного роботизированного экзоскелета для оценки и подавления тремора. IEEE Trans Neural Syst Rehabil Eng 2007, 15 (3):367-378. [http://dx.doi.org/10.1109/TNSRE.2007.
IEEE Trans Neural Syst Rehabil Eng 2007, 15 (3):367-378. [http://dx.doi.org/10.1109/TNSRE.2007.
7] []
CAS пабмед Статья Google Scholar
Loureiro RCV, Belda-Lois JM, Lima ER, Pons JL, Sanchez-Lacuesta JJ, Harwin WS: Подавление тремора верхних конечностей при ADL с помощью ортеза, включающего управляемый привод с двойным вязкостным лучом. В Proc. 9-й междунар. конф.по реабилитационной робототехнике ICORR . Чикаго, Иллинойс; 2005: 119-122.
Google Scholar
Педрокки А., Ферранте С., Амброзини Э., Гандолла М., Казеллато С., Шауэр Т., Клауэр С., Паскуаль Дж., Видаурре С., Гфелер М., Райхенфельзер В., Карнер Дж., Микера С., Крема А., Молтени Ф., Россини M, Palumbo G, Guanziroli E, Jedlitschka A, Hack M, Bulgheroni M, D Amico E, Schenk P, Zwicker S, Duschau-Wicke A, Miseikis J, Graber L, Ferrigno G: Проект MUNDUS: Мультимодальный нейропротез для ежедневного использования поддержка конечностей. J Neuroeng Rehabil 2013, 10: 66. [http://dx.doi.org/10.1186/1743-0003-10-66] []
J Neuroeng Rehabil 2013, 10: 66. [http://dx.doi.org/10.1186/1743-0003-10-66] []
PubMed ПабМед Центральный Статья Google Scholar
Dijkers MP, deBear PC, Erlandson RF, Kristy K, Geer DM, Nichols A: Принятие пациентами и персоналом роботизированных технологий в трудотерапии: экспериментальное исследование. J Rehabil Res Dev 1991, 28 (2):33-44. 10.1682/JRRD.1991.04.0033
КАС пабмед Статья Google Scholar
Доннан Г.А., Фишер М., Маклеод М., Дэвис С.М.: Инсульт. Ланцет 2008, 371 (9624):1612-1623. -7] [http://dx.doi.org/10.1016/S0140-6736(08)60694 [-7] 10.1016/S0140-6736(08)60694-7
CAS пабмед Статья Google Scholar
Oda K, Isozumi S, Ohyama Y, Tamida K, Kikuchi T, Furusho J: Разработка изокинетического и изосократительного тренажера MEM-MRB с использованием тормоза MR. В Proc. Международный IEEE. конф. по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009:6-11.
В Proc. Международный IEEE. конф. по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009:6-11.
Google Scholar
Kikuchi T, Xinghao H, Fukushima K, Oda K, Furusho J, Inoue A: Система реабилитации Quasi-3-DOF для верхних конечностей: механизм силовой обратной связи и программное обеспечение для реабилитации. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 24-27.
Google Scholar
Sanchez R, Reinkensmeyer D, Shah P, Liu J, Rao S, Smith R, Cramer S, Rahman T, Bobrow J: Мониторинг функциональных движений рук для домашней терапии после инсульта. Conf Proc IEEE Eng Med Biol Soc; Сан-Франциско, Калифорния 2004, 7: 4787-4790. [http://dx.doi.org/10.1109/IEMBS.2004.1404325] []
CAS Google Scholar
 «>
«>Кребс Х.И., Хоган Н., Айсен М.Л., Вольпе Б.Т.: Роботизированная нейрореабилитация. IEEE Trans Rehabil Eng 1998, 6: 75-87. 10.1109/86.662623
КАС пабмед ПабМед Центральный Статья Google Scholar
Schoone M, van Os P, Campagne A: Роботизированная активная реабилитация (ACRE) Пробная версия для пользователей. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 477-481.
Google Scholar
Spencer SJ, Klein J, Minakata K, Le V, Bobrow JE, Reinkensmeyer DJ: Недорогой параллельный робот и метод оптимизации траектории для реабилитации запястья и предплечья с использованием Wii. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008: 869-874.
Скоттсдейл, Аризона; 2008: 869-874.
Google Scholar
Takaiwa M, Noritsugu T: Разработка оборудования для реабилитации запястья с использованием пневматического параллельного манипулятора. В Proc. Международная конференция IEEE по робототехнике и автоматизации (ICRA) . Барселона, Испания; 2005:2302-2307. [http://дх.doi.org/10.1109/РОБОТ.2005.1570456] []
Google Scholar
Розати Г., Галлина П., Масьеро С.: Разработка, внедрение и клинические испытания проводного робота для нейрореабилитации. IEEE Trans Neural Syst Rehabil Eng 2007, 15 (4):560-569. [http://dx.doi.org/10.1109/TNSRE.2007.0] []
PubMed Статья Google Scholar
Beer RF, Naujokas C, Bachrach B, Mayhew D: Разработка и оценка тренировочной среды с компенсацией гравитации для роботизированной реабилитации после инсульта. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008: 205-210.
В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008: 205-210.
Google Scholar
Dovat L, Lambercy O, Gassert R, Maeder T, Milner T, Leong TC, Burdet E: HandCARE: тросовая реабилитационная система для тренировки работы рук после инсульта. IEEE Trans Neural Syst Rehabil Eng 2008, 16 (6): 582-591.[http://dx.doi.org/10.1109/TNSRE.2008.2010347] []
PubMed Статья Google Scholar
Кигути К., Ивами К., Ясуда М., Ватанабэ К., Фукуда Т.: Экзоскелетный робот для помощи при движении плечевого сустава человека. Мехатроника, транзакции IEEE/ASME по 2003, 8: 125-135. 10.1109/ТМЕЧ.2003.809168
Артикул Google Scholar
 «>
«>Schiele A, van der Helm FCT: Кинематическая конструкция для улучшения эргономики при взаимодействии человека с машиной. IEEE Trans Neural Syst Rehabil Eng 2006, 14 (4):456-469. [http://dx.doi.org/10.1109/TNSRE.2006.881565] []
PubMed Статья Google Scholar
Ren Y, Park HS, Zhang LQ: Разработка робота-экзоскелета с целой рукой и механизмом открывания и закрывания рук для реабилитации после инсульта верхних конечностей. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) .Киото, Япония; 2009: 761-765.
Google Scholar
Fleischer C, Kondak K, Wege A, Kossyk I: Исследование экзоскелетов в Техническом университете Берлина. In Proceedings of German Workshop on Robotics, 9-10 июня . Брауншвейг, Германия; 2009. [http://www.gwr09. org/download/paper/gwr09_0043.pdf] []
org/download/paper/gwr09_0043.pdf] []
Google Scholar
Кляйн Дж., Спенсер С., Аллингтон Дж., Бобров Дж.Е., Рейнкенсмейер Д.Дж.: Оптимизация параллельного плечевого механизма для создания мощного, маломассивного экзоскелета роботизированной руки. Robotics, IEEE Trans 2010, 26 (4):710-715.
Артикул Google Scholar
Гупта А., О’Мэлли М., Патоглу В., Бургар С.: Дизайн, управление и характеристики RiceWrist: экзоскелет запястья с силовой обратной связью для реабилитации и тренировок. Int J Robot Res 2008, 27 (2):233. 10.1177/0278364
4261Артикул Google Scholar
Burgar CG, Lum PS, Shor PC, der Loos HFMV: Разработка роботов для реабилитационной терапии: опыт Palo Alto VA/Stanford. J Rehabil Res Dev 2000, 37 (6):663-673. [http://www.rehab.research.va.gov/jour/00/37/6/pdf/burgar.pdf] []
J Rehabil Res Dev 2000, 37 (6):663-673. [http://www.rehab.research.va.gov/jour/00/37/6/pdf/burgar.pdf] []
CAS пабмед Google Scholar
Amirabdollahian F, Loureiro R, Gradwell E, Collin C, Harwin W, Johnson G: Многомерный анализ критериев исхода Fugl-Meyer для оценки эффективности роботизированной терапии инсульта GENTLE/S. J Neuroeng Rehabil 2007, 4: 4.[http://dx.doi.org/10.1186/1743-0003-4-4] []
PubMed ПабМед Центральный Статья Google Scholar
Van Der Linde R, Lammertse P: HapticMaster — универсальный робот с силовым управлением для взаимодействия с человеком. Промышленный робот: Int J 2003, 30 (6):515-524. 10.1108/01439
Артикул Google Scholar
 «>
«>Loureiro RCV, Harwin WS: Reach & Grasp Therapy: Дизайн и управление роботизированной системой нейрореабилитации с 9 степенями свободы. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 757-763.
Google Scholar
Mihelj M, Podobnik J, Munih M: HEnRiE — Тактильная среда для упражнений по дотягиванию и хватанию. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008:907-912.
Google Scholar
Toth A, Fazekas G, Arz G, Jurak M, Horvath M, Пассивная роботизированная двигательная терапия спастической гемипаретической руки с REHAROB: отчет о первом клиническом испытании и последующем улучшении системы. В Proc. 9-я Международная конференция по реабилитационной робототехнике (ICORR) . Чикаго, Иллинойс; 2005: 127-130.
Чикаго, Иллинойс; 2005: 127-130.
Google Scholar
Culmer PR, Jackson AE, Makower S, Richardson R, Cozens JA, Levesley MC, Bhakta BB: Стратегия управления роботизированной реабилитацией верхних конечностей с помощью двойной роботизированной системы. Мехатроника, IEEE/ASME Trans 2009, PP (99):1-11.
Google Scholar
Моралес Р., Бадеса Ф.Дж., Гарсия-Арасил Н., Сабатер Дж.М., Перес-Видаль К.: Пневматические роботизированные системы для реабилитации верхних конечностей. Med Biol Eng Comput 2011, 49 (10):1145-1156. [http://dx.doi.org/10.1007/s11517-011-0814-3] [] 10.1007/s11517-011-0814-3
PubMed Статья Google Scholar
Houtsma JA, Houten FJAMV: Виртуальная реальность и тактильная система «ведущий-ведомый» в постинсультной реабилитации верхних конечностей. Proc Inst Mech Eng H 2006, 220 (6):715-718. 10.1243/09544119Х06104
Proc Inst Mech Eng H 2006, 220 (6):715-718. 10.1243/09544119Х06104
КАС пабмед Статья Google Scholar
Selzer M, Clarke S, Cohen L, Duncan P, Gage F (Eds): Реабилитационная робототехника, ортопедия и протезирование.В учебнике по восстановлению и реабилитации нервной системы . Издательство Кембриджского университета; 2006.
Google Scholar
Takahashi CD, Der-Yeghiaian L, Le V, Motiwala RR, Cramer SC: Роботизированная ручная моторная терапия после инсульта. Мозг 2008, 131 (часть 2):425-437. [http://dx.doi.org/10.1093/brain/awm311] []
PubMed Статья Google Scholar
Vertechy R, Frisoli A, Dettori A, Solazzi M, Bergamasco M: Разработка нового экзоскелета для реабилитации верхних конечностей. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 188-193.
В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 188-193.
Google Scholar
Micera S, Carrozza M, Guglielmelli E, Cappiello G, Zaccone F, Freschi C, Colombo R, Mazzone A, Delconte C, Pisano F, et al .: Простая роботизированная система для нейрореабилитации. Автономные роботы 2005, 19 (3):271-284. 10.1007/s10514-005-4749-0
Артикул Google Scholar
Кребс Х., Ферраро М., Бюргер С., Ньюбери М., Макияма А., Сандманн М., Линч Д., Вольпе Б., Хоган Н.: Реабилитационная робототехника: пилотное испытание пространственного расширения для MIT-Manus. J Neuroeng Rehabil 2004, 1: 5. [http://dx.doi.org/10.1186/1743-0003-1-5] []
PubMed ПабМед Центральный Статья Google Scholar
 «>
«>Casadio M, Sanguineti V, Morasso PG, Arrichiello V: Braccio di Ferro: новая тактильная рабочая станция для нейромоторной реабилитации. Technol Health Care 2006, 14 (3):123-142.
ПабМед Google Scholar
Кикути Т., Одзава Т., Акаи Х., Фурушо Дж.: «Гибрид-ПЛЕМО», реабилитационная система для верхних конечностей с активной/пассивной силовой обратной связью и ее применение для техник фасилитации. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 781-786.
Google Scholar
Reinkensmeyer DJ, Kahn LE, Averbuch M, McKenna-Cole A, Schmit BD, Rymer WZ: Понимание и лечение нарушения движения рук после хронической черепно-мозговой травмы: прогресс с руководством ARM. J Rehabil Res Dev 2000, 37 (6):653-662.
КАС пабмед Google Scholar
Lum P, Reinkensmeyer D, Mahoney R, Rymer WZ, Burgar C: Роботизированные устройства для двигательной терапии после инсульта: текущий статус и проблемы клинического принятия. Top Stroke Rehabil 2002, 8 (4):40-53. 10.1310/9KFM-KF81-P9A4-5WW0
PubMed Статья Google Scholar
Krebs HI, Volpe BT, Williams D, Celestino J, Charles SK, Lynch D, Hogan N: Роботизированная нейрореабилитация: робот для реабилитации запястья. IEEE Trans Neural Syst Rehabil Eng 2007, 15 (3):327-335. [http://dx.doi.org/10.1109/TNSRE.2007.
PubMed ПабМед Центральный Статья Google Scholar
Облак Дж., Цикайло И., Матьячич З.: Универсальный тактильный привод: робот для реабилитации рук и запястий. IEEE Trans Neural Syst Rehabil Eng 2009. [http://dx.doi.org/10.1109/TNSRE.2009.2034162] []
IEEE Trans Neural Syst Rehabil Eng 2009. [http://dx.doi.org/10.1109/TNSRE.2009.2034162] []
Google Scholar
Колдуэлл, округ Колумбия, Цагаракис N: «Мягкие» экзоскелеты для реабилитации верхней и нижней части тела – проектирование, контроль и испытания. Int J Робот-гуманоид 2007, 4: 1-24. 10.1142/S0219843607000947
Артикул Google Scholar
Pratt GA, Williamson MM: Эластичные приводы серии . In Intelligent Robots and Systems 95. «Взаимодействие человека с роботом и кооперативные роботы», Proceedings. 1995 Международная конференция IEEE/RSJ по . Питтсбург, Пенсильвания; 1995:399-406.
Глава Google Scholar
Зульцер Дж.С., Пешкин М.А., Паттон Дж.Л.: Дизайн мобильного недорогого устройства для реабилитации верхних конечностей в домашних условиях. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) .Нордвейк, Нидерланды; 2007: 933-937.
В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) .Нордвейк, Нидерланды; 2007: 933-937.
Google Scholar
Вандернипен И., Ван Хам Р., Ван Дамм М., Верслуйс Р., Лефебер Д.: Ортопедическая реабилитация: локтевой ортез с электроприводом, использующий податливую активацию. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 172-177.
Google Scholar
Розати Г., Ченчи С., Боскетти Г., Занотто Д., Масьеро С.: Дизайн ортеза для активной руки с одной диафрагмой для нейрореабилитации. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 161-166.
Google Scholar
Wolbrecht ET, Leavitt J, Reinkensmeyer DJ, Bobrow JE: Управление пневматическим ортезом для реабилитации после инсульта верхней конечности. Conf Proc IEEE Eng Med Biol Soc; Нью-Йорк, NY 2006, 1: 2687-2693. [http://dx.doi.org/10.1109/IEMBS.2006.259941] []
Conf Proc IEEE Eng Med Biol Soc; Нью-Йорк, NY 2006, 1: 2687-2693. [http://dx.doi.org/10.1109/IEMBS.2006.259941] []
Google Scholar
Сасаки Д., Норицугу Т., Такайва М.: Разработка активной поддерживающей шины, приводимой в действие пневматическим мягким приводом (ASSIST). В Proc. Международная конференция IEEE по робототехнике и автоматизации (ICRA) . Барселона, Испания; 2005: 520-525.
Google Scholar
Lucas L, DiCicco M, Matsuoka Y: Экзоскелет руки с ЭМГ для естественного зажима. J Robot Mechatronics 2004, 16: 482-488.
Артикул Google Scholar
Цагаракис Н., Колдуэлл Д.: Разработка и контроль «мягкого» экзоскелета для использования в физиотерапии и тренировках. Автономные роботы 2003, 15: 21-33. 10.1023/A:1024484615192
10.1023/A:1024484615192
Артикул Google Scholar
Кобаяси Х, Нодзаки Х: Разработка мускулистого костюма для поддержки рабочего. In Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) . Сан-Диего, Калифорния; 2007:1769-1774.
Google Scholar
Чоу С.П., Ханнафорд Б.: Измерение и моделирование пневматических искусственных мышц McKibben. IEEE Trans Robot Automation 1996, 12: 90-102. 10.1109/70.481753
Артикул Google Scholar
Balasubramanian S, Wei R, Perez M, Shepard B, Koeneman E, Koeneman J, He J: РУПЕРТ: Робот-экзоскелет для восстановления функций руки. В Proc. Виртуальная реабилитация . Ванкувер, Канада; 2008: 163-167. [http://dx.doi.org/10.1109/ICVR. 2008.4625154] []
2008.4625154] []
Google Scholar
Umemura A, Saito Y, Fujisaki K: Исследование реабилитационных роботов-манипуляторов с электроприводом, управляемых пациентом с инвалидностью верхних конечностей. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 451-456.
Google Scholar
Пилатюк С., Каргов А., Гайзер И., Вернер Т., Шульц С., Бреттауэр Г.: Разработка гибкой гидравлической приводной системы для гибридного локтевого ортеза. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 167-171.
Google Scholar
Stienen A, Hekman E, Prange G, Jannink M, Aalsma A, van der Helm F, van der Kooij H: Dampace: Дизайн экзоскелета для тренировки координации усилий при реабилитации верхних конечностей. J Med Devices 2009, 3: 031003. 10.1115/1.31
J Med Devices 2009, 3: 031003. 10.1115/1.31
Артикул Google Scholar
Stienen AHA, Hekman EEG, ter Braak H, Aalsma AMM, van der Helm FCT, van der Kooij H: Конструкция ротационного гидроупругого привода для активного экзоскелета для реабилитации верхних конечностей. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) .Скоттсдейл, Аризона; 2008: 881-888.
Google Scholar
Шерер Р., Прадхан С., Деллон Б., Ким Д., Клацки Р., Мацуока Ю.: Характеристика поворотного движения несколькими пальцами в направлении роботизированной реабилитации. В Proc. Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Киото, Япония; 2009: 812-817.
Google Scholar
 «>
«>Winter SH, Bouzit M: Использование магнитореологической жидкости в перчатке с силовой обратной связью. IEEE Trans Neural Syst Rehabil Eng 2007, 15: 2-8. [http://dx.doi.org/10.1109/TNSRE.2007.8
] []
PubMed Статья Google Scholar
Khanicheh A, Mintzopoulos D, Weinberg B, Tzika AA, Mavroidis C: MR_CHIROD v.2: совместимое с магнитным резонансом умное устройство для реабилитации рук для визуализации мозга. Neural Syst Rehabil Eng IEEE Trans 2008, 16: 91-98.
Артикул Google Scholar
Furusho J, Koyanagi K, Imada Y, Fujii Y, Nakanishi K, Domen K, Miyakoshi K, Ryu U, Takenaka S, Inoue A: Трехмерная реабилитационная система для верхних конечностей, разработанная в год проекта НЕДО и его клинических испытаний . Чикаго, Иллинойс; 2005: 53-56.
Google Scholar
Furusho J, Kikuchi T, Oda K, Ohyama Y, Morita T, Shichi N, Jin Y, Inoue A: Система реабилитационной поддержки верхних конечностей с 6 степенями свободы, включая запястья «Роботерапевт» с физиотерапией. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007:304-309.
Google Scholar
Хамид С., Хайек Р.: Роль электростимуляции в реабилитации и регенерации после травмы спинного мозга: обзор. Eur Spine J 2008, 17 (9):1256-1269. [http://dx.doi.org/10.1007/s00586-008-0729-3] [] 10.1007/s00586-008-0729-3
PubMed ПабМед Центральный Статья Google Scholar
Takano Y, Haneda Y, Maeda T, Sakai Y, Matsuse H, Kawaguchi T, Tagawa Y, Shiba N: Увеличение мышечной силы и массы бедра у пожилых людей с помощью гибридно-тренировочного метода электростимуляции и волевой сокращение. Tohoku J Exp Med 2010, 221: 77-85. 10.1620/тем.221.77
Tohoku J Exp Med 2010, 221: 77-85. 10.1620/тем.221.77
PubMed Статья Google Scholar
Freeman CT, Hughes AM, Burridge JH, Chappell PH, Lewin PL, Rogers E: Роботизированная рабочая станция для реабилитации после инсульта верхней конечности с использованием FES. Med Eng Phys 2009, 31 (3):364-373. [http://dx.doi.org/10.1016/j.medengphy.2008.05.008] [] 10.1016/j.medengphy.2008.05.008
CAS пабмед Статья Google Scholar
Li R, Hu XL, Tong KY: Комбинированная электромиографическая (ЭМГ) система с функциональной электростимуляцией (ФЭС) для постинсультной реабилитации. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008: 642-646.
Google Scholar
 «>
«>Масия Л., Кребс Х.И., Каппа П., Хоган Н.: Конструкция, характеристики и пределы импеданса ручного робота. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007:1085-1089.
Google Scholar
Gopura RARC, Kiguchi K, Li Y: SUEFUL-7: робот-экзоскелет верхних конечностей с 7 степенями свободы с управлением на основе ЭМГ, ориентированным на модель мышц. In Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) . Сент-Луис, Миссури; 2009:1126-1131.
Google Scholar
Nathan DE, Johnson MJ, McGuire J: Возможность интеграции помощи при захвате FES с ориентированной на задачу роботизированной терапевтической средой: тематическое исследование. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008:807-812.
Скоттсдейл, Аризона; 2008:807-812.
Google Scholar
Johnson GR, Carus DA, Parrini G, Marchese SS, Valeggi R: Конструкция механического ортеза с пятью степенями свободы для верхней конечности. Proc Inst Mech Eng H 2001, 215 (3): 275-284. 10.1243/0954411011535867
КАС пабмед Статья Google Scholar
Rosen J, Brand M, Fuchs MB, Arcan M: Экзоскелетная система с питанием от миосигналов. IEEE Trans Syst, Man and Cybernet, Part A 2001, 31 (3):210-222. 10.1109/3468.
1Артикул Google Scholar
Кигути К., Эсаки Р., Цурута Т., Ватанабэ К., Фукуда Т.: Система экзоскелета для реабилитации подвижности локтевого сустава. В Proc. Международная конференция IEEE/ASME по передовой интеллектуальной мехатронике (AIM) . Порт-Айленд, Япония; 2003:1228-1233. том 2.
Порт-Айленд, Япония; 2003:1228-1233. том 2.
Google Scholar
Ögce F, Özyalçin H: Пример из практики: миоэлектрически контролируемый плече-локтевой ортез для невосстановленной травмы плечевого сплетения. Ортопедический протез Int 2000, 24 (3):252-255. 10.1080/03093640008726557
ПабМед Статья Google Scholar
Стейн Дж., Нарендран К., МакБин Дж., Кребс К., Хьюз Р.: Электромиографический экзоскелетный ортез для верхних конечностей для тренировок после инсульта. Am J Phys Med Rehabil 2007, 86 (4):255-261. [http://dx.doi.org/10.1097/PHM.0b013e3180383cc5] [] 10.1097/PHM.0b013e3180383cc5
ПабМед Статья Google Scholar
Стейн Дж.: e100 Нейророботизированная система. Expert Rev Med Devices 2009, 6: 15-19. [http://dx.doi.org/10.1586/17434440.6.1.15] [] 10.1586/17434440.6.1.15
[http://dx.doi.org/10.1586/17434440.6.1.15] [] 10.1586/17434440.6.1.15
PubMed Статья Google Scholar
Gopura RAR, Kiguchi K: Робот-экзоскелет, помогающий движению предплечья и запястья человека с нечетким нейроконтролем на основе ЭМГ. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) . Скоттсдейл, Аризона; 2008: 550-555.
Google Scholar
Song R, Tong KY, Hu XL, Zheng XJ: Роботизированная система с миоэлектрическим управлением, которая оказывает добровольную механическую помощь людям после инсульта. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) .Нордвейк, Нидерланды; 2007: 246-249.
Google Scholar
Li Q, Wang D, Du Z, Song Y, Sun L: Управление на основе sEMG для роботизированной системы реабилитации верхних конечностей с 5 степенями свободы. В Proc. Международная конференция IEEE по робототехнике и биомиметике (ROBIO) . Куньмин, Китай; 2006:1305-1310.
В Proc. Международная конференция IEEE по робототехнике и биомиметике (ROBIO) . Куньмин, Китай; 2006:1305-1310.
Google Scholar
Mayr A, Kofler M, Saltuari L: [ARMOR: электромеханический робот для тренировки верхних конечностей после инсульта.Проспективное рандомизированное контролируемое пилотное исследование]. Хандчир Микрочир Пласт Чир 2008, 40: 66-73. [http://dx.doi.org/10.1055/s-2007-989425] [] 10.1055/s-2007-989425
CAS пабмед Статья Google Scholar
Кавасаки Х., Ито С., Ишигуре Ю., Нисимото Ю., Аоки Т., Моури Т., Сакаэда Х., Абэ М.: Разработка робота-помощника движения руки для реабилитационной терапии путем контроля движений пациента. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 234-240.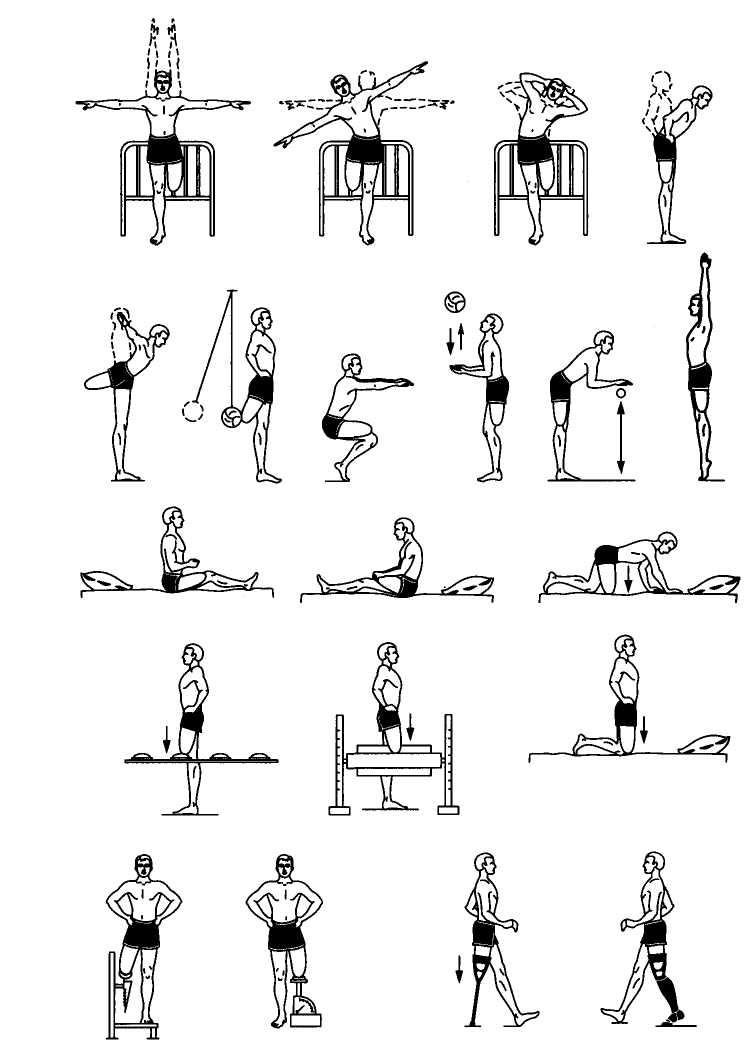
Google Scholar
Дин М., Уэда Дж., Огасавара Т.: Точный контроль мышечной силы с помощью вспомогательного устройства: конфигурация системы и эксперимент. В Proc. 2-я Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике (BioRob) .Скоттсдейл, Аризона; 2008: 181-186.
Google Scholar
Lam P, Hebert D, Boger J, Lacheray H, Gardner D, Apkarian J, Mihailidis A: Тактильно-роботизированная платформа для лечения инсульта с доступом к верхним конечностям: предварительный дизайн и результаты оценки. J Neuroeng Rehabil 2008, 5: 15. [http://dx.doi.org/10.1186/1743-0003-5-15] []
PubMed ПабМед Центральный Статья Google Scholar
Casellato C, Pedrocchi A, Zorzi G, Vernisse L, Ferrigno G, Nardocci N: Визуально-тактильная биологическая обратная связь на основе ЭМГ: инструмент для улучшения моторного контроля у детей с первичной дистонией. IEEE Trans Neural Syst Rehabil Eng 2013, 21 (3):474-480. [http://dx.doi.org/10.1109/TNSRE.2012.2222445] []
IEEE Trans Neural Syst Rehabil Eng 2013, 21 (3):474-480. [http://dx.doi.org/10.1109/TNSRE.2012.2222445] []
PubMed Статья Google Scholar
Takahashi Y, Terada T, Inoue K, Ito Y, Ikeda Y, Lee H, Komeda T: Система тактильных устройств для реабилитации двигательных и когнитивных функций верхних конечностей: сравнение движения хватом между нормальными субъектами и пациентами, перенесшими инсульт. В Proc.10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 736-741.
Google Scholar
Mali U, Munih M: HIFE-тактильный интерфейс для тренировки пальцев. Мехатроника, IEEE/ASME Trans 2006, 11: 93-102.
Артикул Google Scholar
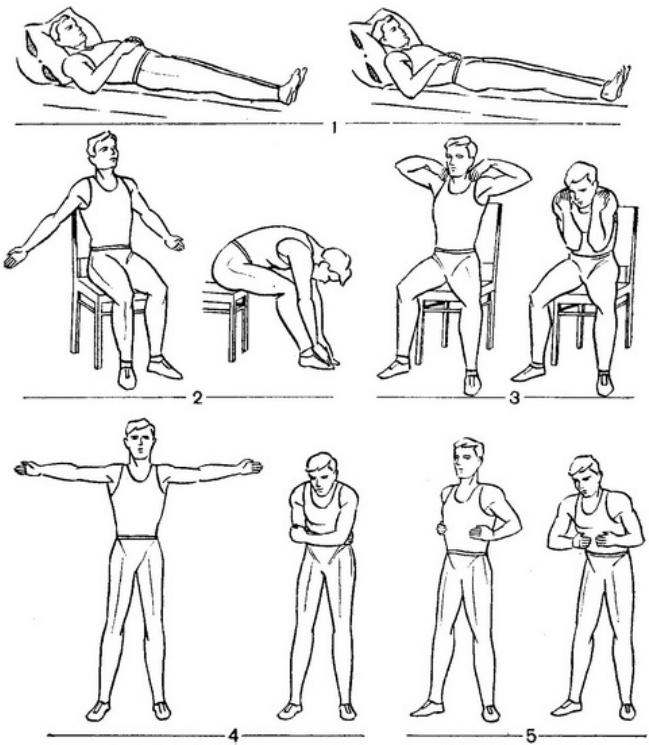 «>
«>Bouzit M, Burdea G, Popescu G, Boian R: Rutgers Master II — новая перчатка с силовой обратной связью. Мехатроника, IEEE/ASME Trans 2002, 7 (2):256-263. 10.1109/ТМЕЧ.2002.1011262
Артикул Google Scholar
Попеску В.Г., Бурдеа Г.К., Бузит М., Хенц В.Р.: Система телереабилитации на основе виртуальной реальности с силовой обратной связью. IEEE Trans Inf Technol Biomed 2000, 4: 45-51. 10.1109/4233.826858
КАС пабмед Статья Google Scholar
Джек Д., Бойан Р., Мерианс А.С., Тремейн М., Бурдеа Г.К., Адамович С.В., Рекче М., Пойзнер Х.: Реабилитация после инсульта с использованием виртуальной реальности. Neural Syst Rehabil Eng, IEEE Trans 2001, 9 (3):308-318. 10.1109/7333.948460
КАС Статья Google Scholar
 «>
«>Адамович С.В., Мерианс А.С., Боян Р., Льюис Дж.А., Тремейн М., Бурдеа Г.С., Рекче М., Пойзнер Х: Система упражнений на основе виртуальной реальности для реабилитации рук после инсульта. Присутствие: Телеоператоры и виртуальная среда 2005, 14 (2):161-174.
Артикул Google Scholar
Брюэр Б.Р., Клацки Р., Мацуока Ю.: Искажение визуальной обратной связи в роботизированной среде для реабилитации рук. Brain Res Bull 2008, 75 (6):804-813. [http://dx.doi.org/10.1016/j.brainresbull.2008.01.006] [] 10.1016/j.brainresbull.2008.01.006
PubMed Статья Google Scholar
Xydas EG, Louca LS: Дизайн и разработка тактильной доски для реабилитации людей с рассеянным склерозом. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 906-916.
Нордвейк, Нидерланды; 2007: 906-916.
Google Scholar
Palsbo SE, Hood-Szivek P: Влияние роботизированных трехмерных повторяющихся движений на улучшение двигательной функции и контроля у детей с нарушениями почерка: нерандомизированное испытание устройства фазы 2. Am J Occup Ther 2012, 66 (6):682-690. [http://dx.doi.org/10.5014/ajot.2012.004556] [] 10.5014/ajot.2012.004556
PubMed Статья Google Scholar
Адамович С., Флюет Г.Г., Мерианс А.С., Матай А., Цю В.: Восстановление функции кисти в виртуальной реальности: тренировка гемипаретической кисти и руки вместе или по отдельности. Conf Proc IEEE Eng Med Biol Soc; Ванкувер, Канада 2008, 2008: 3475-3478. [http://dx.doi.org/10.1109/IEMBS.2008.4649954] []
Google Scholar
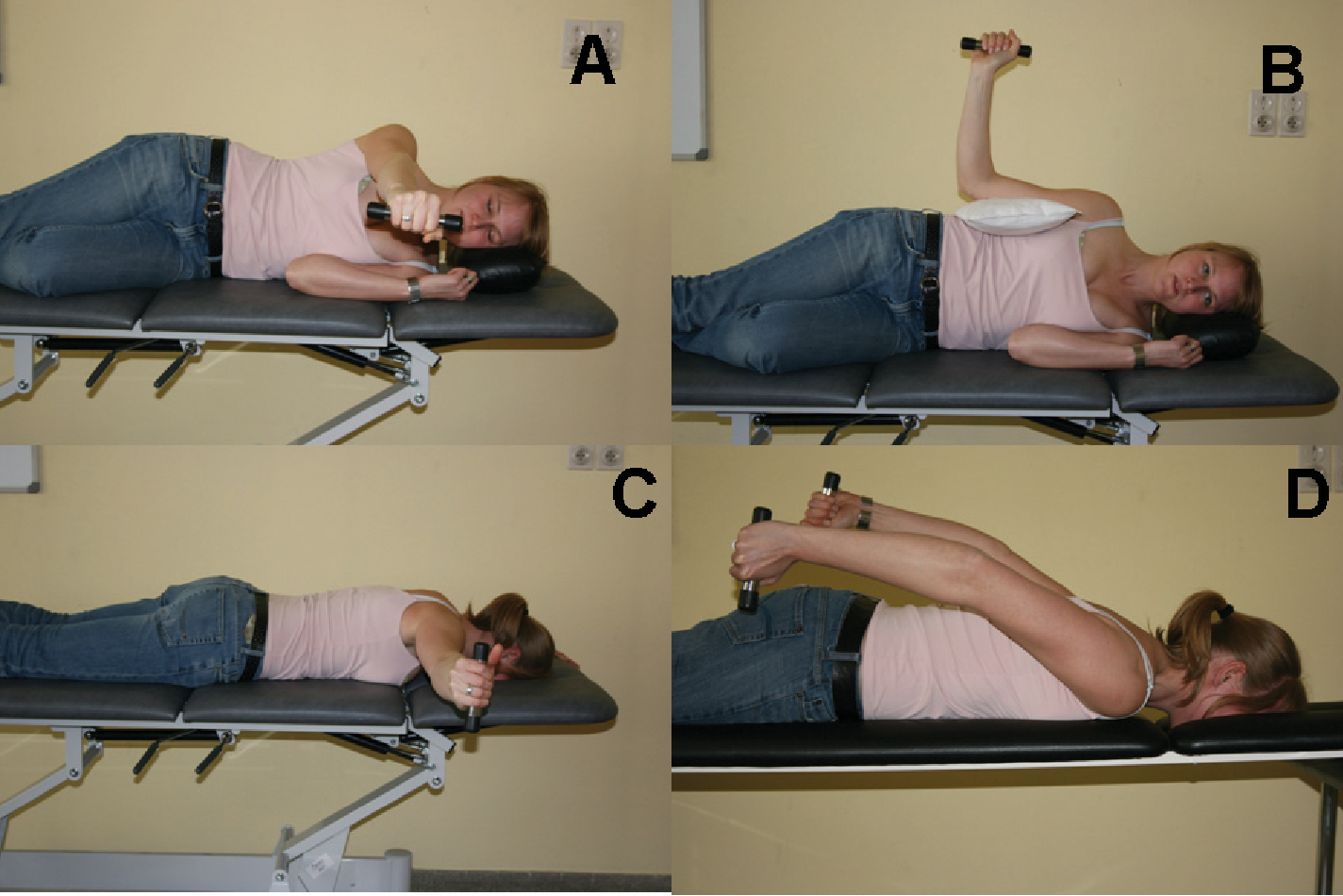 «>
«>Адамович С.В., Флует Г.Г., Матай А., Цю Кью, Льюис Дж., Мерианс А.С.: Разработка комплексной симуляции виртуальной реальности для обучения движениям пальцев у людей с гемипарезом: экспериментальное исследование концепции. J Neuroeng Rehabil 2009, 6: 28.[http://dx.doi.org/10.1186/1743-0003-6-28] []
PubMed ПабМед Центральный Статья Google Scholar
Marchal-Crespo L, Reinkensmeyer DJ: Обзор стратегий управления роботизированным обучением движению после неврологической травмы. J Neuroeng Rehabil 2009, 6: 20. [http://dx.doi.org/10.1186/1743-0003-6-20] []
PubMed ПабМед Центральный Статья Google Scholar
Паттон Дж.Л., Стойков М.Е., Кович М., Мусса-Ивальди Ф.А.: Оценка тренировочных сил роботов, которые увеличивают или уменьшают количество ошибок у выживших после хронического гемипаретического инсульта. Exp Brain Res 2006, 168 (3):368-383. [http://dx.doi.org/10.1007/s00221-005-0097-8] [] 10.1007/s00221-005-0097-8
Exp Brain Res 2006, 168 (3):368-383. [http://dx.doi.org/10.1007/s00221-005-0097-8] [] 10.1007/s00221-005-0097-8
PubMed Статья Google Scholar
Hogan N: Контроль импеданса: подход к манипулированию. Часть 1 — Теория. J Dynamic Syst, Meas Control 1985, 107: 1-7.
Артикул Google Scholar
Отт К., Мукерджи Р., Накамура Ю.: Единый контроль импеданса и проводимости. В Proc. Международная конференция IEEE по робототехнике и автоматизации (ICRA) . Анкоридж, Аляска; 2010: 554-561.
Google Scholar
Frisoli A, Borelli L, Montagner A, Marcheschi S, Procopio C, Salsedo F, Bergamasco M, Carboncini MC, Tolaini M, Rossi B: Реабилитация руки с помощью роботизированного экзоскелета в виртуальной реальности. В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 631-642.
В Proc. 10-я Международная конференция IEEE по реабилитационной робототехнике (ICORR) . Нордвейк, Нидерланды; 2007: 631-642.
Google Scholar
Lo AC: Клинические модели недавних испытаний по реабилитации роботов. Am J Phys Med Rehabil 2012, 91 (11 Suppl 3):S204-S216. [http://dx.doi.org/10.1097/PHM.0b013e31826bcfa3] []
PubMed Статья Google Scholar
Kwakkel G, Kollen BJ, Krebs HI: Влияние роботизированной терапии на восстановление верхних конечностей после инсульта: систематический обзор. Neurorehabil Neural Repair 2008, 22 (2):111-121.
ПабМед ПабМед Центральный Статья Google Scholar
Mehrholz J, Platz T, Kugler J, Pohl M: Электромеханическая и роботизированная тренировка рук для улучшения функции рук и повседневной активности после инсульта. Cochrane Database Syst Rev 2008, 4: CD006876. [http://onlinelibrary.wiley.com/doi/10.1002/14651858.CD006876.pub2/полный] []
Cochrane Database Syst Rev 2008, 4: CD006876. [http://onlinelibrary.wiley.com/doi/10.1002/14651858.CD006876.pub2/полный] []
PubMed Google Scholar
Timmermans AAA, Seelen HAM, Willmann RD, Kingma H: Технологическая тренировка рук и рук при инсульте: концепции повторного приобретения двигательного контроля и рекомендации терапевтов по разработке технологий реабилитации. J Neuroeng Rehabil 2009, 6: 1. [http://dx.doi.org/10.1186/1743-0003-6-1] []
PubMed ПабМед Центральный Статья Google Scholar
Waldner A, Tomelleri C, Hesse S: Перенос научных концепций в клиническую практику: недавние исследования по роботизированному обучению. Функц Нейрол 2009, 24 (4):173-177.
ПабМед Google Scholar
 «>
«>Lo AC, Guarino PD, Richards LG, Haselkorn JK, Wittenberg GF, Federman DG, Ringer RJ, Wagner TH, Krebs HI, Volpe BT, Bever Jr CT, Bravata DM, Duncan PW, Corn BH, Maffucci AD, Nadeau SE, Conroy SS, Powell JM, Huang GD, Peduzzi P: Роботизированная терапия при длительном поражении верхних конечностей после инсульта. N Engl J Med 2010, 362 (19):1772-1783.[http://dx.doi.org/10.1056/NEJMoa0
1] [] 10.1056/NEJMoa01CAS пабмед Статья Google Scholar
Brochard S, Robertson J, Médée B, Rémy-Néris O: Что нового в новых технологиях реабилитации верхних конечностей? Curr Opin Neurol 2010, 23 (6):683-687. [http://dx.doi.org/10.1097/WCO.0b013e32833f61ce] [] 10.1097/WCO.0b013e32833f61ce
PubMed Статья Google Scholar
Reinkensmeyer DJ, Boninger ML: Технологии и комбинированная терапия для повышения двигательной подготовки людей с ограниченными возможностями. J Neuroeng Rehabil 2012, 9: 17. [http://dx.doi.org/10.1186/1743-0003-9-17] []
J Neuroeng Rehabil 2012, 9: 17. [http://dx.doi.org/10.1186/1743-0003-9-17] []
PubMed ПабМед Центральный Статья Google Scholar
Новое лечение позволяет некоторым людям с травмой спинного мозга восстановить функцию кисти и руки
Инжиниринг | Здоровье и медицина | Пресс-релизы | Исследования | Наука | Звуковые фрагменты | Технология | Видео
12 января 2021 г.
Примечание: это видео было создано в январе 2020 года
Ежегодно почти 18 000 американцев получают травмы спинного мозга.Многие из этих людей не могут пользоваться руками и выполнять повседневные задачи, такие как прием пищи, уход за собой или питье воды без посторонней помощи.
Используя физиотерапию в сочетании с неинвазивным методом стимуляции нервных клеток в спинном мозге, исследователи из Вашингтонского университета помогли шести участникам из Сиэтла восстановить некоторую подвижность рук и кистей.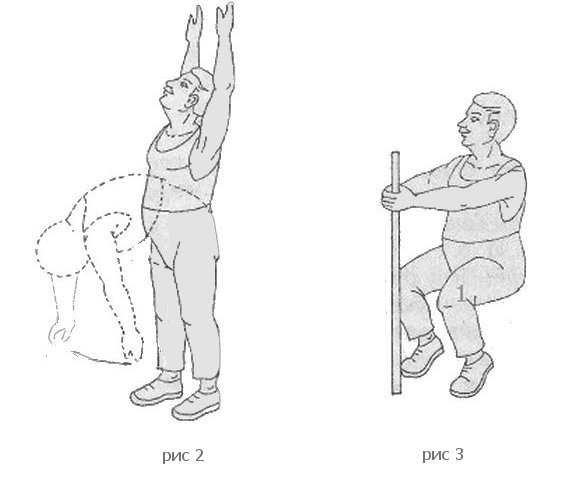 Эта повышенная подвижность продолжалась по крайней мере от трех до шести месяцев после окончания лечения. Исследовательская группа опубликовала эти выводы в январе.5 в журнале IEEE Transactions on Neural Systems and Rehabilitation Engineering.
Эта повышенная подвижность продолжалась по крайней мере от трех до шести месяцев после окончания лечения. Исследовательская группа опубликовала эти выводы в январе.5 в журнале IEEE Transactions on Neural Systems and Rehabilitation Engineering.
«Руками мы пользуемся для всего — едим, чистим зубы, застегиваем рубашки. Пациенты с травмой спинного мозга оценивают восстановление функции рук как абсолютный приоритет лечения. Это в пять-шесть раз важнее, чем что-либо еще, о чем они просят помощи», — сказала ведущий автор доктор Фатьма Инаничи, старший научный сотрудник Университета Вашингтона в области электротехники и вычислительной техники, которая завершила это исследование в качестве докторанта реабилитационной медицины в Университете Вашингтона. Медицинский факультет Университета Вашингтона.
«В начале нашего исследования, — сказал Инаничи, — я не ожидал такой немедленной реакции, начиная с самого первого сеанса стимуляции. Как врач-реабилитолог, по моему опыту, всегда был предел тому, насколько люди выздоравливают. Но теперь похоже, что это меняется. Так приятно видеть эти результаты».
Но теперь похоже, что это меняется. Так приятно видеть эти результаты».
Фатма Инаничи накладывает небольшие пластыри, которые передают электрический ток к поврежденному участку на шее участника. Примечание: эта фотография была сделана в 2018 году.Маркус Доннер/Центр нейротехнологий
После травмы спинного мозга многие пациенты прибегают к физиотерапии, чтобы попытаться восстановить подвижность. Недавно серия исследований показала, что имплантация стимулятора для подачи электрического тока к поврежденному спинному мозгу может помочь парализованным пациентам снова ходить.
Команда UW, состоящая из исследователей из Центра нейротехнологий, объединила стимуляцию со стандартными физиотерапевтическими упражнениями, но стимуляция не требует хирургического вмешательства.Вместо этого он включает в себя небольшие пятна, которые прилипают к коже участника, как лейкопластырь. Эти пластыри помещаются вокруг поврежденного участка на задней части шеи, где они передают электрические импульсы.
Исследователи набрали шесть человек с хроническими травмами спинного мозга. Все участники были травмированы не менее полутора лет назад. Некоторые участники не могли шевелить пальцами или большими пальцами, в то время как у других была некоторая подвижность в начале исследования.
Чтобы изучить жизнеспособность метода стимуляции поверхности кожи, исследователи разработали пятимесячную программу обучения.В течение первого месяца исследователи каждую неделю отслеживали базовые движения конечностей участников. Затем в течение второго месяца команда проводила с участниками интенсивные занятия по физиотерапии три раза в неделю по два часа за раз. В течение третьего месяца участники продолжали физиотерапевтические тренировки, но с добавлением стимуляции.
«Мы включили устройство, но они продолжали выполнять те же упражнения, что и в предыдущем месяце, переходя к немного более сложным вариантам, если они улучшались», — сказал Инаничи.
Участники переходили к более сложным версиям тренировочных упражнений (например, переходили от взятия мячика для пинг-понга к поднятию крошечной бусинки, как показано здесь) по мере улучшения. Примечание. Эта фотография была сделана в 2019 году. Маркус Доннер/Центр нейротехнологий
Примечание. Эта фотография была сделана в 2019 году. Маркус Доннер/Центр нейротехнологий
В течение последних двух месяцев исследования участники были разделены на две категории: участники с менее серьезными травмами получали еще один месяц тренировок в одиночку, а затем месяц тренировок плюс стимуляция.Пациенты с более тяжелыми травмами получали противоположное — сначала тренировку и стимуляцию, а затем только тренировку.
Исследователи разработали пятимесячную программу тренировок, которая включала месячные режимы тренировок в одиночку или тренировки со стимуляцией. Inanici et. al, IEEE Transactions on Neural Systems and Rehabilitation Engineering
В то время как некоторые участники восстановили некоторые функции рук только во время тренировки, у всех шести наблюдались улучшения, когда стимуляция сочеталась с тренировкой.
«Оба человека, которые не двигали руками в начале исследования, снова начали двигать руками во время стимуляции и смогли произвести измеримое усилие между пальцами и большим пальцем», — сказал старший автор Чет Мориц, доцент кафедры электротехники Университета Вашингтона. и компьютерная инженерия, реабилитационная медицина и физиология и биофизика. «Это резкое изменение: перейти от полного паралича ниже запястий к свободному движению рук».
и компьютерная инженерия, реабилитационная медицина и физиология и биофизика. «Это резкое изменение: перейти от полного паралича ниже запястий к свободному движению рук».
Кроме того, некоторые участники заметили другие улучшения, в том числе более нормальный сердечный ритм и лучшую регуляцию температуры тела и функции мочевого пузыря.
Команда наблюдала за участниками в течение шести месяцев после тренировки и обнаружила, что эти улучшения сохраняются, несмотря на отсутствие стимуляции.
«Мы думаем, что эти стимуляторы приводят нервы, которые заставляют ваши мышцы сокращаться, очень близко к активности. На самом деле они не заставляют мышцу двигаться, но подготавливают ее к движению. Он готов, как спринтер в начале гонки», — сказал Мориц, который также является содиректором Центра нейротехнологий. «Тогда, когда кто-то с травмой спинного мозга хочет двигаться, нескольких соединений, которые могли быть сохранены вокруг травмы, достаточно, чтобы заставить эти мышцы сокращаться.
Чет Мориц (слева) и Фатьма Инаничи (в центре) наблюдают, как участник (справа) измеряет силу захвата (сжимая устройство в руке). У участника есть датчики на руках (черные футляры) для измерения активности мышц рук во время выполнения задания. Примечание. Эта фотография была сделана в 2019 году. Маркус Доннер/Центр нейротехнологий
.Исследование направлено на помощь людям в клинике. Результаты этого исследования уже легли в основу дизайна международного многоцентрового клинического испытания, которым будет руководить Мориц.Один из ведущих сайтов будет на UW.
«Мы видим общую тему во всех университетах — электрическая стимуляция спинного мозга делает людей лучше», — сказал Мориц, который также является профессором CJ и Элизабет Хванг в области электротехники и вычислительной техники. «Но для этого нужна мотивация. Стимулятор помогает выполнять упражнения, а упражнения помогают стать сильнее, но улучшения происходят постепенно. Однако со временем они складываются во что-то действительно поразительное.
Лори Брайтон, научный сотрудник UW; Соши Самедзима, докторант Университета Вашингтона в области реабилитационной медицины; и доктор Кристоф Хофстеттер, адъюнкт-профессор неврологической хирургии Медицинской школы Университета Вашингтона, являются соавторами этой статьи. Это исследование финансировалось Центром нейротехнологий, Консорциумом по травмам спинного мозга штата Вашингтон и Фондом Кристофера и Даны Рив.
Для получения дополнительной информации обращайтесь к Инаничи по адресу [email protected] и к Морицу по адресу ctmoritz@uw.образование
Номер гранта: EEC-1028725
Теги: Центр нейротехнологий • Чет Мориц • Инженерный колледж • Факультет электротехники и вычислительной техники • Кафедра физиологии и биофизики • Кафедра реабилитационной медицины • Фатма Инаничи • Медицинский факультетСистематический обзор двусторонних тренажеров верхних конечностей для постинсультной реабилитации
Введение . В реабилитации после инсульта все большее распространение получает двусторонняя тренировка верхних конечностей. В результате было предложено все больше механических и роботизированных двусторонних тренажеров для верхних конечностей. Цель . Предоставить обзор и качественную оценку клинической применимости билатеральных устройств для тренировки верхних конечностей. Методы . Поиск потенциально релевантной литературы проводился в базах данных PubMed, Web of Science и Google Scholar с 1990 года. Устройства были классифицированы как механические или роботизированные (в соответствии с термином робототехники PubMed MeSH). Результаты . Всего было оценено 6 механических и 14 роботизированных билатеральных тренажеров верхних конечностей с точки зрения механических и электромеханических характеристик, моделей поддерживаемых движений, целевой части и активного участия верхней конечности, протоколов тренировок, результатов клинических испытаний и коммерческой доступности. Заключение . Первоначальные клинические результаты еще не достигли такого уровня, чтобы рассматриваемые устройства и концепции, на которых они основаны, были твердо установлены. Тем не менее, клинические результаты не исключают возможности того, что концепция билатерального обучения и сопутствующие устройства могут обеспечить полезное расширение доступных в настоящее время форм терапии. Чтобы на самом деле продемонстрировать их (прибавочную) ценность, необходимы дополнительные исследования с адекватными экспериментальными планами с подобранными дозами и достаточной статистической мощностью.
Тем не менее, клинические результаты не исключают возможности того, что концепция билатерального обучения и сопутствующие устройства могут обеспечить полезное расширение доступных в настоящее время форм терапии. Чтобы на самом деле продемонстрировать их (прибавочную) ценность, необходимы дополнительные исследования с адекватными экспериментальными планами с подобранными дозами и достаточной статистической мощностью.
1. Введение
По мере развития технологий для реабилитации после инсульта предлагается все больше механических и роботизированных тренажеров (т. е. механических устройств с электронными компьютеризированными системами управления) для тренировки верхних конечностей.Преимущество этих тренажеров по сравнению с традиционной терапией состоит в том, что они позволяют самостоятельно увеличивать интенсивность и частоту тренировок, а также дают возможность тренироваться самостоятельно [1–4]. В последние годы значительное количество этих тренажеров было разработано специально для двусторонней тренировки верхних конечностей, но до сих пор отсутствовали всесторонний обзор и оценка. Настоящее исследование направлено на восполнение этого пробела.
Настоящее исследование направлено на восполнение этого пробела.
Двусторонняя тренировка верхних конечностей ни в коем случае не является новой формой реабилитации после инсульта.С давних пор терапевты изобретательно использовали приспособления, такие как шкивы, для перемещения наиболее поврежденной верхней конечности одновременно с менее пораженной верхней конечностью [5]. Тем не менее, нынешний всплеск интереса к билатеральной тренировке верхних конечностей имеет относительно короткую историю и возник частично по счастливой случайности [6, 7], а частично из идей, почерпнутых из литературы по контролю движений. В этой литературе эффекты сцепления (или взаимодействия) между двумя верхними конечностями широко изучались в исследованиях ритмической координации между конечностями с участием здоровых людей [8-12].Хорошо известно, что здоровые люди демонстрируют основную тенденцию к синфазной (т. е. симметричные движения) или противофазной (т. е. чередующиеся движения) координации с преобладанием частотного режима 1 : 1 для билатеральных движений верхних конечностей [12]. Эти тенденции отражают связь между верхними конечностями. Основываясь на предположении, что эта связь способствует функциональному восстановлению паретичной руки, ее используют при билатеральной тренировке верхних конечностей, обычно за счет движения обеих рук и/или кистей либо в синфазной, либо в противофазной координации.Однако в настоящее время неясно, следует ли предпочесть один шаблон другому.
Эти тенденции отражают связь между верхними конечностями. Основываясь на предположении, что эта связь способствует функциональному восстановлению паретичной руки, ее используют при билатеральной тренировке верхних конечностей, обычно за счет движения обеих рук и/или кистей либо в синфазной, либо в противофазной координации.Однако в настоящее время неясно, следует ли предпочесть один шаблон другому.
Недавние систематические обзоры дали неоднозначные результаты в отношении превосходства или неполноценности билатеральной тренировки верхних конечностей по сравнению с другими вмешательствами в постинсультной реабилитации. В двух таких обзорах были найдены убедительные доказательства в поддержку билатеральной тренировки верхних конечностей после инсульта [13, 14]. Другой обзор был более сдержан в своих выводах, чем два предыдущих [15], а три систематических обзора пришли к выводу, что билатеральная тренировка в лучшем случае эффективна так же, как и другие методы лечения, но определенно не лучше [16–18]. Эти смешанные результаты могут быть связаны с неоднородностью типов билатеральной тренировки верхних конечностей и устройств, используемых в клинических испытаниях. Таким образом, обзор и оценка клинической применимости билатеральных устройств для тренировки верхних конечностей могут быть полезны для направления будущих исследований в этом отношении.
Эти смешанные результаты могут быть связаны с неоднородностью типов билатеральной тренировки верхних конечностей и устройств, используемых в клинических испытаниях. Таким образом, обзор и оценка клинической применимости билатеральных устройств для тренировки верхних конечностей могут быть полезны для направления будущих исследований в этом отношении.
В настоящем систематическом обзоре оцениваются билатеральные тренажеры, предназначенные для тренировки верхних конечностей после инсульта, с точки зрения (1) механических и электромеханических характеристик, (2) моделей поддерживаемых движений, (3) целевой части и активного участия верхней конечности, (4) протоколы обучения, (5) результаты клинических испытаний и (6) коммерческая доступность.Целью статьи является качественная оценка этих аспектов, поскольку для рассматриваемых устройств недостаточно рандомизированных клинических испытаний для статистической оценки или сравнения клинических результатов. Поэтому мы стремимся сравнивать и интегрировать концепции, результаты и идеи, полученные в основном из качественных исследований, кульминацией которых является обзор тренажеров для постинсультной реабилитации, оценка их клинической применимости, а также некоторые общие выводы и рекомендации для будущих разработок и исследований.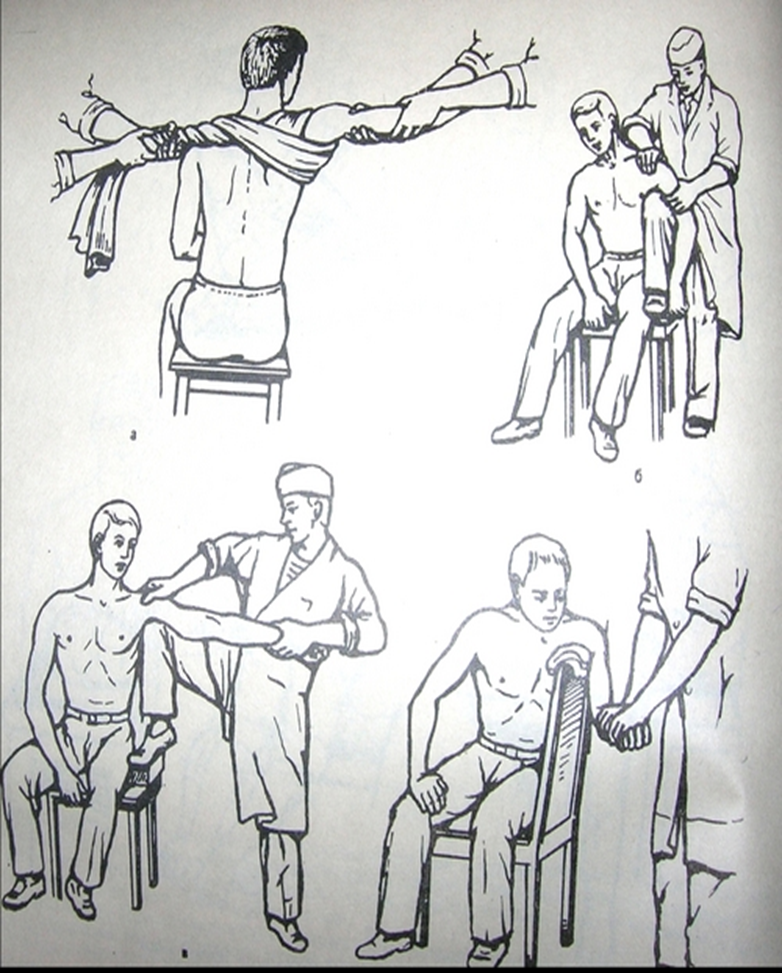
2. Методы
Устройство для двусторонней тренировки верхних конечностей было определено как устройство, разработанное для реабилитации верхних конечностей, которое либо специально разработано для двусторонней тренировки, либо, по крайней мере, поддерживает двустороннюю тренировку как один из основных режимов тренировки, при котором обе верхние конечности выполняют одновременную работу. движения с активным движением одной конечности и активно-пассивно или с помощью другой конечности.
Соответствующая литература была выявлена путем компьютеризированного и ручного поиска в следующих электронных базах данных: PubMed, Web of Science и Google Scholar.Поиск в этих базах данных проводился с использованием следующих заголовков MeSH и ключевых слов: (i) цереброваскулярное расстройство$, нарушение мозгового кровообращения, инсульт, инсульт, гемипаретический инсульт, парез, гемипарез, гемиплегия, (ii) верхняя конечность$, верхняя конечность$, рука$, предплечье$, запястье$, кисть$, палец$,(iii)билат$, бимануальный$(iv)робот$, механ$, устройство.
Библиографии обзорных статей, эмпирических статей и рефератов, опубликованных в трудах конференций, также были изучены. В дальнейших итерациях были изучены ссылки из извлеченных статей для выявления дополнительных релевантных статей.В свете недавнего интереса к билатеральной тренировке верхних конечностей в литературе по реабилитации после инсульта [6, 19] был проведен поиск только статей, опубликованных с 1990 года.
Устройства были выбраны для обсуждения, если они соответствовали вышеупомянутому определению устройства для двусторонней тренировки верхних конечностей. Устройства были отнесены к категории роботизированных устройств, когда они соответствовали описанию термина робототехники PubMed MeSH. Все остальные устройства были отнесены к категории механических устройств. Обе категории обсуждаются в отдельных параграфах.
3. Результаты
Поиск привел к 311 единичным ссылкам, 70 из которых касались 20 различных двусторонних тренажеров. Из них 6 механических и 14 роботизированных устройств.
3.1. Механические устройства
3.1.1. BATRAC (Tailwind)
Двусторонняя тренировка рук с ритмическими слуховыми сигналами (BATRAC) была введена в 2000 году [20] вместе с изготовленным на заказ двусторонним тренажером для рук. Устройство состоит из двух независимых Т-образных рукояток, установленных на направляющих практически без трения, которые могут перемещаться в поперечной плоскости перпендикулярно пользователю.Ручки нужно толкать вперед и отводить назад либо обеими верхними конечностями одновременно (синфазно), либо попеременно (противофазно) с частотой, определяемой метрономом, обеспечивающим слуховые сигналы. Если больной не может удерживать рукоятку рукой наиболее пораженной верхней конечности, кисть привязывается к ней. Оригинальный протокол BATRAC специально фокусируется на функции плечевого и локтевого суставов. Модифицированная версия исходного протокола BATRAC фокусируется на функции дистальных отделов верхней конечности [21]. Для целей последнего протокола было разработано устройство, состоящее из двух манипуляторов с рукоятками, которые можно установить на дистальных концах подлокотников кресла (см. рис. 1(а)).Манипуланда обеспечивает сгибание и разгибание запястья в горизонтальной плоскости и должна выполняться ритмично в темпе слухового метронома либо зеркально-симметричным (синфазным), либо чередующимся (противофазным) способом. Визуальная обратная связь обеспечивается в виде дисплея Лиссажу, амплитуд движений левой и правой руки и относительной фазы (и ее вариабельности) между обеими руками (см. Рисунок 1(b)).
рис. 1(а)).Манипуланда обеспечивает сгибание и разгибание запястья в горизонтальной плоскости и должна выполняться ритмично в темпе слухового метронома либо зеркально-симметричным (синфазным), либо чередующимся (противофазным) способом. Визуальная обратная связь обеспечивается в виде дисплея Лиссажу, амплитуд движений левой и правой руки и относительной фазы (и ее вариабельности) между обеими руками (см. Рисунок 1(b)).
Первоначальный протокол BATRAC был впервые использован в пилотном исследовании с участием одной группы пациентов с хроническим инсультом (т.д., более 6 мес после начала инсульта) [20]. Четырнадцать пациентов получали BATRAC в течение 6 недель, три раза в неделю, четыре раза по 5 минут за сеанс. Оценка после лечения выявила улучшения в оценке Фугля-Мейера (FMA), тесте двигательной функции Вольфа (WMFT), вопроснике Университета Мэриленда для инсульта, измеряющем ежедневное использование наиболее поврежденной верхней конечности, а также показатели силы и диапазон движений для наиболее и менее пораженная верхняя конечность.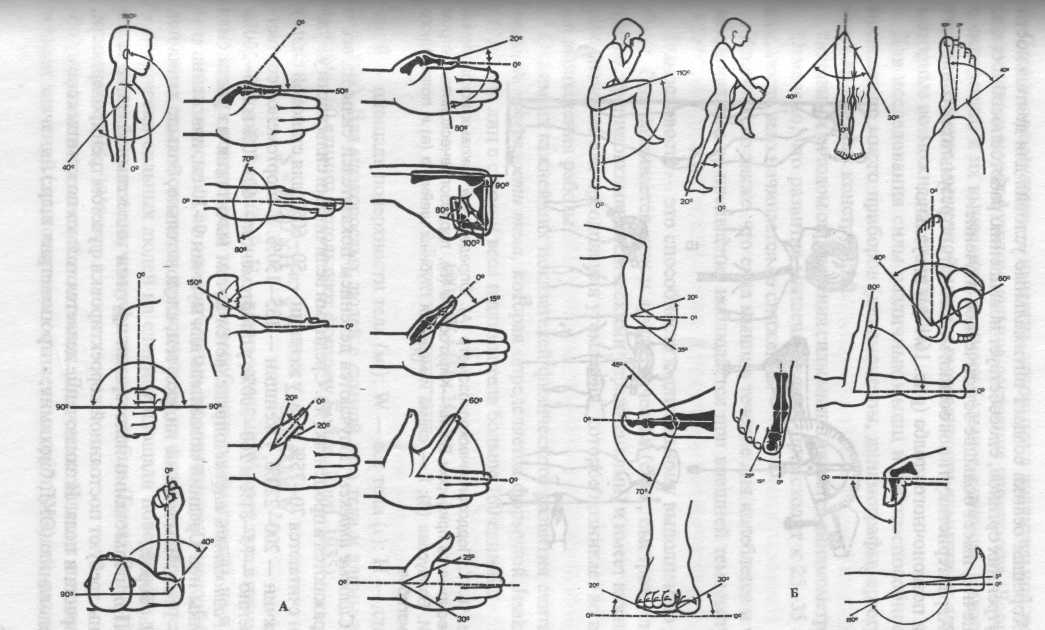 Большинство этих преимуществ сохранялись в течение 8 недель наблюдения.
Большинство этих преимуществ сохранялись в течение 8 недель наблюдения.
В другом исследовании [22] изучалась эффективность модифицированной версии протокола BATRAC. В этом исследовании 14 пациентов с хроническим инсультом участвовали в четырех сеансах BATRAC продолжительностью более 2 часов в неделю в течение 2 недель. Хотя никаких существенных изменений в FMA или WMFT не было обнаружено в результате этого вмешательства, пациенты сообщили об увеличении ежедневного использования наиболее пораженной верхней конечности, о чем свидетельствуют значительные изменения в журнале двигательной активности (MAL).
В крупном РКИ с участием пациентов с хроническим инсультом BATRAC сравнивали с подобранными по дозе лечебными упражнениями [23].В общей сложности 111 пациентов были рандомизированы в обе группы вмешательства и проходили 6-недельные тренировки по 3 тренировки в неделю. Улучшения функции верхних конечностей были сопоставимы между обеими группами после лечения и сохранялись через 4 месяца./GettyImages-508022270-570874993df78c7d9ece8fd3.jpg) Однако после BATRAC наблюдалась более значительная адаптация в активации мозга, чем после контрольного лечения, что позволяет предположить, что оба лечения относятся к разным лежащим в основе нейронным механизмам.
Однако после BATRAC наблюдалась более значительная адаптация в активации мозга, чем после контрольного лечения, что позволяет предположить, что оба лечения относятся к разным лежащим в основе нейронным механизмам.
В настоящее время проводится РКИ с участием 60 пациентов в подострой фазе после инсульта (1–6 мес) [21].В этом РКИ устройство BATRAC для дистальных движений верхних конечностей (рис. 1) используется и сравнивается с двигательной терапией, индуцированной ограничениями, и традиционной физиотерапией. Это РКИ будет завершено к концу этого года, и отчет о нем будет представлен в 2013/2014 гг.
Коммерческая версия BATRAC под названием Tailwind (см. рис. 2) производится и продается компанией Encore Path, Inc., Балтимор, Мэриленд, США, а также доступна в Anatomical Concepts UK Ltd., Клайдленд, Шотландия. Это устройство предназначено для домашних тренировок и отличается от оригинального устройства тем, что Tailwind также допускает движения вверх и наружу.Устройство BATRAC для движений вокруг запястья не продается.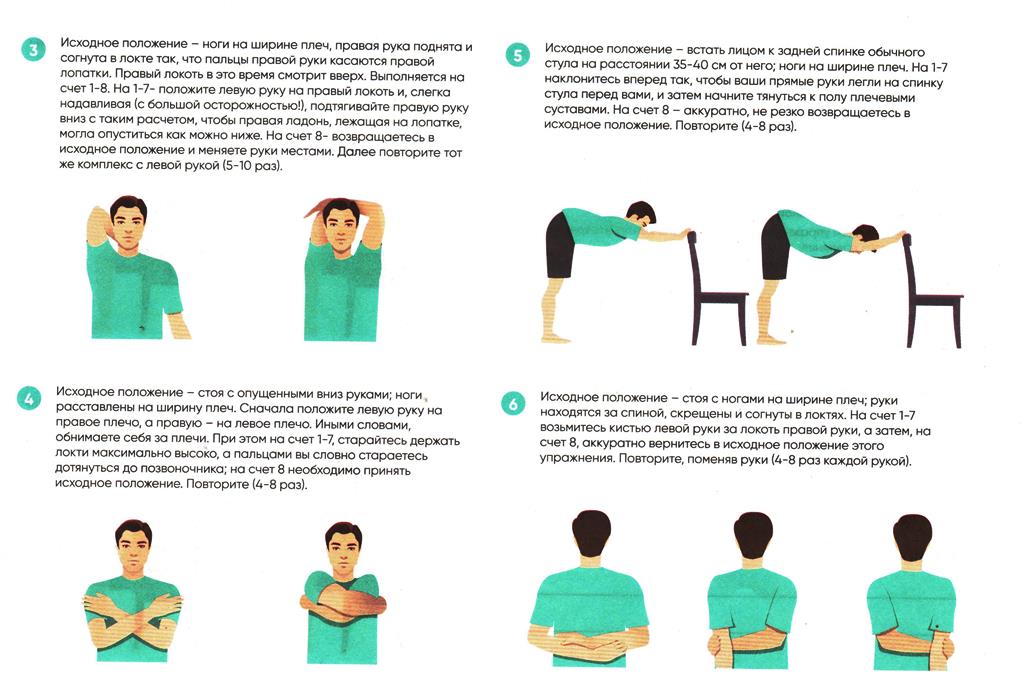
3.1.2. Reha-Slide Duo и Reha-Slide (Nudelholz)
Reha-Slide Duo (см. рис. 3) состоит из доски с двумя салазками, движущимися по параллельным дорожкам [24]. Две ручки на санях можно перемещать вперед и назад по отдельности, подобно Tailwind, используемому для BATRAC. Доска, на которой размещены гусеницы, может быть наклонена до 20° для движения вверх, а трение для движения вперед и назад может регулироваться отдельно для обеих ручек с помощью регулируемых резиновых тормозных элементов в диапазоне от 5 Н до 80 Н (при доска горизонтальная).
Reha-Slide Duo был включен в мастерскую по реабилитации верхних конечностей [24]. Однако на сегодняшний день не было сообщено о клинических результатах конкретно для Reha-Slide Duo.
Reha-Slide (Nudelholz, см. рис. 4) состоит из той же наклонной доски с параллельными дорожками и санями, что и Reha-Slide Duo; однако дополнительный стержень соединяет две ручки на расстоянии 75 см друг от друга с каждой стороны, подобно скалке [25]. Стержень можно перемещать вперед и назад на 30 см (разгибание и сгибание в локтевом суставе), в стороны на 15 см в обоих направлениях (отведение и приведение плеча) и вращать на 360° (сгибание и разгибание в запястье).Ручки соединены ярмом, так что верхняя конечность с меньшими нарушениями может управлять самой поврежденной верхней конечностью во время тренировки. Доска, на которой размещены гусеницы, может быть наклонена до 20° для движения вверх, а трение для движения вперед и назад может регулироваться с помощью регулируемых резиновых тормозных элементов в диапазоне от 5 Н до 80 Н (при горизонтальном положении доски). Беспроводная компьютерная мышь может быть закреплена на стержне по центру для взаимодействия с компьютерным программным обеспечением (игры и биологическая обратная связь).
Стержень можно перемещать вперед и назад на 30 см (разгибание и сгибание в локтевом суставе), в стороны на 15 см в обоих направлениях (отведение и приведение плеча) и вращать на 360° (сгибание и разгибание в запястье).Ручки соединены ярмом, так что верхняя конечность с меньшими нарушениями может управлять самой поврежденной верхней конечностью во время тренировки. Доска, на которой размещены гусеницы, может быть наклонена до 20° для движения вверх, а трение для движения вперед и назад может регулироваться с помощью регулируемых резиновых тормозных элементов в диапазоне от 5 Н до 80 Н (при горизонтальном положении доски). Беспроводная компьютерная мышь может быть закреплена на стержне по центру для взаимодействия с компьютерным программным обеспечением (игры и биологическая обратная связь).
Reha-Slide был впервые испытан на 2 пациентах через 5 и 6 недель после инсульта [25].Оба пациента тренировались по 20–30 минут каждый рабочий день в течение 6 недель с использованием Reha-Slide в дополнение к 10-недельной стационарной программе реабилитации, включающей 4 раза в неделю 45 минут физиотерапии и 3 раза в неделю 45 минут трудотерапии, следуя принципам. нейроразвивающей терапии (НДТ). Лечение Reha-Slide включало в себя отработку циклов движений вперед-назад и рисование квадрата по часовой и против часовой стрелки, вращая запястья. Эти упражнения повторялись с доской, наклоненной таким образом, чтобы пациент поднимал руки на уровень плеч.Общее количество отработанных двигательных циклов составило около 400. Оба пациента показали улучшение мышечной силы и показателей FMA.
нейроразвивающей терапии (НДТ). Лечение Reha-Slide включало в себя отработку циклов движений вперед-назад и рисование квадрата по часовой и против часовой стрелки, вращая запястья. Эти упражнения повторялись с доской, наклоненной таким образом, чтобы пациент поднимал руки на уровень плеч.Общее количество отработанных двигательных циклов составило около 400. Оба пациента показали улучшение мышечной силы и показателей FMA.
В РКИ эффекты лечения с помощью Reha-Slide сравнивали с электрической стимуляцией разгибателей запястья [26]. Пятьдесят четыре стационарных пациента через 4–8 недель после инсульта были рандомизированы на две группы. Группа Reha-Slide получила такой же протокол, как описано выше [25]; однако степень наклона всегда устанавливалась таким образом, чтобы рукоятки достигали уровня плеч, а уровень трения вперед-назад увеличивался в течение нескольких недель тренировок.Метроном помогал регулировать темп движений, а в конце каждого сеанса пациенты играли в компьютерную игру по своему выбору в течение 5 минут. Группа электростимуляции практиковала 60–80 повторений разгибания запястья за 30-минутный сеанс. Все пациенты также участвовали в стационарной реабилитационной программе продолжительностью 8–10 недель, основанной на принципах неразрушающего контроля, включающей 5 45-минутных сеансов физиотерапии и 4 30-минутных сеанса трудотерапии в неделю. Показатель FMA и улучшение мышечной силы существенно не отличались между группами как после лечения, так и через 3 месяца наблюдения.Улучшение после лечения в Box and Block Test (BBT) было больше в группе Reha-Slide, но эта разница исчезла через 3 месяца наблюдения. Мышечный тонус (измеренный с помощью MAS) значительно различался по группам через 3 месяца наблюдения с увеличением тонуса в группе с электростимуляцией.
Группа электростимуляции практиковала 60–80 повторений разгибания запястья за 30-минутный сеанс. Все пациенты также участвовали в стационарной реабилитационной программе продолжительностью 8–10 недель, основанной на принципах неразрушающего контроля, включающей 5 45-минутных сеансов физиотерапии и 4 30-минутных сеанса трудотерапии в неделю. Показатель FMA и улучшение мышечной силы существенно не отличались между группами как после лечения, так и через 3 месяца наблюдения.Улучшение после лечения в Box and Block Test (BBT) было больше в группе Reha-Slide, но эта разница исчезла через 3 месяца наблюдения. Мышечный тонус (измеренный с помощью MAS) значительно различался по группам через 3 месяца наблюдения с увеличением тонуса в группе с электростимуляцией.
Reha-Slide и Reha-Slide Duo можно приобрести в Reha-Stim, Берлин, Германия.
3.1.3. АПБТ (Rocker)
Аппарат, применяемый для активно-пассивной бимануальной двигательной терапии (АПБТ, см. рис. 5), представляет собой заказную систему соединенных коленчатых валов, расположенных в корпусе аппарата, соединяющего два манипулятора [27]. Он поддерживает зеркально-симметричную или почти симметричную (отставание по фазе 60°) координацию движений сгибания и разгибания запястья в горизонтальной плоскости. С помощью этой системы активно двигающаяся менее поврежденная верхняя конечность может пассивно двигать наиболее поврежденной верхней конечностью либо синхронно, либо (с отставанием по фазе на 60°) асинхронно.
Он поддерживает зеркально-симметричную или почти симметричную (отставание по фазе 60°) координацию движений сгибания и разгибания запястья в горизонтальной плоскости. С помощью этой системы активно двигающаяся менее поврежденная верхняя конечность может пассивно двигать наиболее поврежденной верхней конечностью либо синхронно, либо (с отставанием по фазе на 60°) асинхронно.
В пилотном исследовании 9 пациентов с инсультом (с началом от 2 до 84 месяцев до включения в исследование) участвовали в шести 10-минутных сеансах APBT в день в течение 4 недель [27].Вмешательство практиковалось ритмично с собственной скоростью движения (примерно 1,2 Гц). Пять пациентов практиковали синхронные движения, а четыре пациента практиковали асинхронные движения. Пациентам было рекомендовано поддерживать наиболее поврежденные мышцы верхних конечностей в состоянии покоя. После лечения пять из девяти пациентов (из обеих групп) увеличили свои баллы FMA более чем на 10%. Эти улучшители также показали уменьшение пораженного объема карты коры. Последующей оценки не было.
Последующей оценки не было.
В РКИ 32 пациента с хроническим инсультом были рандомизированы на две группы [28].Пациенты в контрольной группе получили набор деревянных блоков и были проинструктированы выполнять два самостоятельных домашних задания (перенос и манипулирование деревянными блоками) с их наиболее пораженной верхней конечностью в течение 10 минут, 3 раза в день, в течение 4 минут. недели. Пациенты в группе APBT получили тот же набор деревянных блоков и те же инструкции, но также имели доступ к устройству APBT. Им предписывалось использовать аппарат АПБТ для зеркально-симметричных движений кистей за 10–15 мин до выполнения упражнений с блоками.Сначала внимание должно быть сосредоточено на менее пораженной верхней конечности в начале каждого сеанса, после чего следует постепенный переход к наиболее пораженной верхней конечности. На третьей неделе им было предложено представить, что они активно производят движения своего наиболее поврежденного запястья с прогрессированием к двусторонним активным движениям на четвертой неделе. Через 1 месяц наблюдения показатели изменения FMA были значительно выше в группе APBT, чем в контрольной группе. Эта разница отсутствовала при оценке сразу после лечения.Не было никаких существенных различий в силе хвата и баллах по шкале инсульта Национального института здоровья при любой оценке после лечения. Группа APBT показала значительное увеличение возбудимости ипсилозионного M1, транскаллозального торможения от ипсилозионного к контралатеральному M1 и интракортикального торможения в контралазиональном M1, как сразу после лечения, так и через 1 месяц наблюдения. Эти изменения отсутствовали в контрольной группе в оба периода оценки. Обратите внимание, что вмешательства не были согласованы по дозе: группа APBT потратила больше времени на обучение.
Через 1 месяц наблюдения показатели изменения FMA были значительно выше в группе APBT, чем в контрольной группе. Эта разница отсутствовала при оценке сразу после лечения.Не было никаких существенных различий в силе хвата и баллах по шкале инсульта Национального института здоровья при любой оценке после лечения. Группа APBT показала значительное увеличение возбудимости ипсилозионного M1, транскаллозального торможения от ипсилозионного к контралатеральному M1 и интракортикального торможения в контралазиональном M1, как сразу после лечения, так и через 1 месяц наблюдения. Эти изменения отсутствовали в контрольной группе в оба периода оценки. Обратите внимание, что вмешательства не были согласованы по дозе: группа APBT потратила больше времени на обучение.
Эффекты дополнительной APBT также оценивались в одном исследовании серии случаев с двумя подобранными парами в подострой фазе после инсульта [29]. В дополнение к обычному стандартному лечению, состоящему из ежедневной трудотерапии и физиотерапии, все пациенты получали 20-30 минут двигательной практики 1 или 2 раза в день, 5 дней в неделю, в течение 1-3 недель. Двигательная практика включала в себя задания, направленные на улучшение стабильности, подвижности и силы суставов, а также упражнения на дотягивание, захват и освобождение.Кроме того, пациенты, получавшие дополнительную АТФТ, практиковали зеркально-симметричные движения сгибания и разгибания запястья в течение 10 минут до двигательной практики. Величина улучшения по FMA и тесту Action Research Arm Test (ARAT) после лечения, а также через 1 месяц наблюдения была выше у пациентов, которые получили дополнительную APBT. И снова вмешательства не были согласованы по дозе.
Двигательная практика включала в себя задания, направленные на улучшение стабильности, подвижности и силы суставов, а также упражнения на дотягивание, захват и освобождение.Кроме того, пациенты, получавшие дополнительную АТФТ, практиковали зеркально-симметричные движения сгибания и разгибания запястья в течение 10 минут до двигательной практики. Величина улучшения по FMA и тесту Action Research Arm Test (ARAT) после лечения, а также через 1 месяц наблюдения была выше у пациентов, которые получили дополнительную APBT. И снова вмешательства не были согласованы по дозе.
Устройство АПБТ (Рокер) в продаже не имеется.
3.1.4. Able-X
Недавно игровой контроллер на основе движения (CyWee Z) был встроен в изготовленный на заказ руль (Able-X, см. рис. 6), чтобы сделать его пригодным для двустороннего использования [30].Когда CyWee Z расположен на руле, вращение в поперечной плоскости приводит к горизонтальному перемещению курсора мыши на экране компьютера, а вращение в сагиттальной плоскости приводит к вертикальному перемещению курсора мыши. Используя набор игр, CyWee Z может предложить градуированную серию физических задач. руль с CyWee Z [30].Все пациенты получали контрольное лечение, затем период вымывания и, наконец, вмешательство. В течение начального контрольного периода пациенты играли в четыре простые компьютерные игры с мышью на персональном компьютере (ПК) с менее пораженной верхней конечностью. Обучение проводилось в виде групповых занятий, когда три участника играли на трех компьютерах под наблюдением одного или двух терапевтов в течение 2,5 недель, включающих от 8 до 10 занятий, каждое продолжительностью от 45 до 60 минут. Затем следовал период в 2-3 недели, в течение которого никаких вмешательств не оказывалось.Наконец, пациенты получили вмешательство, состоящее в том, чтобы играть в игры на ПК, используя специально изготовленный руль CyWee Z. Как и в контрольном лечении, три участника играли на трех ПК под наблюдением одного или двух терапевтов, то есть для двух типов лечения было обеспечено одинаковое количество взаимодействия с терапевтом.
Используя набор игр, CyWee Z может предложить градуированную серию физических задач. руль с CyWee Z [30].Все пациенты получали контрольное лечение, затем период вымывания и, наконец, вмешательство. В течение начального контрольного периода пациенты играли в четыре простые компьютерные игры с мышью на персональном компьютере (ПК) с менее пораженной верхней конечностью. Обучение проводилось в виде групповых занятий, когда три участника играли на трех компьютерах под наблюдением одного или двух терапевтов в течение 2,5 недель, включающих от 8 до 10 занятий, каждое продолжительностью от 45 до 60 минут. Затем следовал период в 2-3 недели, в течение которого никаких вмешательств не оказывалось.Наконец, пациенты получили вмешательство, состоящее в том, чтобы играть в игры на ПК, используя специально изготовленный руль CyWee Z. Как и в контрольном лечении, три участника играли на трех ПК под наблюдением одного или двух терапевтов, то есть для двух типов лечения было обеспечено одинаковое количество взаимодействия с терапевтом. Вмешательство длилось 8–10 сеансов по 45–60 минут в течение 2,5 недель. Во время каждой сессии участники делали минимум 500 повторений и, возможно, до 800 повторений.Одно повторение может быть движением вверх-вниз, движением влево-вправо или (в большинстве случаев) комбинацией того и другого (например, перемещение курсора из центра в правый верхний угол экрана). После вмешательства значительно улучшились показатели FMA. Показатели WMFT и инвалидности руки, плеча и кисти (DASH) не улучшились.
Вмешательство длилось 8–10 сеансов по 45–60 минут в течение 2,5 недель. Во время каждой сессии участники делали минимум 500 повторений и, возможно, до 800 повторений.Одно повторение может быть движением вверх-вниз, движением влево-вправо или (в большинстве случаев) комбинацией того и другого (например, перемещение курсора из центра в правый верхний угол экрана). После вмешательства значительно улучшились показатели FMA. Показатели WMFT и инвалидности руки, плеча и кисти (DASH) не улучшились.
Руль Able-X (включая CyWee Z) можно приобрести на сайте http://www.im-able.com/.
3.2. Роботизированные устройства
3.2.1. H-O-H
Система «Рука-Объект-Рука» (H-O-H) (см. рис. 7) была одним из первых двусторонних тренажеров, которые были внедрены в реабилитацию после инсульта [19].Это конкретное роботизированное тренировочное устройство было представлено как введение в разработку более сложных роботизированных вспомогательных устройств для постинсультной реабилитации верхних конечностей. В системе H-O-H обе руки помещаются в две жесткие ручки, которые ограничивают движения пациента в сгибании и разгибании вокруг запястий, то есть в одной степени свободы (DOF) для каждой руки, которые должны быть скоординированы. Между дистальными частями рукояток помещается карандашообразный предмет длиной 17,5 см, состоящий из двух крепежных винтов, прикрепленных к обеим сторонам датчика силы.Роботизированная помощь состоит из мотора с компьютерным управлением, установленного под одной из рукояток. Система способна частично или полностью заменять одну руку в двух задачах: ритмичное перемещение предмета слева направо и наоборот (т. е. параллельные движения рук) и сжимание.
В системе H-O-H обе руки помещаются в две жесткие ручки, которые ограничивают движения пациента в сгибании и разгибании вокруг запястий, то есть в одной степени свободы (DOF) для каждой руки, которые должны быть скоординированы. Между дистальными частями рукояток помещается карандашообразный предмет длиной 17,5 см, состоящий из двух крепежных винтов, прикрепленных к обеим сторонам датчика силы.Роботизированная помощь состоит из мотора с компьютерным управлением, установленного под одной из рукояток. Система способна частично или полностью заменять одну руку в двух задачах: ритмичное перемещение предмета слева направо и наоборот (т. е. параллельные движения рук) и сжимание.
Несмотря на то, что система H-O-H была рекомендована для тренировки верхних конечностей после инсульта, до настоящего времени не сообщалось о клинических результатах, и система не доступна в продаже.
3.2.2. Реабилитационный бимануальный лифтинг
Реабилитационный бимануальный лифтинг (см. рис. 8) представляет собой соединение с двумя степенями свободы, которое отражает динамику бимануального подъема [31]. Одно из двух звеньев состоит из предмета, который нужно поднять двумя ручками, а другое звено обеспечивает как измерение вертикального положения предмета, так и помощь, когда сила одной руки недостаточна или недостаточна. Управляемый компьютером двигатель, расположенный рядом с локтем и прикрепленный к звену рядом с предплечьем наиболее поврежденной стороны, регулирует подъемную силу наиболее поврежденной верхней конечности, прикладывая крутящий момент к управляемому звену, когда звено, которое нужно поднять, наклонено.Наклон измеряется потенциометром, расположенным рядом с подшипником между двумя звеньями. Бимануальный подъемный реабилитационный аппарат способен частично или полностью заменить усилие одной верхней конечности, например, при подъеме подноса в столовой с чашкой кофе.
рис. 8) представляет собой соединение с двумя степенями свободы, которое отражает динамику бимануального подъема [31]. Одно из двух звеньев состоит из предмета, который нужно поднять двумя ручками, а другое звено обеспечивает как измерение вертикального положения предмета, так и помощь, когда сила одной руки недостаточна или недостаточна. Управляемый компьютером двигатель, расположенный рядом с локтем и прикрепленный к звену рядом с предплечьем наиболее поврежденной стороны, регулирует подъемную силу наиболее поврежденной верхней конечности, прикладывая крутящий момент к управляемому звену, когда звено, которое нужно поднять, наклонено.Наклон измеряется потенциометром, расположенным рядом с подшипником между двумя звеньями. Бимануальный подъемный реабилитационный аппарат способен частично или полностью заменить усилие одной верхней конечности, например, при подъеме подноса в столовой с чашкой кофе.
Как и в случае с системой H-O-H, отсутствуют отчеты о клинических испытаниях реабилитационного бимануального подъемного устройства, а само устройство не имеется в продаже.
3.2.3. MIME
Усилитель движения зеркального изображения (MIME, [32]) представляет собой робот-манипулятор с 6 степенями свободы (PUMA 560, Stäubli Inc.), оборудованные исполнительными механизмами для приложения усилий в целенаправленных движениях (см. рис. 9). Система MIME фокусируется на функции плеч и локтей. Наиболее пораженное предплечье и кисть фиксируются индивидуальной шиной, которая ограничивает движение запястья и кисти и прикрепляется к концевому эффектору. Менее пораженная верхняя конечность фиксируется аналогичной шиной, прикрепленной к дигитайзеру положения. 6 степеней свободы робота позволяют расположить предплечье в большом диапазоне положений, что позволяет пациенту практиковать довольно сложные трехмерные модели движений.6-осевой датчик измеряет силы и крутящий момент между наиболее пораженной верхней конечностью и роботом. MIME поддерживает четыре режима движения с помощью робота. В бимануальном режиме пациенту предлагается выполнять бимануальные зеркальные движения, в то время как робот помогает наиболее пораженной верхней конечности, непрерывно перемещая наиболее пораженную верхнюю конечность в положение зеркального отражения контралатерального предплечья. Пассивный режим, режим с активной помощью и активный режим сопротивления являются односторонними режимами тренировки.
Пассивный режим, режим с активной помощью и активный режим сопротивления являются односторонними режимами тренировки.
Система MIME использовалась в трех рандомизированных клинических испытаниях (РКИ). В первом РКИ [33] эффекты системы MIME сравнивались с неразрушающим контролем верхней конечности у пациентов с хроническим инсультом. Всего 27 пациентов получили 24 одночасовых сеанса терапии в течение 2 месяцев. Терапевт, ослепленный групповым заданием, оценивал результаты по FMA, функциональной независимости (FIM) и биомеханическим показателям силы и кинематики достижения. После 2 месяцев тренировок в группе, получавшей лечение с помощью системы MIME, были более значительные улучшения в проксимальной части движения FMA, больший прирост проксимальной силы и большее увеличение досягаемости, чем в группе, получавшей NDT.Разница FMA между группами исчезла через 6 месяцев наблюдения. Тем не менее, группа системы MIME показала более значительные улучшения в FIM через 6 месяцев наблюдения; разница, которой не было сразу после лечения. В этом РКИ использовались все четыре режима роботизированного движения, а это означает, что группа, получавшая лечение с помощью системы MIME, проводила примерно 12 минут каждого сеанса в двустороннем режиме и 25 минут в одностороннем режиме. Следовательно, неясно, какой тип обучения (двусторонний или односторонний) больше всего способствовал наблюдаемым улучшениям.
В этом РКИ использовались все четыре режима роботизированного движения, а это означает, что группа, получавшая лечение с помощью системы MIME, проводила примерно 12 минут каждого сеанса в двустороннем режиме и 25 минут в одностороннем режиме. Следовательно, неясно, какой тип обучения (двусторонний или односторонний) больше всего способствовал наблюдаемым улучшениям.
Во втором РКИ [34] были отобраны пациенты с инсультом в подострой фазе, которые были разделены на четыре группы. Одной группе была проведена НДТ, нацеленная на проксимальный отдел верхней конечности (), а трем группам было проведено лечение с помощью робота: двустороннее (), одностороннее () или комбинированное одностороннее и двустороннее (). Все группы получили 15 одночасовых сеансов лечения в течение 4 недель. По сравнению с группой NDT, только комбинированная односторонняя и двусторонняя (роботизированная) группа показала больший прирост в проксимальной FMA и шкале синергии оценки моторного статуса после лечения. Однако эта разница исчезла через 6 мес. Через 6 месяцев все улучшения во всех группах лечения были одинаковыми, за исключением того, что в односторонней группе наблюдалось большее улучшение дистальной FMA, чем в объединенной односторонней и двусторонней группе.
Однако эта разница исчезла через 6 мес. Через 6 месяцев все улучшения во всех группах лечения были одинаковыми, за исключением того, что в односторонней группе наблюдалось большее улучшение дистальной FMA, чем в объединенной односторонней и двусторонней группе.
В прошлом году были опубликованы результаты третьего РКИ с участием пациентов в период от 7 до 21 дня после инсульта [35]. Пятьдесят четыре пациента были рандомизированы в три группы, получавшие лечение в течение 3 недель. Группа с низкой дозой роботизированной помощи получила до 15 часов, а группа с высокой дозой роботизированной помощи — до 30 часов обучения с системой MIME во всех четырех режимах.Третья группа получила до 15 часов обычной тренировки верхних конечностей. После лечения группа с высокими дозами робота продемонстрировала больший прирост показателей FIM, чем группа с обычным обучением. Через 6 месяцев эта разница исчезла. Однако существовала значительная разница между группами с высокими и низкими дозами роботизированной помощи по модифицированной шкале Эшворта (MAS), причем у первых наблюдалось большее увеличение мышечного тонуса, чем у последних; разница, которая не присутствовала сразу после лечения.
Система MIME не продается.
3.2.4. ARCMIME
ARCMIME (см. рис. 10) был разработан в попытке разработать клинически жизнеспособное коммерческое устройство с такими же клиническими результатами, что и система MIME [36]. Структура ARCMIME состоит из алюминиевых профилей и линейных направляющих, на которых установлены шины для рук. Система была разработана таким образом, что ее можно было вручную настраивать и перенастраивать. Угол наклона можно отрегулировать на 85° от горизонтали, а два рычага с линейными направляющими можно поворачивать на 345° вокруг своих отдельных точек поворота.В отличие от системы MIME, которая позволяет перемещаться в 3D, ARCMIME позволяет перемещаться только по линейным слайдам.
Четыре пациента с инсультом и два здоровых человека выполняли задания с помощью системы ARCMIME, а также системы MIME для сравнения работы обеих систем [36]. Было проведено по десять проб каждого из четырех режимов на каждой из двух траекторий движения. Когда модели движения были согласованы, сила, направленная на цели паретичной конечностью, существенно не отличалась для двух систем.Из этих результатов был сделан вывод, что клинические улучшения, наблюдаемые с помощью системы MIME, могут быть воспроизведены с помощью системы ARCMIME.
Когда модели движения были согласованы, сила, направленная на цели паретичной конечностью, существенно не отличалась для двух систем.Из этих результатов был сделан вывод, что клинические улучшения, наблюдаемые с помощью системы MIME, могут быть воспроизведены с помощью системы ARCMIME.
Система ARCMIME не продается.
3.2.5. Braccio Di Ferro
Braccio di Ferro (см. рис. 11) представляет собой планарный манипуландум с двумя степенями свободы, приводимыми в действие двумя двигателями [37]. Рабочая плоскость может быть изменена с горизонтальной на вертикальную. Браччо ди Ферро может генерировать четыре типа сил: вспомогательное поле, упругое поле сопротивления, жесткую «стену» и вязкое поле.Этот тактильный робот был разработан в первую очередь для одностороннего использования. Однако, заменив ручку регулируемой по длине штангой, которая может свободно вращаться, Braccio di Ferro также можно использовать для двусторонней тренировки. Обороты стержня измеряются потенциометром.
Двусторонняя тренировка с Braccio di Ferro была протестирована на пациентах с хроническим инсультом. В двух технико-экономических исследованиях [38, 39] пациенты выполняли движения вперед и назад в Braccio di Ferro, создавая четыре типа сил, описанных выше.Цикл обучения состоял из пяти занятий продолжительностью от 2 до 3 недель, каждое занятие длилось не более 45 минут. У всех пациентов улучшилась работоспособность: движения стали быстрее, плавнее, точнее и требовали снижения уровня вспомогательной силы. Однако о клинических результатах применения этого устройства не сообщалось.
Braccio di Ferro не продается.
3.2.6. Двумануальный руль
Двуручный руль [40] имеет две активные степени свободы (см. рис. 12), обеспечивающие поступательные движения вперед и назад, а также вращательные движения рабочего органа вокруг оси, перпендикулярной направлению поступательного движения.Двуручный руль состоит из двух частей, каждая из которых закреплена на концевом эффекторе и независимо измеряет усилия, создаваемые каждой верхней конечностью, с помощью двух датчиков силы и крутящего момента с 6 степенями свободы. Весь руль поворачивается как руль и может активно сопротивляться движениям объекта. ЖК-экран установлен в верхней части руля, чтобы обеспечить визуальное представление виртуальной задачи. Задача испытуемого — отслеживать эталонный объект на экране, перемещая рабочий орган робота, который также отображается на экране трекером-объектом . В двустороннем режиме субъект держит руль обеими руками и должен координировать их действия, чтобы сохранить постоянную ориентацию объекта-трекера.
Весь руль поворачивается как руль и может активно сопротивляться движениям объекта. ЖК-экран установлен в верхней части руля, чтобы обеспечить визуальное представление виртуальной задачи. Задача испытуемого — отслеживать эталонный объект на экране, перемещая рабочий орган робота, который также отображается на экране трекером-объектом . В двустороннем режиме субъект держит руль обеими руками и должен координировать их действия, чтобы сохранить постоянную ориентацию объекта-трекера.
До настоящего времени не сообщалось о клинических испытаниях этого устройства, и оно не продается.
3.2.7. Bi-Manu-Track
Исследовательская группа, разработавшая Reha-Slide, также разработала Bi-Manu-Track [41]. Bi-Manu-Track — это компьютеризированный тренажер для рук с моторным приводом, который позволяет билатерально тренировать два типа движений: про- и супинацию предплечья, а также сгибание и разгибание запястья (см. рис. 13).Для переключения между схемами движения устройство можно наклонить на 90°. Bi-Manu-Track поддерживает три управляемых компьютером режима практики. В пассивно-пассивном режиме робот управляет обеими руками. В активно-пассивном режиме менее пораженная верхняя конечность активно перемещает рукоятку, в то время как робот направляет наиболее поврежденную верхнюю конечность. В активно-активном режиме активно работают обе руки, преодолевая начальное изометрическое сопротивление. Движения могут быть как зеркально-симметричными (синфазными), так и параллельными (противофазными).Амплитуда, скорость и сопротивления могут быть установлены индивидуально.
Bi-Manu-Track поддерживает три управляемых компьютером режима практики. В пассивно-пассивном режиме робот управляет обеими руками. В активно-пассивном режиме менее пораженная верхняя конечность активно перемещает рукоятку, в то время как робот направляет наиболее поврежденную верхнюю конечность. В активно-активном режиме активно работают обе руки, преодолевая начальное изометрическое сопротивление. Движения могут быть как зеркально-симметричными (синфазными), так и параллельными (противофазными).Амплитуда, скорость и сопротивления могут быть установлены индивидуально.
Bi-Manu-Track был впервые протестирован у 12 пациентов с хроническим инсультом [41]. В дополнение к текущей комплексной программе реабилитации пациенты ежедневно в течение 3 недель получали 15-минутную тренировку верхних конечностей во всех трех режимах Bi-Manu-Track в будние дни. После лечения по шкале MAS было выявлено значительное снижение мышечного тонуса запястья и пальцев. Однако баллы вернулись к значениям до лечения через 3 месяца наблюдения.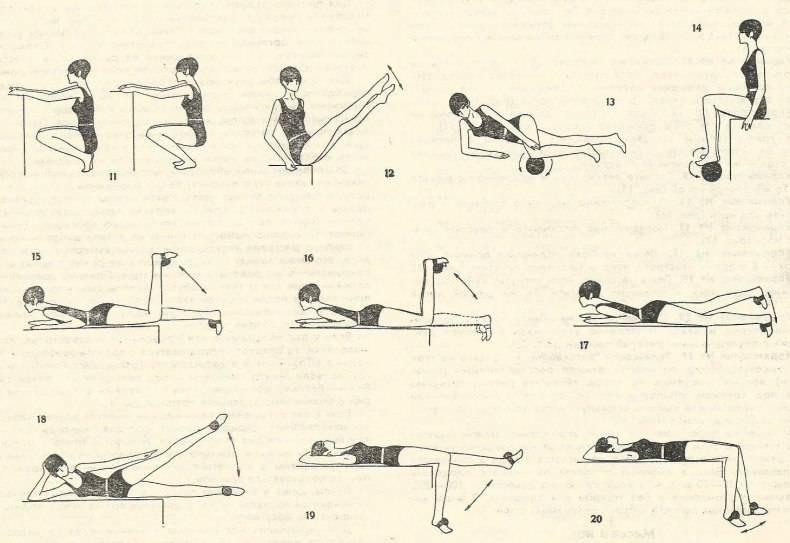 Другие показатели, такие как моторная оценка Rivermead, существенно не изменились.
Другие показатели, такие как моторная оценка Rivermead, существенно не изменились.
В РКИ эффекты лечения Bi-Manu-Track сравнивались с лечением электростимуляцией разгибателей запястья у пациентов с тяжелым гемипарезом [42]. В общей сложности 44 пациента в сроки от 4 до 8 недель после инсульта были рандомизированы в обе группы. Все пациенты тренировались по 20 минут каждый рабочий день в течение 6 недель. Группа Би-Ману-Трек выполняла 800 повторений за сеанс: 200 циклов запястья в пассивно-пассивном режиме и 200 в активно-пассивном режиме, 200 циклов предплечья в пассивно-пассивном режиме и 200 в активно-пассивном режиме.Этим пациентам также разрешалось выполнять от 25 до 50 повторений в активно-активном режиме. Группа электростимуляции практиковала 60–80 повторений разгибания запястья за сеанс. Сила мышц верхних конечностей и баллы FMA увеличились значительно больше в группе Bi-Manu-Track, чем в группе электростимуляции после лечения и через 3 месяца наблюдения.
В другом РКИ Bi-Manu-Track использовался для проверки эффекта билатеральной роботизированной тренировки с транскраниальной стимуляцией постоянным током (tDCS) [43]. В этом исследовании 96 пациентов с тяжелым поражением верхних конечностей через 3–8 недель после инсульта были рандомизированы на три группы. В течение 6 недель одна группа получала анодную стимуляцию пораженного полушария, а другая группа получала катодную стимуляцию противоположного полушария в течение 20 минут. Третья группа получила фиктивную стимуляцию. Во время стимуляции пациенты выполняли 400 повторений двух разных билатеральных движений с помощью Bi-Manu-Track. При обучении использовались пассивно-пассивный и активно-пассивный режимы.Тренировки Bi-Manu-Track и tDCS были дополнительными к текущей комплексной программе реабилитации, состоящей из ежедневных тренировок на эргометре, ежедневных 45 минут физиотерапии и 4 раза в неделю 30 минут трудотерапии. Все пациенты улучшились по FMA и BBT, но не было различий между группами после лечения и через 3 месяца наблюдения.
В этом исследовании 96 пациентов с тяжелым поражением верхних конечностей через 3–8 недель после инсульта были рандомизированы на три группы. В течение 6 недель одна группа получала анодную стимуляцию пораженного полушария, а другая группа получала катодную стимуляцию противоположного полушария в течение 20 минут. Третья группа получила фиктивную стимуляцию. Во время стимуляции пациенты выполняли 400 повторений двух разных билатеральных движений с помощью Bi-Manu-Track. При обучении использовались пассивно-пассивный и активно-пассивный режимы.Тренировки Bi-Manu-Track и tDCS были дополнительными к текущей комплексной программе реабилитации, состоящей из ежедневных тренировок на эргометре, ежедневных 45 минут физиотерапии и 4 раза в неделю 30 минут трудотерапии. Все пациенты улучшились по FMA и BBT, но не было различий между группами после лечения и через 3 месяца наблюдения.
Третье РКИ сравнило эффекты тренировки Bi-Manu-Track с активной контрольной терапией с подобранной дозой [44].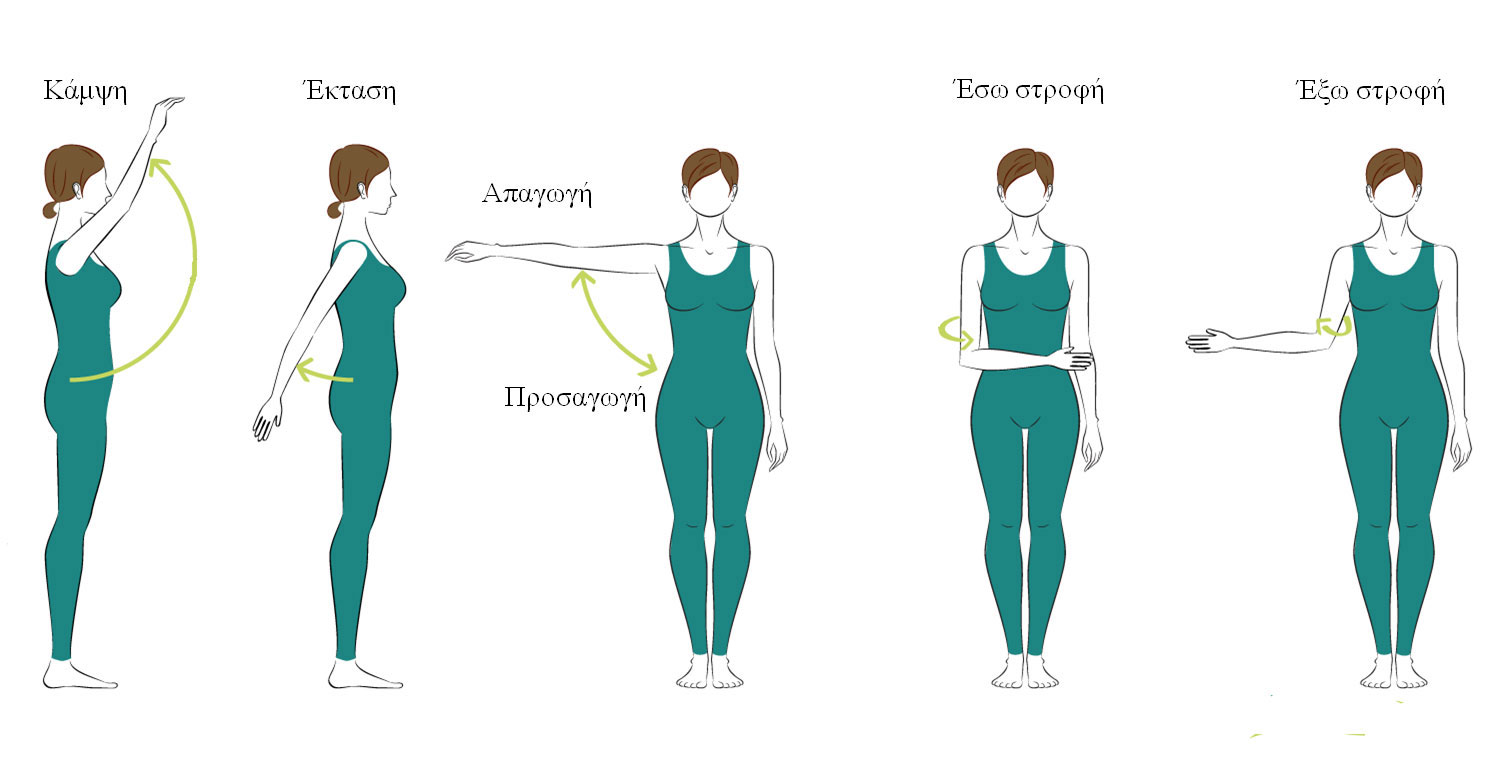 Две группы по 10 пациентов с хроническим инсультом получали по 90–105 минут тренировок каждый рабочий день в течение 4 недель.Группа Би-Ману-Трек выполняла 300-400 повторений предплечья в пассивно-пассивном режиме, 300-400 в активно-пассивном режиме, 150-200 повторений предплечья и 150-200 повторений запястья в активно-активном режиме в течение одного часа. сессия. Для пациентов с активной про- и супинацией предплечья или активным сгибанием и разгибанием запястья вводили четвертый режим (пассивно-активный) с активным выполнением тренировочных циклов наиболее пораженной верхней конечностью. К обучению Bi-Manu-Track была добавлена компьютерная программа, чтобы пациенты получали немедленную визуальную обратную связь о действиях или усилии, которые они применяли во время тренировки.После роботизированной тренировки пациенты в течение 15 минут выполняли различные функциональные действия. Контрольная группа получила протокол тренировок с подобранной дозой, включая NDT, с акцентом на тренировку функциональных задач.
Две группы по 10 пациентов с хроническим инсультом получали по 90–105 минут тренировок каждый рабочий день в течение 4 недель.Группа Би-Ману-Трек выполняла 300-400 повторений предплечья в пассивно-пассивном режиме, 300-400 в активно-пассивном режиме, 150-200 повторений предплечья и 150-200 повторений запястья в активно-активном режиме в течение одного часа. сессия. Для пациентов с активной про- и супинацией предплечья или активным сгибанием и разгибанием запястья вводили четвертый режим (пассивно-активный) с активным выполнением тренировочных циклов наиболее пораженной верхней конечностью. К обучению Bi-Manu-Track была добавлена компьютерная программа, чтобы пациенты получали немедленную визуальную обратную связь о действиях или усилии, которые они применяли во время тренировки.После роботизированной тренировки пациенты в течение 15 минут выполняли различные функциональные действия. Контрольная группа получила протокол тренировок с подобранной дозой, включая NDT, с акцентом на тренировку функциональных задач. Группа Bi-Manu-Track значительно увеличила баллы FMA, коэффициент активности верхних конечностей (оценивался с помощью акселерометров), количество и качество использования верхних конечностей (оценивался с помощью MAL) и бимануальные способности (оценивался с помощью опросника ABILHAND). Не было никаких различий в FIM, и о последующей оценке не сообщалось.
Группа Bi-Manu-Track значительно увеличила баллы FMA, коэффициент активности верхних конечностей (оценивался с помощью акселерометров), количество и качество использования верхних конечностей (оценивался с помощью MAL) и бимануальные способности (оценивался с помощью опросника ABILHAND). Не было никаких различий в FIM, и о последующей оценке не сообщалось.
В пилотном исследовании с участием 21 пациента в хронической фазе после инсульта односторонние и двусторонние роботизированные тренировки с Bi-Manu-Track сравнивались друг с другом и со стандартной реабилитацией верхних конечностей [45]. Двусторонняя группа Bi-Manu-Track прошла обучение, аналогичное описанному выше [44]. Односторонняя группа Bi-Manu-Track получила модифицированный протокол и тренировала только наиболее пораженную верхнюю конечность. В активно-активном режиме наиболее пораженная верхняя конечность должна была перемещать рукоятку против сопротивления (установленного терапевтом) на протяжении всего движения (в отличие от только преодоления начального сопротивления). Контрольная группа получала подобранную по дозе терапию с упражнениями, включающими весовую нагрузку, растяжку, укрепление, одностороннюю и двустороннюю координацию и мелкую моторику. Группа одностороннего Bi-Manu-Track улучшилась больше по общему баллу FMA, проксимальному суббаллу и дистальной мышечной силе, чем двусторонняя Bi-Manu-Track и контрольная группа. Тем не менее, в группе билатерального Би-Ману-Трека наблюдался больший прирост проксимальной мышечной силы, чем в группе одностороннего Би-Ману-Трек и в контрольной группе. Не было никаких различий по MAS, и о последующей оценке не сообщалось.
Контрольная группа получала подобранную по дозе терапию с упражнениями, включающими весовую нагрузку, растяжку, укрепление, одностороннюю и двустороннюю координацию и мелкую моторику. Группа одностороннего Bi-Manu-Track улучшилась больше по общему баллу FMA, проксимальному суббаллу и дистальной мышечной силе, чем двусторонняя Bi-Manu-Track и контрольная группа. Тем не менее, в группе билатерального Би-Ману-Трека наблюдался больший прирост проксимальной мышечной силы, чем в группе одностороннего Би-Ману-Трек и в контрольной группе. Не было никаких различий по MAS, и о последующей оценке не сообщалось.
Та же исследовательская группа провела РКИ с участием пациентов с хроническим инсультом, сравнивая двустороннюю тренировку верхних конечностей Bi-Manu-Track с двусторонней тренировкой верхних конечностей под руководством терапевта и контрольным лечением [46]. Все группы получали лечение по 90–105 минут за сеанс, 5 сеансов в неделю, в течение 4 недель. Двусторонняя группа Bi-Manu-Track прошла обучение, аналогичное описанному выше [44]. Группа терапевтов по билатеральному обучению верхних конечностей практиковала различные билатеральные функциональные задачи под наблюдением терапевтов один на один.Лечение в контрольной группе включало обычные терапевтические мероприятия для верхних конечностей, односторонние и двусторонние мелкомоторные задачи и компенсаторную практику функциональных задач. В FMA группа билатеральной тренировки верхних конечностей под руководством терапевта показала более высокие баллы дистальных отделов, чем контрольная группа. По Шкале воздействия инсульта (SIS) группа Bi-Manu-Track показала лучшую подшкалу силы, домен физической функции и общие баллы, чем контрольная группа. Кроме того, кинематические переменные различались между тремя группами.Группа двусторонней тренировки верхних конечностей под руководством терапевта продемонстрировала значительно лучшую временную эффективность и плавность, более прямые движения туловища и меньшую компенсацию туловища по сравнению с группой Bi-Manu-Track и контрольной группой.
Группа терапевтов по билатеральному обучению верхних конечностей практиковала различные билатеральные функциональные задачи под наблюдением терапевтов один на один.Лечение в контрольной группе включало обычные терапевтические мероприятия для верхних конечностей, односторонние и двусторонние мелкомоторные задачи и компенсаторную практику функциональных задач. В FMA группа билатеральной тренировки верхних конечностей под руководством терапевта показала более высокие баллы дистальных отделов, чем контрольная группа. По Шкале воздействия инсульта (SIS) группа Bi-Manu-Track показала лучшую подшкалу силы, домен физической функции и общие баллы, чем контрольная группа. Кроме того, кинематические переменные различались между тремя группами.Группа двусторонней тренировки верхних конечностей под руководством терапевта продемонстрировала значительно лучшую временную эффективность и плавность, более прямые движения туловища и меньшую компенсацию туловища по сравнению с группой Bi-Manu-Track и контрольной группой. В группе Bi-Manu-Track наблюдалось большее сгибание плеча по сравнению с контрольной и двусторонней тренировкой верхних конечностей под руководством терапевта.
В группе Bi-Manu-Track наблюдалось большее сгибание плеча по сравнению с контрольной и двусторонней тренировкой верхних конечностей под руководством терапевта.
В настоящее время проводится РКИ с участием пациентов в хронической фазе после инсульта (6–24 месяца) (http://www.clinicaltrials.gov/, NCT01525979). В этом РКИ с 5 группами лечение Bi-Manu-Track, используемое в одностороннем и двустороннем порядке, сравнивается с односторонней, двусторонней или комбинированной тренировкой верхних конечностей, связанной с задачей.
Bi-Manu-Track можно приобрести в Reha-Stim, Берлин, Германия.
3.2.8. Ручное роботизированное реабилитационное устройство
В 2009 г. Rashedi et al. [47] сообщили о проектировании и разработке другого ручного роботизированного реабилитационного устройства (см. рис. 14). Как и Bi-Manu-Track, он позволяет билатерально тренировать два типа движений: про- и супинацию предплечья, а также сгибание и разгибание запястья.Для устройства были запрограммированы три разных режима: пассивный режим, в котором скорость и диапазон движения можно контролировать отдельно, активный бимануальный режим, в котором верхняя конечность с меньшими нарушениями перемещает верхнюю конечность с наибольшим повреждением в зеркальном образе движения, и активный режим, в котором каждая сторона могла двигаться независимо, преодолевая регулируемое сопротивление.
О клинических испытаниях этого устройства не сообщалось, и оно не продается.
3.2.9. BFIAMT
Двусторонний тренажер изокинетических движений рук, индуцированных силой (BFIAMT, см. рис. 15), представляет собой роботизированное устройство с 2 серводвигателями, 2 параллельными роликовыми направляющими, 2 рукоятками, 2 желобами для предплечий, 2 тензодатчиками и панелью управления. 48].BFIAMT напоминает ранее описанный Reha-Slide (рукоятки можно перемещать вперед и назад по параллельным направляющим), хотя в BFIAMT серводвигатели могут оказывать помощь или сопротивление во время движения, а тензодатчики обнаруживают тянущие и толкающие силы. Устройство поддерживает четыре различных режима лечения: двустороннее пассивное, двустороннее активно-пассивное, двустороннее реципрокное и двустороннее симметричное движение верхних конечностей.
BFIAMT использовали в одном когортном исследовании у пациентов с хроническим инсультом [48].Пациенты следовали тренировочной программе, состоящей из 40-минутных тренировок 3 раза в неделю в течение 8 недель. Сеансы лечения состояли из двух частей. В части 1 (30 минут) пациенты выполнили 3 последовательных подхода по 20 повторений билатеральных симметричных движений руками и ногами с помощью BFIAMT. Перед лечением определяли изометрическую максимальную силу толчка и тяги руки субъекта как в менее, так и в наиболее пораженных верхних конечностях. Заданные требуемые силы для трех подходов составляли 10%, 20% и 10% от максимальных сил толкания и тяги пораженной и здоровой рук.Кроме того, испытуемых проинструктировали выполнять двусторонние симметричные толчковые и тянущие движения в удобном велосипедном темпе; наиболее предпочтительная частота циклирования составляла 0,1 Гц. Во время обучения пациенту в режиме реального времени демонстрировались двусторонние усилия толчка и тяги в виде визуальной обратной связи. Как правило, испытуемые должны были продолжать прилагать требуемые силы с обеих сторон в течение 10 секунд, чтобы выполнить плавное движение толкания и вытягивания. Во второй части лечения (10 минут) пациенты получали обычную реабилитационную программу, направленную на лечение, которое не обеспечивало симметричных двусторонних движений и тренировок с отягощениями верхних конечностей.
Сеансы лечения состояли из двух частей. В части 1 (30 минут) пациенты выполнили 3 последовательных подхода по 20 повторений билатеральных симметричных движений руками и ногами с помощью BFIAMT. Перед лечением определяли изометрическую максимальную силу толчка и тяги руки субъекта как в менее, так и в наиболее пораженных верхних конечностях. Заданные требуемые силы для трех подходов составляли 10%, 20% и 10% от максимальных сил толкания и тяги пораженной и здоровой рук.Кроме того, испытуемых проинструктировали выполнять двусторонние симметричные толчковые и тянущие движения в удобном велосипедном темпе; наиболее предпочтительная частота циклирования составляла 0,1 Гц. Во время обучения пациенту в режиме реального времени демонстрировались двусторонние усилия толчка и тяги в виде визуальной обратной связи. Как правило, испытуемые должны были продолжать прилагать требуемые силы с обеих сторон в течение 10 секунд, чтобы выполнить плавное движение толкания и вытягивания. Во второй части лечения (10 минут) пациенты получали обычную реабилитационную программу, направленную на лечение, которое не обеспечивало симметричных двусторонних движений и тренировок с отягощениями верхних конечностей. Эта программа включала в себя упражнения на диапазон движений, нормализацию мышечного тонуса, компенсаторную активность повседневных тренировок, тренировку постурального контроля и коррекцию походки. После лечения и через 8 недель наблюдения функция верхних конечностей (оцененная с помощью FMA, MAS и теста рук Френчея) значительно улучшилась, а также сила захвата, толкания и тяги, а также кинематика.
Эта программа включала в себя упражнения на диапазон движений, нормализацию мышечного тонуса, компенсаторную активность повседневных тренировок, тренировку постурального контроля и коррекцию походки. После лечения и через 8 недель наблюдения функция верхних конечностей (оцененная с помощью FMA, MAS и теста рук Френчея) значительно улучшилась, а также сила захвата, толкания и тяги, а также кинематика.
BFIAMT не продается.
3.2.10. Бимануально-скоординированная система обучения
Бимануально-скоординированная система обучения представляет собой систему ведущий-ведомый, сконфигурированную с двумя идентичными терминалами, по одному на каждую конечность [49].Две регулируемые по длине рукоятки для сгибания-разгибания в локтевом суставе соединены с терминалами, а два датчика крутящего момента и усилитель сигнала крутящего момента применяются для измерения терминальных крутящих моментов и проверки соотношения крутящего момента между двумя терминалами. Кроме того, система оснащена двумя идентичными двигателями и редукторами. Рабочие состояния двух моторов определяются силами, прикладываемыми верхними конечностями к двум клеммам. Терминал, получающий большую силу, служит для генерации состояния и ведет себя как главный терминал, в то время как другой терминал работает в электродвижущем состоянии и ведет себя как подчиненный терминал.Система поддерживает три режима обучения: (i) пассивный режим, при котором верхняя конечность с меньшими нарушениями приводит в движение наиболее поврежденную верхнюю конечность (которая движется пассивно), (ii) режим с активной помощью, когда верхняя конечность с меньшими нарушениями помогает верхней конечности с наибольшим повреждением. конечности для выполнения желаемых движений, и (iii) активно-сопротивляющий режим, когда менее пораженная верхняя конечность сопротивляется движению наиболее поврежденной верхней конечности (здесь двигатель, управляемый наиболее поврежденной верхней конечностью, ведет себя как ведущий, в то время как двигатель, управляемый менее пораженная верхняя конечность ведет себя как ведомая).
Рабочие состояния двух моторов определяются силами, прикладываемыми верхними конечностями к двум клеммам. Терминал, получающий большую силу, служит для генерации состояния и ведет себя как главный терминал, в то время как другой терминал работает в электродвижущем состоянии и ведет себя как подчиненный терминал.Система поддерживает три режима обучения: (i) пассивный режим, при котором верхняя конечность с меньшими нарушениями приводит в движение наиболее поврежденную верхнюю конечность (которая движется пассивно), (ii) режим с активной помощью, когда верхняя конечность с меньшими нарушениями помогает верхней конечности с наибольшим повреждением. конечности для выполнения желаемых движений, и (iii) активно-сопротивляющий режим, когда менее пораженная верхняя конечность сопротивляется движению наиболее поврежденной верхней конечности (здесь двигатель, управляемый наиболее поврежденной верхней конечностью, ведет себя как ведущий, в то время как двигатель, управляемый менее пораженная верхняя конечность ведет себя как ведомая).
О клинических испытаниях этого устройства не сообщалось, и оно не продается.
3.2.11. Driver’s SEAT
Driver’s Simulation Environment для Arm Therapy (Driver’s SEAT; см. рис. 16) был разработан в качестве прототипа реабилитационного устройства [50]. Сиденье водителя — это роботизированное устройство с одной степенью свободы, серводвигателем и разделенным рулевым колесом с регулируемым наклоном, которое измеряет характеристики, связанные с положением и усилием. Раздельное рулевое колесо взаимодействует с аппаратным обеспечением симулятора вождения, которое создает реалистичные графические дорожные сцены и собирает данные, связанные с динамикой рулевого управления.Конфигурация рулевого колеса измеряет силы, создаваемые каждым рычагом независимо. Устройство допускает три режима работы: пассивное движение, активное рулевое управление и обычное рулевое управление. В режиме пассивного движения менее пораженная верхняя конечность выполняет рулевое управление, а наиболее пораженная верхняя конечность перемещается пассивно с помощью сервомеханизма. В режиме активного рулевого управления испытуемым предлагается управлять наиболее поврежденной верхней конечностью, расслабляя контралатеральную верхнюю конечность. В этом режиме сервомеханизм служит для поощрения управления наиболее пораженной верхней конечностью, в то время как задействование менее поврежденной верхней конечности активно препятствует частичному ограничению.Это сдерживание вызывается с помощью сигналов корректирующей силы, определяемых как усиление колеса пропорционально касательной силе менее пораженной верхней конечности на ободе колеса. В обычном режиме рулевого управления испытуемым предлагается практиковать скоординированное вождение и улучшать симметрию своих усилий, активно управляя обеими верхними конечностями.
В режиме активного рулевого управления испытуемым предлагается управлять наиболее поврежденной верхней конечностью, расслабляя контралатеральную верхнюю конечность. В этом режиме сервомеханизм служит для поощрения управления наиболее пораженной верхней конечностью, в то время как задействование менее поврежденной верхней конечности активно препятствует частичному ограничению.Это сдерживание вызывается с помощью сигналов корректирующей силы, определяемых как усиление колеса пропорционально касательной силе менее пораженной верхней конечности на ободе колеса. В обычном режиме рулевого управления испытуемым предлагается практиковать скоординированное вождение и улучшать симметрию своих усилий, активно управляя обеими верхними конечностями.
В эксперименте с участием 8 пациентов с хроническим инсультом и 8 здоровых испытуемых сравнивались эффекты рулевого управления с (режим активного рулевого управления) и без (нормальное рулевое управление) силовыми сигналами [51].У пациентов с инсультом силовые сигналы значительно увеличивали продуктивную крутящую активность в направлениях руления вверх и против силы тяжести с наиболее поврежденной верхней конечностью.
Сиденье водителя не продается.
3.2.12. Адаптивное бимануальное роботизированное обучение
Trlep et al. разработали еще одну роботизированную систему, предназначенную для задач рулевого управления [52]. В этой системе используется роботизированная система HapticMASTER (FCS Control Systems, Нидерланды). Существующие 3 степени свободы HapticMASTER расширены за счет дополнительного активного шарнира на конце робота, что позволяет имитировать активное рулевое колесо.Двуручные рули, установленные на рабочем органе робота, независимо измеряют силы, создаваемые каждой рукой. Руль поворачивается, как руль, и может активно сопротивляться рулю субъекта (см. рис. 17). Обе верхние конечности поддерживаются пассивным механизмом компенсации гравитации, испытуемые могут выполнять задачи в среде виртуального симулятора полета. Робот запрограммирован на ограничение движения руля траекторией трех режимов упражнений: (i) вертикальное движение с активным сгибанием плеча с разогнутым локтем, (ii) горизонтальное движение с активным разгибанием локтя и вытягиванием плеча, и (iii) изолированное активное разгибание локтя.Во время упражнений испытуемых побуждают использовать наиболее поврежденную верхнюю конечность, несмотря на сопротивление, создаваемое роботом. Если верхняя конечность с наибольшим повреждением не может работать должным образом, силы, прилагаемые менее поврежденной верхней конечностью, уменьшаются с использованием адаптивного усиления, чтобы стимулировать использование верхней конечности с наибольшим повреждением.
Адаптивная бимануальная роботизированная система обучения была протестирована на 4 пациентах с хроническим инсультом [52]. Все пациенты получили 8 тренировок; 2 тренировки в неделю в течение 4 недель.Каждая тренировка состояла из трех упражнений, описанных ранее. Каждое упражнение сначала выполнялось односторонне с использованием менее пораженной верхней конечности, затем в двустороннем режиме и, наконец, как одностороннее упражнение с наиболее пораженной верхней конечностью. В каждом режиме тренировки выполняли по десять стимулированных движений. Обучение трем режимам упражнений привело к улучшению выполнения задач в двусторонних и односторонних задачах ориентации и отслеживания положения. О результатах клинических испытаний не сообщалось.
Адаптивная бимануальная роботизированная система обучения не продается.
3.2.13. Виртуальное пианино
Виртуальное пианино (см. рис. 18) представляет собой роботизированную/виртуальную систему, предназначенную для тренировки верхних конечностей у пациентов с инсультом [53]. Фортепиано виртуальной реальности обеспечивает визуальную, слуховую и тактильную обратную связь, сравнимую с реальным фортепиано, за счет использования экзоскелета, отражающего силу (CyberGrasp). Отслеживание верхних конечностей (с помощью CyberGlove) позволяет пациентам тренировать руку и кисть как единое целое.Фортепиано виртуальной реальности включает в себя песни и гаммы, которые можно исполнять одной или двумя верхними конечностями. Адаптивная тактильная помощь доступна для более вовлеченных пациентов, а алгоритм регулирует сложность задачи пропорционально производительности пациента.
Виртуальное пианино было испытано на четырех пациентах с хроническим инсультом [53]. У всех пациентов улучшилось время выполнения и точность нажатия клавиш, а у 3 пациентов улучшилась способность двигать каждым пальцем по отдельности после 8-9 дней тренировок в течение 90 минут.Два пациента улучшили тест Джебсена на функцию кисти, а 3 из 4 пациентов улучшили результаты WMFT.
Виртуальное пианино не продается. CyberGrasp доступен в VRLOGIC GmbH, Дибург, Германия, и CyberGlove Systems LLC, Сан-Хосе, Калифорния, США.
3.2.14. EXO-UL7
EXO-UL7 — это экзоскелетный робот с двумя руками и 7 степенями свободы в каждой руке (см. рис. 19). Семь одноосных вращательных суставов отвечают за отведение-приведение плеча, сгибание-разгибание и внутреннюю-наружную ротацию, сгибание-разгибание в локтевом суставе, пронацию-супинацию запястья, сгибание-разгибание и лучелоктевую девиацию [55].Четыре шестиосевых датчика силы/крутящего момента прикреплены к плечу, предплечью, кисти и кончику экзоскелета для взаимодействия человека с машиной. Вместе с управляющим ПК и игровым ПК пациенты могут манипулировать виртуальными объектами в видеоиграх, получая при этом тактильную обратную связь [54]. Робот может использоваться для одностороннего и двустороннего обучения. В одностороннем режиме наиболее пораженная верхняя конечность поддерживается слабой вспомогательной силой в направлении цели. В билатеральном режиме желаемые суставные углы зеркально симметрично передаются от менее пораженной верхней конечности (ведущей) к наиболее пораженной верхней конечности (ведомой).
В небольшом РКИ 15 пациентов с хроническим инсультом были рандомизированы в три группы: односторонняя роботизированная обучающая группа, двусторонняя роботизированная обучающая группа и группа обычного ухода [54]. Сообщались только результаты обеих групп обучения роботов. Обе группы обучения роботов получали два 90-минутных занятия в неделю в течение 6 недель. В каждом сеансе разыгрывалась разная комбинация из восьми видеоигр, взаимодействующих с EXO-UL7. Результаты не показали существенной разницы между двумя группами обучения роботов в улучшении показателей FMA.Однако была существенная разница в кинематических переменных в пользу двустороннего роботизированного обучения.
EXO-UL7 не продается.
Краткий обзор механических билатеральных устройств для тренировки верхних конечностей представлен в таблице 1, а роботизированных устройств – в таблице 2. наиболее поврежденная верхняя конечность
(плечо и локоть)
2 одно групповые исследования (хронический) [20, 22]
1 RCT (хронический) [23]
(плечо и локоть)
(плечо, локоть и запястье)
1 РКИ (подострый) [26]
2 4 (the Rocker)
1 одногрупповое исследование (подострый и хронический) [27]
1 РКИ (хронический) [28]
(плечо, локоть и запястье)
4. ОбсуждениеВыше мы рассмотрели основные характеристики билатеральных устройств для тренировки верхних конечностей, которые были предложены в литературе, а также их потенциал для клинического применения в зависимости от имеющихся в настоящее время клинических данных. и коммерческая доступность. Хотя устройства, обсуждаемые в этой статье, вряд ли представляют собой полный спектр билатеральных устройств для тренировки верхних конечностей для постинсультной реабилитации, статья является репрезентативной в том смысле, что она охватывает наиболее известные устройства и дает точный, современный обзор потенциал и трудности, связанные с интеграцией механических и роботизированных устройств в постинсультную реабилитацию, включая их доступность. Хотя обсуждаемые устройства объединяет то, что все они были разработаны специально для двусторонней тренировки верхних конечностей или, по крайней мере, поддерживают двустороннюю тренировку верхних конечностей как один из основных режимов тренировки, они значительно различаются по своей механической и электромеханической сложности. В то время как механические характеристики некоторых устройств, таких как BATRAC (Tailwind), Reha-Slide и Reha-Slide Duo, относительно просты, другие включают в себя сложные формы роботизированного управления и сложные инженерные решения.Более простые устройства, очевидно, легче применять в реабилитации, поскольку они относительно просты в эксплуатации и имеют меньшую стоимость, чем устройства, использующие большое количество технического оборудования для более точного измерения и контроля движений. Важно отметить, что в той мере, в какой имеются убедительные клинические результаты для устройств для двусторонней тренировки плеча, нет очевидных признаков или тенденций того, что более сложные устройства будут иметь большую клиническую эффективность, чем более простые и менее дорогостоящие решения. Как видно из Таблиц 1 и 2, имеющиеся данные о клинической эффективности билатеральных устройств для тренировки плеча в постинсультной реабилитации довольно ограничены. Клинические результаты не были представлены для 9 из 20 обсуждаемых устройств. Более того, доказательный статус показателей клинических исходов, о которых сообщалось для других 8 устройств, ограничен из-за ограничений дизайна и других методологических недостатков. Среди них следующие. Прежде всего, было проведено лишь несколько РКИ для проверки эффективности обсуждаемых устройств.В соответствии с общепринятой иерархией доказательств наиболее надежные данные получены из метаанализов в систематических обзорах, за которыми следуют данные РКИ, когортных исследований, а затем тематических исследований. Положительные результаты тематических исследований и когортных исследований, обсуждаемых в этой статье, лишь указывают на то, что конкретное устройство может быть полезным в реабилитации. Во многих случаях сравнение с другими соответствующими формами лечения отсутствует, поэтому невозможно делать какие-либо заявления об относительном превосходстве или неполноценности обучения на конкретном устройстве по сравнению с другими вмешательствами.Во-вторых, некоторые РКИ, о которых сообщалось, могут быть предвзятыми, поскольку в них не учитывался объем тренировок. Например, количество времени, затрачиваемое на тренировку в группе APBT, было больше, чем в контрольной группе [28], а количество повторений движений запястья в группе Bi-Manu-Track намного превышало количество повторений в электрической группе. группа стимуляции [41]. Конечно, по общему признанию, это несоответствие между группами связано с одним из преимуществ, предлагаемых механическими или роботизированными тренажерами, а именно с тем, что количество повторений движений может быть значительно увеличено по сравнению с обычными программами лечения.В-третьих, в нескольких исследованиях, в которых были обнаружены положительные клинические результаты, невозможно приписать наблюдаемые эффекты двусторонней тренировке как таковой, поскольку протоколы тренировок также включали одностороннюю тренировку. Точно так же невозможно сказать, были ли эффекты связаны с тренировкой проксимальных или более дистальных частей наиболее пораженной руки, с активной, пассивной или вспомогательной тренировкой наиболее пораженной конечности, или с выполнением синфазной или противофазной координации. моделей, потому что ни один из этих аспектов не контролировался систематически при разработке рассматриваемых исследований. На основании обсуждаемых клинических результатов и результатов предшествующих мета-анализов [13–18] двусторонняя тренировка верхних конечностей (с тренажерами или без них), по-видимому, не менее эффективна, чем альтернативные формы лечения, с тем дополнительным преимуществом, что тренажеры позволяют увеличить интенсивность и частоту тренировок, а также дают возможность тренироваться самостоятельно [1–4]. Однако требуется гораздо больше исследований, чем было проведено до сих пор, чтобы адаптировать лечение к конкретным потребностям и характеристикам отдельных пациентов.Во-первых, существует определенная потребность в РКИ, направленных конкретно и систематически на тестирование различных аспектов билатерального тренинга: бимануального и мономануального, проксимального и дистального, активного и пассивного или вспомогательного движения, а также их эффективности у пациентов с (под)острым и хроническим инсультом. Во-вторых, еще более важно точно знать, чему пациенты учатся при билатеральной тренировке верхних конечностей и какие механизмы лежат в основе этого процесса обучения. Это означает, что измерения изменений в клинических исходах недостаточно, но необходимо также учитывать показатели нервной реорганизации (см. также [23]), кинематики и времени, как, например, в исследовании ULTRA-stroke [21]. .В нынешнем виде мы можем сделать очень мало выводов об этих аспектах из существующей литературы. В заключение можно сделать вывод, что принцип билатерального обучения и его перспективы для восстановления двигательной функции верхних конечностей вызвали не только теоретически обоснованные исследования в этой области, но и различные многообещающие инновации в области механики. и роботизированные устройства, предназначенные специально или, по крайней мере, частично для двусторонней тренировки верхних конечностей.Однако первоначальные клинические результаты еще не достигли такого уровня, чтобы рассматриваемые устройства и концепции, на которых они основаны, были твердо установлены. Скорее дело в том, что первоначальные клинические результаты не исключают возможности того, что концепция билатерального обучения и сопутствующие механические и роботизированные устройства могут обеспечить полезное расширение доступных в настоящее время форм терапии. Однако, чтобы на самом деле продемонстрировать их ценность, необходимы дополнительные исследования с адекватными экспериментальными планами с подобранными дозами и достаточной статистической мощностью.В нынешнем виде следует избегать распространения технологических устройств, которые недостаточно основаны на фактических данных, и обеспечивать, чтобы технологические достижения согласовывались с концептуальными и эмпирическими разработками. БлагодарностиАвторы выражают благодарность Сергею В. Адамовичу, Крису Аппелю, Эрику Ассманну, Чарльзу Г. Бургару, Мауре Касадио, Джерарду Г. Флюету, Юхе М. Хиджмансу, Махиэлю ван дер Лоосу, Питеру С. Луму, Алиреза Мирбагери, Эшан Рашеди, Джейкоб Розен, Мэри Эллен Стойкова, Фонг-Чин Су и Матич Трлеп за предоставленные фотографии. Визуальная обратная терапия для восстановления функции верхних конечностей у пациентов, перенесших инсульт основанная на визуальной обратной связи терапия (VFT) на восстановлении функции верхних конечностей пациентов с инсультом и двигательной функции коры головного мозга с использованием функциональной магнитно-резонансной томографии (фМРТ).МетодыПациенты с гемиплегическим инсультом были случайным образом разделены на две группы: группу VFT и контрольную группу (CTL).Шестнадцать пациентов в группе VFT получали обычную реабилитацию (CR) и VFT в течение 8 недель, в то время как 15 пациентов в группе CTL получали только CR. Индекс Бартеля (BI) использовался для оценки активности в повседневной жизни в исходном состоянии и на 8,-й, -й неделе восстановительного тренировочного периода. Шкала оценки Фугля-Мейера (FMA), соматосенсорный вызванный потенциал (SEP) и фМРТ использовались для оценки восстановительного эффекта тренировочной терапии. Были измерены задержки и амплитуды N9 и N20.Перед восстановительной тренировкой фМРТ была проведена для всех пациентов в группах VFT и CTL. Кроме того, 17 пациентов (9 в группе VFT и 8 в группе CTL) подверглись фМРТ для последующего наблюдения через 2 месяца после лечения. Качественные данные анализировали с помощью теста х 2 . Независимая выборка t -тест использовалась для сравнения данных с нормальным распределением между различными группами, парная выборка t -тест использовалась для сравнения данных между группами, а непараметрический тест использовался для сравнения данных без нормального распределения между группами. группы. РезультатыНе было никаких существенных различий между группами VFT и CTL по всем показателям. Однако после 8 недель восстановительных тренировок все эти показатели значительно улучшились ( P < 0,05). По сравнению с группой ЦТЛ показатели FMA, BI, задержки N9/N20 и амплитуды SEP в группе VFT были значительно улучшены ( P < 0,05). Через два месяца после восстановительной тренировки фМРТ показала, что степень активации двусторонней центральной передней извилины, теменной доли и вспомогательных двигательных областей была значительно выше в группе VFT, чем в группе CTL ( P < 0.05). ВыводыVFT, основанная на теории зеркальных нейронов, является эффективным подходом к улучшению двигательной функции верхних конечностей и показателей повседневной активности пациентов, перенесших инсульт. Терапевтический механизм способствует переобучению моторики за счет активации системы зеркальных нейронов и моторной коры. Амплитуда SEP увеличивалась только у пациентов, участвовавших в зрительной обратной связи. VFT способствует сенсомоторной пластичности и поведенческим изменениям как в моторной, так и в сенсорной областях. Ключевые словаКлючевые слова 9095Ключевые слова:Ключевые словаКлючевые словаКлючевые словаКлючевые слова на русском:Действия Daily Living Действия Действия Зеркальные нейроны Motor Cortex Realablation Соматосенсиорированные потенциалы инсульт Visual обратная связь Рекомендуемые статьи на Статьи (0) © 2020 Китайская сестра Ассоциация.Производство и размещение Elsevier B.V. Рекомендованные статьиСсылки на статьиПодходы с лечебной физкультурой к неоперативному и послеоперационному лечению бедренно-вертлужного импинджмент-синдромаВ международном консенсусном заявлении 2 от 2016 г. описано междисциплинарное соглашение по диагностике и лечению пациентов с FAIS. В этом заявлении FAIS был определен как клиническое расстройство, связанное с движением, с симптомами боли в бедре, паху, спине и ягодицах.Рекомендуемая оценка FAIS включала трехсторонний подход: симптомы, клинические признаки и диагностическая визуализация. 2 Симптомы FAIS, о которых сообщают пациенты, подробно описаны в таблице 1. Боль можно ненадолго уменьшить при пальпации по знаку «С» (рис. 2). Для количественной оценки анамнеза пациента доступны опросники, такие как модифицированная шкала Harris Hip Score (mHHS) и различные международные инструменты оценки результатов лечения тазобедренного сустава (iHOT-33, iHOT-12), но ни один инструмент оценки не упоминается в литературе в качестве стандартного критерия. (Таблица 2). 13,14 Физикальное обследование тазобедренного сустава хорошо описано, но основное внимание уделяется боли в тазобедренном суставе в целом. Большинство сообщений о диагностике FAIS касались либо анамнеза, либо визуализации. Ограниченное количество сильных исследований было сосредоточено на клинической точности физикальных тестов для FAIS. Доступным исследованиям мешает малое количество участников, различия в методах исследования и оценках, которые не ограничивались FAIS. 15 Информация, касающаяся статистической ценности этих маневров физического осмотра, отсутствовала или предполагала, что тесты неадекватны как единственные диагностические инструменты. Концептуально полное обследование тазобедренного сустава рассматривает 4 различных анатомических слоя: костно-хрящевой, капсулолабральный, мышечно-сухожильный и сосудисто-нервный (табл. 3). 14,16 С практической точки зрения при обследовании тазобедренного сустава пациент оценивается в положении стоя, сидя, на спине, на боку и на животе. 14,17 Внутреннее вращение бедра и амплитуда сгибания бедра являются важными показателями (таблица 4). Различия между сторонами могут отражать патологическое состояние тазобедренного сустава. Положение сидя стабилизирует как таз, так и угол сгибания бедра для оценки внутренней и внешней ротации бедра. 14,17 Выполнение сгибания, приведения и внутренней ротации бедра (FADIR) у пациента в положении лежа — еще одна распространенная клиническая процедура, используемая для диагностики FAIS (видео 1, доступно на http://dx.doi.org/10.4085/1062-6050-0488.19.С1). 14,17,18,20 Потеря внутреннего вращения ROM в одностороннем порядке указывает на FAIS. Исследователи 21 продемонстрировали, что FADIR имеет чувствительность 94 % и специфичность 8 %. В настоящее время это единственный признак физического обследования, рекомендуемый для исключения заболевания тазобедренного сустава у активных взрослых людей молодого и среднего возраста. 15 В литературе обсуждалось несколько других тестов, но статистический анализ их полезности либо неприемлем, либо отсутствует.В эту категорию попадают тест с перекатыванием бревен в положении лежа (видео 2), симптом Дремана, тест с динамическим внутренним вращательным импинджментом (видео 3) и тест с динамическим внешним вращательным импинджментом (видео 4). Обзор распространенных тестов для определения патологических состояний тазобедренного сустава и доступные значения чувствительности и специфичности представлены в таблице 4 и на рисунке 2. Не существует единого клинического теста для диагностики FAIS с адекватной чувствительностью или специфичностью, или тем и другим. Боль в бедре и ревизионная хирургия бедраОсновы ревизионной хирургии тазобедренного суставаЗагрузите бесплатное руководство по лечению боли в бедре Хирургическая ревизия тазобедренного сустава проводится для восстановления искусственного тазобедренного сустава (протеза), который со временем был поврежден из-за инфекции или из-за нормального износа протеза тазобедренного сустава.Ревизионная хирургия помогает исправить проблему, чтобы бедро снова могло нормально функционировать. Использование искусственных имплантатов тазобедренного сустава чрезвычайно эффективно для улучшения состояния тазобедренных суставов, поврежденных в результате травмы или какой-либо формы артрита. Искусственные суставы, в том числе и тазобедренные, не вечны. Типичный срок службы искусственного тазобедренного сустава составляет 10-15 лет, в зависимости от ежедневного использования сустава пациентом. Пациенты с искусственными тазобедренными суставами обычно старше 55 лет, и у них развился тяжелый артрит тазобедренного сустава.После периода нормального износа тазобедренного сустава протез не так надежно прилегает и не так эффективен. В этих случаях врач может порекомендовать операцию по ревизии тазобедренного сустава. Ревизионная операция также может быть рекомендована, если в тканях, окружающих сустав, развилась инфекция. При заражении мышцы, сухожилия и связки в тазобедренном суставе ослабевают и повреждаются. Инфекция также повредит бедренную кость. Что вызывает боль в бедре?Основной причиной ревизионной операции тазобедренного сустава является восстановление искусственного имплантата тазобедренного сустава, который может быть ненадежно прикреплен к кости, что приводит к аномальному движению, вызывающему боль у пациента.Операция по ревизии тазобедренного сустава — это попытка восстановить бедро и восстановить его до состояния, при котором оно может нормально функционировать. Каковы преимущества ревизионной хирургии тазобедренного сустава?Облегчение боли является основным преимуществом ревизионной операции на тазобедренном суставе. Многие пациенты могут обнаружить, что операция по ревизии тазобедренного сустава улучшает подвижность, силу и координацию туловища и ноги, а также улучшает внешний вид бедра и ноги. Ревизионная хирургия может позволить пациентам снова вернуться к нормальной деятельности с безболезненным бедром.Но имейте в виду, что успешная операция по ревизии тазобедренного сустава также зависит от усердия пациента в отношении его или ее программы реабилитации после операции. Каковы риски ревизионной операции на тазобедренном суставе?Имейте в виду, что операция по ревизии тазобедренного сустава является добровольной, но безопасной процедурой. Могут развиться непредвиденные осложнения, связанные с анестезией, такие как дыхательная или сердечная недостаточность. Кроме того, осложнения могут возникнуть из-за инфекции, повреждения нервов и кровеносных сосудов, перелома, слабости, тугоподвижности или нестабильности сустава, боли или возможности повторных операций на бедре. Как подготовиться к ревизионной операции на тазобедренном суставе?Чтобы подготовиться к операции, пациентов просят записаться на ряд встреч до даты операции, чтобы пройти обследование и получить разрешение на операцию. Назначения начинаются по крайней мере за месяц до даты операции. Во время этих приемов проводятся исследования, включая лабораторные анализы, анализ мочи, ЭКГ и рентген. Врач также может порекомендовать дополнительные исследования, такие как сканирование костей. На основании результатов этих тестов и истории болезни пациента инициируется операция.В зависимости от состояния пациента перед операцией может потребоваться дополнительное обследование. Пациенты также могут принять меры в домашних условиях, чтобы облегчить восстановление после операции. Внесите несколько простых изменений в доме и попросите кого-нибудь помочь вам в течение нескольких недель после операции. Обсудите со своим хирургом, следует ли вам сдавать собственную кровь для операции, и назначьте встречи с лечащим врачом и стоматологом. Если вы курите, постарайтесь бросить или сократить курение, чтобы снизить риск хирургического вмешательства и ускорить выздоровление. Попробуйте эти советы дома перед операцией на бедре:
Специальное оборудование поможет облегчить восстановление после операции на бедре. Ваши физиотерапевты и эрготерапевты порекомендуют вам оборудование и помогут вам и вашей семье получить это оборудование после операции. Некоторое из этого оборудования может включать:
Ничего не ешьте и не пейте после полуночи накануне операции. ЛекарстваСообщите своему хирургу обо всех ваших лекарствах, как безрецептурных, так и рецептурных. Некоторые лекарства плохо реагируют на анестезию, а другие, такие как аспирин, ибупрофен и антикоагулянты, усиливают кровотечение. По этим причинам вам может потребоваться прекратить прием определенных лекарств перед заменой тазобедренного сустава. Если вы принимаете аспирин или препараты на основе аспирина для лечения артрита, вы должны прекратить их прием за две недели до операции. Если вы принимаете лекарства для решения других проблем со здоровьем, не прекращайте их прием без консультации с лечащим врачом.Обязательно возьмите с собой список всех лекарств, дозировки и частоту их приема. Сюда входят все растительные добавки и витамины. Это важная информация, которая будет задокументирована в ваших больничных записях. СтоматологияПроведите чистку зубов и убедитесь, что у вас нет кариеса, о котором может потребоваться уход в течение первых нескольких месяцев после операции. Поскольку кровоснабжение тазобедренного сустава увеличивается во время заживления, любые рутинные стоматологические операции лучше проводить либо до операции, либо через три месяца после нее.Кроме того, любые непредвиденные ситуации должны быть решены немедленно. Вы будете продолжать использовать антибиотики перед любым стоматологическим вмешательством до конца жизни после полной замены тазобедренного сустава. АнестезияПеред операцией по замене тазобедренного сустава с вами встретится сотрудник анестезиологического отделения клиники Кливленда. Они объяснят вам различные виды анестезии, а также риски и преимущества операции. Спинальная или регионарная анестезия является наиболее распространенным и безопасным методом, используемым для ортопедических процедур.Вас также попросят заполнить анкету о состоянии здоровья в отделении анестезиологии для получения разрешения на операцию, чтобы обеспечить вашу безопасность. ФизиотерапияОтделение физиотерапии клиники Кливленда проводит оценку всех пациентов перед операцией. После операции вы будете проходить ежедневную физиотерапию. Донорство кровиВы можете сдать собственную кровь для операции. Вы должны уведомить своего врача или помощника врача, если это вас интересует. Что мне нужно сделать в день операции на бедре?В день операции пациенты поступают на стойку P-20 (в вестибюле здания P) и обычно проводят в больнице в среднем от 4 до 5 дней. Ассистент врача сообщит вам, во сколько вас примут в день операции. Припарковаться можно в гараже на улице E.90th Street, примыкающем к хирургическому центру P-20. Что происходит во время операции?Во время операции по замене тазобедренного сустава больные части тазобедренного сустава вырезаются и заменяются искусственным тазобедренным суставом.При ревизионной хирургии тазобедренного сустава искусственный тазобедренный сустав удаляется и заменяется новым. В зависимости от тяжести инфекции может потребоваться более одной операции по ревизии тазобедренного сустава. В этих более тяжелых случаях потребуется первая операция по удалению старой рубцовой ткани протеза и лечению сустава антибиотиками от инфекции. Когда тазобедренный сустав вылечен от инфекции, проводится операция по установке нового протеза. Что происходит после операции?После операции хирург может назначить лекарства или терапию для предотвращения образования тромбов.Чтобы снизить вероятность тромбоза глубоких вен (ТГВ) после операции, вам могут давать лекарства, носить специальные чулки и делать помпу на лодыжке через два-три дня после операции. Вам также может быть назначена контролируемая пациентом анальгезия (PCA), которая позволяет контролировать прием обезболивающих препаратов внутривенно и действует в течение одного или двух дней после операции. Вы можете записаться на прием после операции в зависимости от метода закрытия раны, который предпочел ваш хирург для снятия швов. Вам следует позвонить своему хирургу до этого приема, если у вас возникнут какие-либо из следующих симптомов:
Сколько длится период восстановления после операции на бедре?Операция по ревизии тазобедренного сустава требует периода адаптации.Пациентам важно тренировать ноги, чтобы уменьшить отек, и приподнимать ноги над сердцем во время отдыха. После операции пациенты будут использовать ходунки. Пациенты должны иметь в виду, что обычные действия, такие как посадка в машину или подъем по лестнице, будут затруднены. Примерно через месяц врач сделает рентген ноги, чтобы контролировать заживление. Примерно через 6 месяцев пациенты смогут ходить без хромоты и боли в бедре. Что такое реабилитация после операции?Реабилитация и физиотерапия начинаются сразу после операции по замещению и продолжаются на протяжении всей госпитализации и дома в течение одного года после операции.Физиотерапевт поставит вам цели и инструкции, которые вы должны выполнить в больнице и дома. Эти цели и инструкции могут включать ограничения на нагрузку после операции и специальные упражнения, которые помогут вам в восстановлении. В первый день после операции физиотерапевт встретится с вами в вашей больничной палате для осмотра. На второй день вы отправитесь в отделение физиотерапии на инвалидной коляске для лечения. Ваш физиотерапевт будет контролировать силу и гибкость вашей ноги и бедра, а также вашу способность стоять и сидеть. Ваш врач может решить, что для вашего выздоровления будет лучше, если вы пойдете в реабилитационный центр после выписки из больницы. В реабилитационном центре вы проведете время с физиотерапевтом и эрготерапевтом, восстановите свои силы, узнаете обо всех упражнениях для бедер и мерах предосторожности, которые вам необходимо соблюдать. Продолжительность вашего пребывания в этом учреждении составляет примерно от 5 до 14 дней. Помощник врача или медсестра вашего врача обсудит с вами условия, доступные для ваших нужд, а куратор, специализирующийся на планировании выписки, встретится с вами во время госпитализации.Кейс-менеджер занимается всем планированием вашей реабилитации. Позиционирование после операцииПосле операции ваш физиотерапевт проинструктирует вас о мерах предосторожности при движении тазобедренного сустава и любых ограничениях, которые у вас могут быть в отношении диапазона движений. Имейте в виду, что ваша физиотерапия и укрепляющие упражнения помогут вам повысить подвижность и обеспечат более легкое восстановление после замены тазобедренного сустава. Настоятельно рекомендуется продолжать терапевтическое лечение в течение рекомендованного периода времени, назначенного вашим физиотерапевтом. Существует несколько основных правил позиционирования, которые вы должны знать после операции по замене тазобедренного сустава. Убедитесь, что вы не наклоняетесь вперед более чем на 90 градусов, и не поднимайте колено на стороне замены выше бедра. Кроме того, не скрещивайте ноги, не поворачивайте ногу наружу, не скручивайте и не поворачивайте прооперированное бедро. Сидя, убедитесь, что вы используете стул с прямой спинкой и подлокотниками, и не сидите на стульях или диванах ниже уровня колен, так как они требуют чрезмерного сгибания в бедрах, когда садитесь и встаете.Не садитесь на низкие мягкие диваны или табуретки и помните, что нельзя наклоняться вперед и скрещивать ноги. Поскольку большинство сидений для унитаза имеют высоту ниже колена, пациентам рекомендуется использовать удлинитель сиденья для унитаза, который можно приобрести в больнице или в магазине медицинских товаров. Как мне справиться дома во время восстановления после операции по ревизии тазобедренного сустава?Ниже приведены рекомендации по уходу на дому после ревизионной операции на тазобедренном суставе: Иду домойКогда вы едете домой из больницы, обязательно останавливайтесь каждые 45–60 минут, чтобы выйти из машины и прогуляться.Также делайте лодыжки в машине во время езды. Если вы летите домой, попросите место у прохода и держите оперированную ногу вытянутой в проходе. Вы должны просить о посадке в самолет последним. Отдых и сонПри отдыхе или сне в постели рекомендуется лежать на неоперационной стороне в течение первых четырех-шести недель после операции. Убедитесь, что у вас есть подушка между ногами, а также вторая подушка для поддержки стопы и лодыжки. Если вы ложитесь на операционный бок, имейте в виду, что это может быть неудобно в первые недели после операции и не рекомендуется сразу после операции.Когда вы лежите на спине, у вас должна быть подушка между ногами. Сексуальная активностьПо поводу позы во время полового акта обязательно проконсультируйтесь со своим врачом или фельдшером. Половой акт можно возобновить примерно через 3 недели после операции, соблюдая меры предосторожности, указанные вашим врачом. ДостижениеДотягивание обычно требует слишком большого сгибания и, как правило, неудобно для пациентов после операции на тазобедренном суставе. В течение первых 4-6 недель после операции рекомендуется использовать ричи с длинной ручкой, которые можно приобрести у своего эрготерапевта или в магазине медицинских товаров. ПовязкаДля перевязки, чтобы колено не поднималось выше бедра на стороне операции, вам могут выдать длинную рожку для обуви и перевязочную палочку, которые помогут вам самостоятельно надевать и снимать обувь, носки и штаны. Не забывайте всегда сначала засовывать оперированную ногу в штаны. Если вы носите обувь с завязками, можно использовать эластичные шнурки, чтобы не завязывать шнурки. ЛестницыВаш физиотерапевт научит вас правильно подниматься и спускаться по лестнице, используя поручни и/или костыли. Не забудьте сначала использовать здоровую ногу, затем костыли и оперированную ногу. При спуске по лестнице сначала идут костыли и операционная нога, а затем здоровая нога. КупаниеВо время купания не пытайтесь залезть в ванну, чтобы принять ванну, или использовать верхний душ. Следует избегать чрезмерного сгибания бедер, необходимого для входа и выхода из ванны. Не принимайте душ или ванну с губкой в течение 11 дней после операции. Домашние делаПомните, что нельзя слишком сильно наклоняться или наклоняться, выполняя работу по дому. Домашние дела, которые могут включать в себя чрезмерные изгибы, включают мытье пола, вынос мусора и заправку кроватей, которых вам следует избегать. ХодьбаПосле ревизионной операции вам потребуется использовать ходунки или костыли в зависимости от вашего состояния, которые вам предоставит ваш эрготерапевт или физиотерапевт. Обязательно оставайтесь на костылях или ходунках, пока ваш врач или физиотерапевт не порекомендует вам использовать трость.Ваш врач решит, какой вес вы можете положить на оперированную ногу. В большинстве случаев вы сможете перенести 100 процентов своего веса на оперированную ногу, если не указано иное. Ваш физиотерапевт поможет вам научиться правильно пользоваться ходунками или костылями, а также приобрести подходящее оборудование для использования в домашних условиях. Сумка или корзина, прикрепленная к ходунку, позволит вам носить с собой мелкие предметы во время ходьбы. Питание и физические упражненияЕшьте хорошо сбалансированную пищу и обязательно выполняйте упражнения, которым вас научили в физиотерапии, три раза в день.Имейте в виду, что для того, чтобы ваши мышцы стали сильными, может потребоваться более года, поэтому чрезвычайно важно выполнять упражнения, чтобы обеспечить безопасное и эффективное восстановление. Также не забывайте приподнимать обе ноги, когда сидите, чтобы свести к минимуму отек. ВождениеРекомендуется не садиться за руль в течение 8 недель после операции. Вы можете садиться в машину (в качестве пассажира) примерно через 3 недели после возвращения домой, но избегайте спортивных автомобилей и автомобилей с ковшеобразными сиденьями из-за низкой высоты сиденья.Чтобы сесть в машину и выйти из нее, припаркуйте ее в нескольких футах от бордюра. Встаньте на улице, повернитесь спиной к машине и сядьте. Медленно скользите назад по сиденью, держа ноги прямо, не наклоняясь вперед. Садитесь в машину, свесив ноги к передней части сиденья, держа ноги прямо. Как часто я должен планировать последующие визиты к врачу после операции на бедре?Послеоперационные посещения помогают хирургу убедиться, что ваше бедро заживает хорошо.Обязательно запланируйте свою первую оценку в течение рекомендованного периода времени, указанного вашим хирургом. Этот рекомендуемый срок составляет от 4 до 6 недель после операции по замене тазобедренного сустава. Также попросите, чтобы любые рентгеновские снимки были отправлены в кабинет вашего хирурга-ортопеда. Рентген тазобедренного сустава обычно делают через неделю после операции, через 12 месяцев, а затем ежегодно. Если у вас возникла проблема до того, как вы назначите повторный прием, обязательно немедленно позвоните фельдшеру вашего врача. В дополнение к первому визиту после выписки рекомендуется следующий дополнительный график:
Важно соблюдать этот график и регулярно посещать врача для обычных посещений офиса, чтобы обеспечить безопасное и эффективное восстановление после операции по ревизии тазобедренного сустава. . | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||